

A Distributed Space Target Tracking Algorithm Based on Asynchronous Multi-sensor Networks
-
摘要:
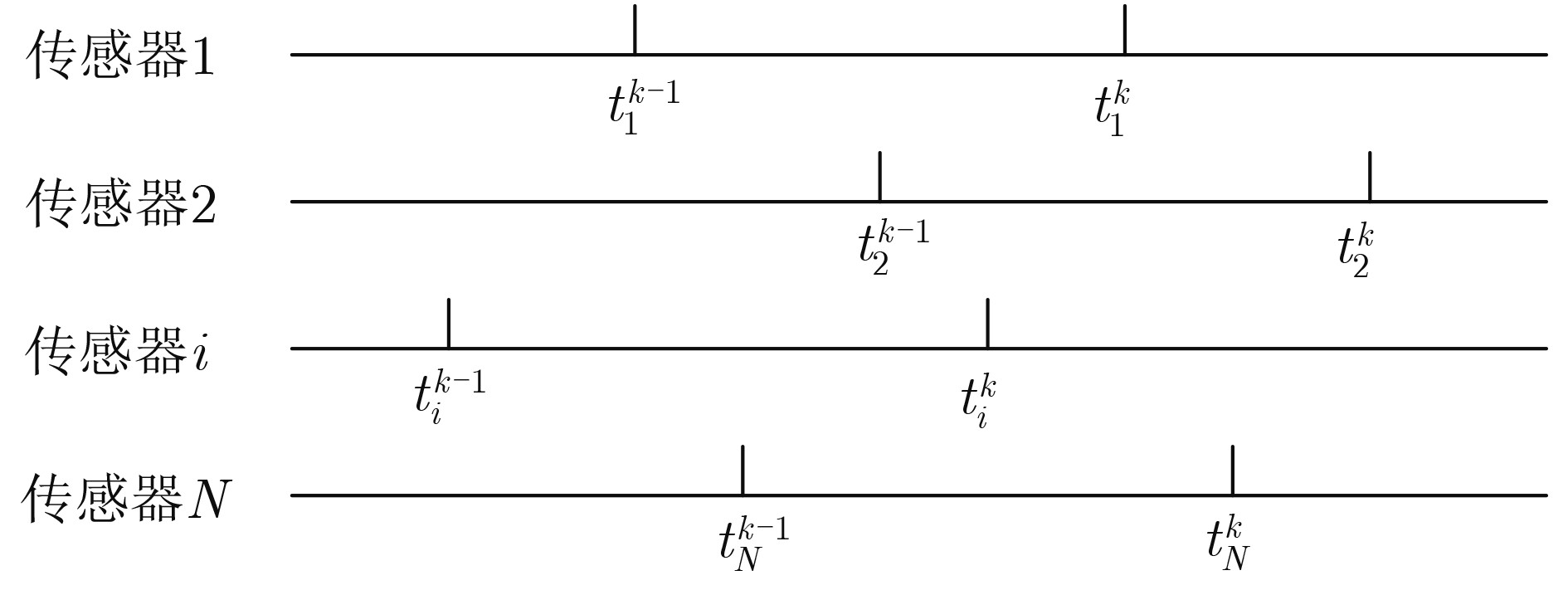
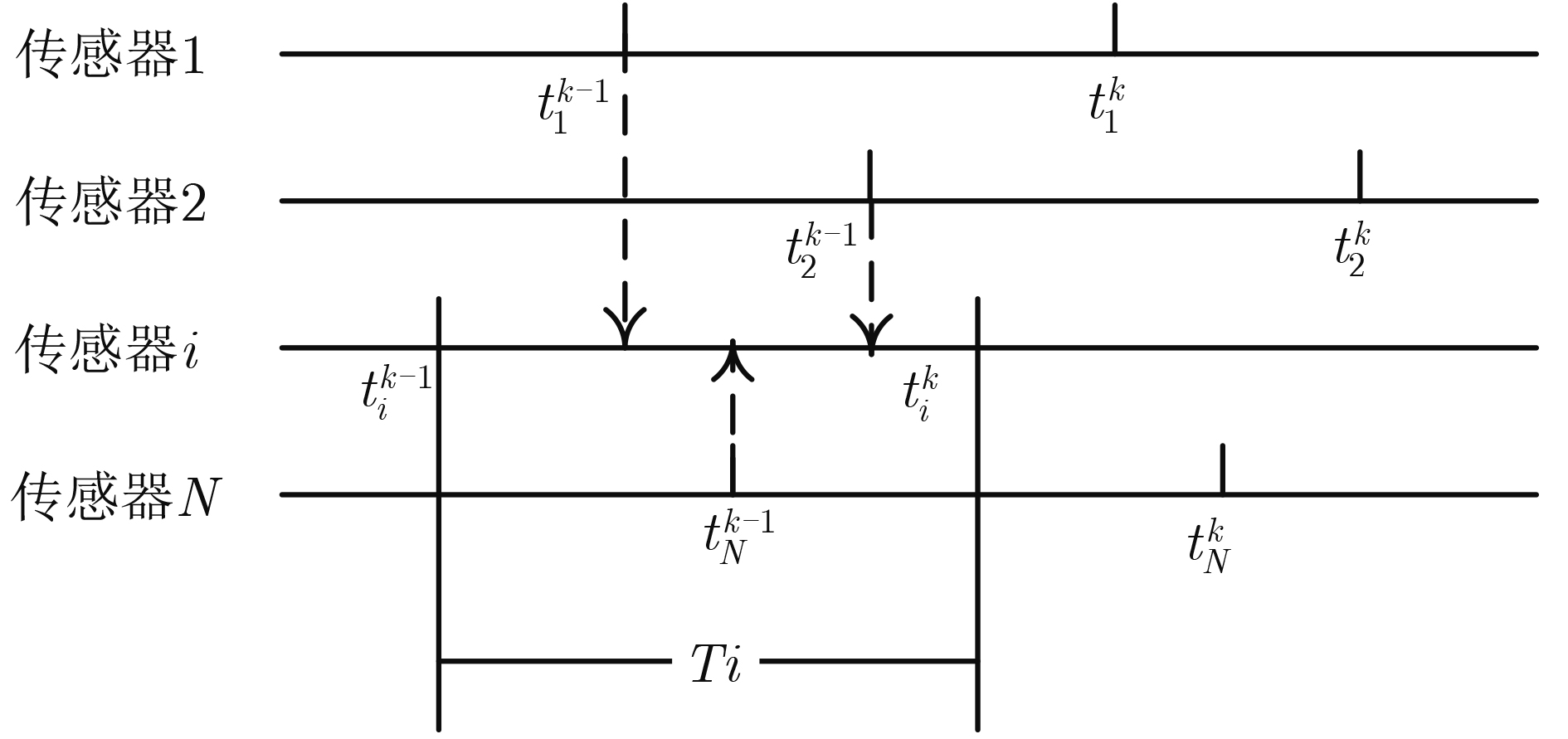
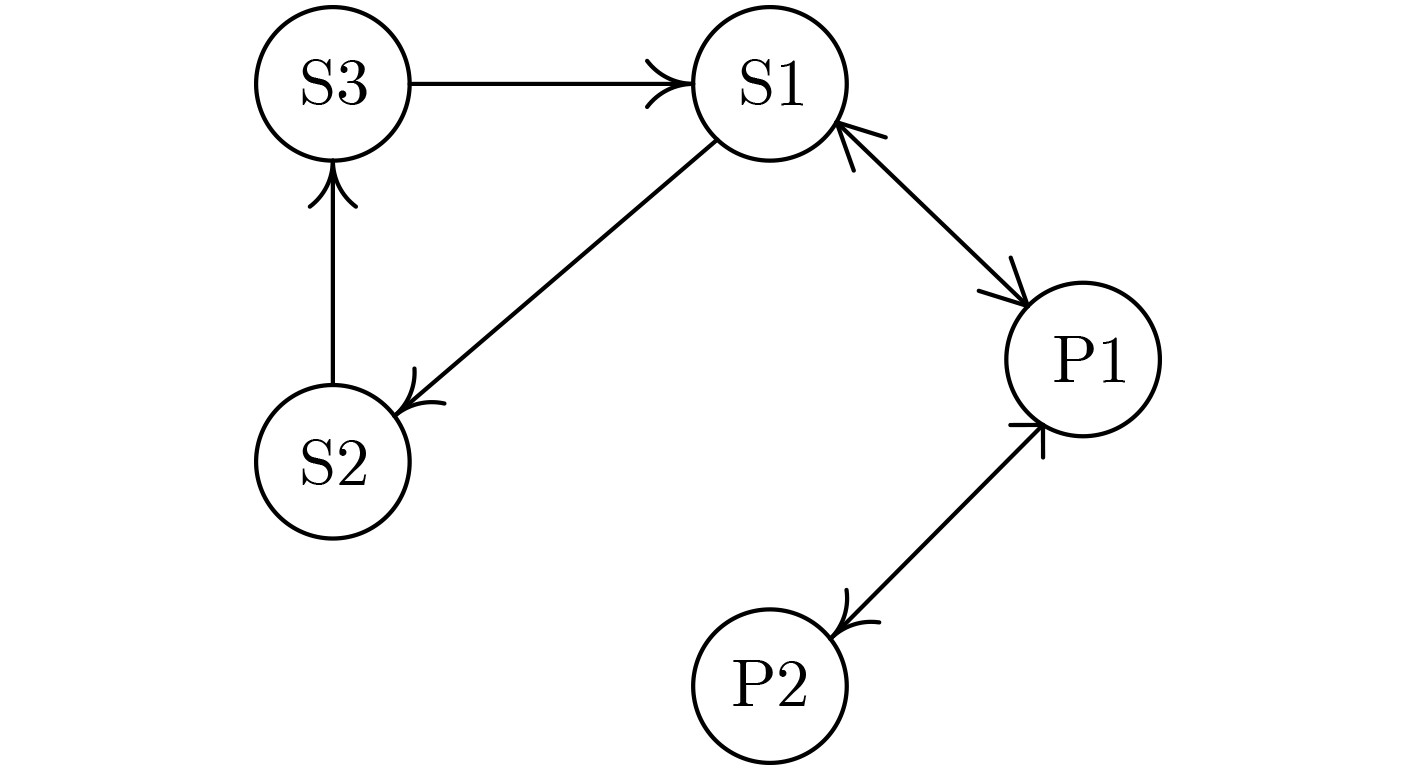
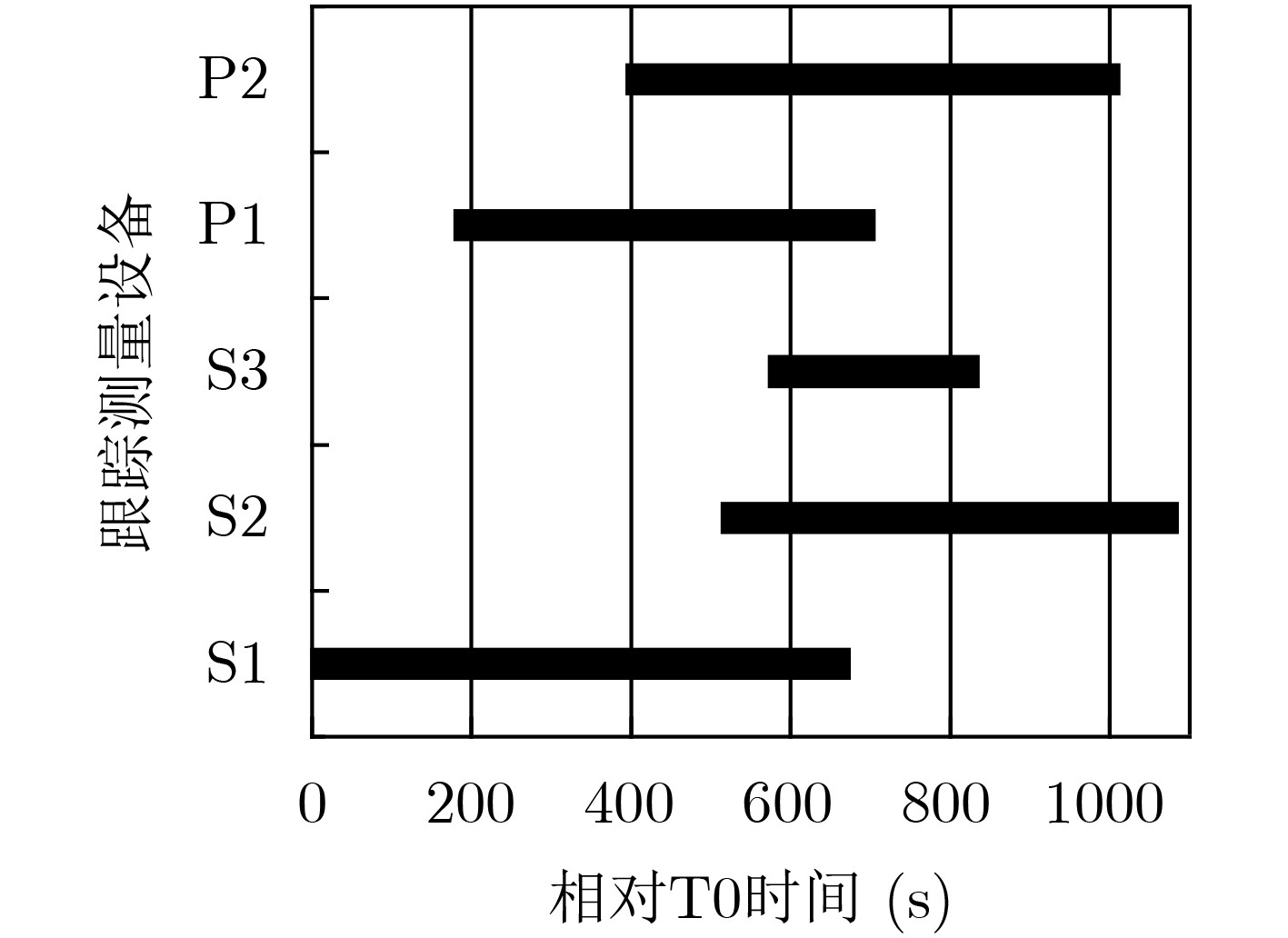
为解决传感器网络在空间目标分布式跟踪过程中的异步采样及通信延迟问题,该文提出一种异步分布式信息滤波算法(ADIF)。首先,局部传感器与相邻节点之间以一定的拓扑结构传递带采样时标的局部状态信息和量测信息,然后将收到的异步信息按时间排序,使用ADIF算法进行计算,分别对目标状态进行估计。该方法实现简单,传感器间通信的次数少,支持网络拓扑的实时变化,适用于空间目标监测中的多目标跟踪问题。该文分别对空间单目标、多目标跟踪进行了仿真,结果表明算法可以有效解决异步传感器滤波问题,分布式滤波精度一致逼近于集中式结果。
Abstract:To solve the problem of asynchronous sampling and communication delay of sensor network in space target tracking, an Asynchronous Distributed algorithm based on Information Filtering (ADIF) is proposed. First, local state information and measurement information with sampling time is transmitted between local sensor and adjacent nodes in a certain topology structure. Then, the local sensor sorts the received asynchronous information by time, and ADIF algorithm is used to calculate the target state respectively. This method is simple to implement, the frequency of communication between sensors is small, and it supports the real-time change of network topology, which is suitable for multi-target tracking. In this paper, single target and multi-target tracking are simulated respectively. The results show that the algorithm can effectively solve the problem of asynchronous sensor filtering, and the distributed filtering accuracy converges to the centralized result.
-
表 1 目标初始轨道
历元 X(m) Y(m) Z(m) Vx(m·s–1) Vy(m·s–1) Vz(m·s–1) 2019-04-25 04:11:56 980093.466 1709342.512 6698030.714 6293.741438 3734.785328 –1863.584480  下载: 导出CSV
下载: 导出CSV
表 2 天基光学相机轨道根数
天基相机 历元 a(km) e i(°) Ω(°) ω(°) M(°) P1 2019-4-25 04:00:00 6878.137 0.000011 45.0 359.8 0.0 339.8 P2 2019-4-25 04:00:00 6778.137 0.000010 63.4 250.1 10.2 35.0
下载: 导出CSV
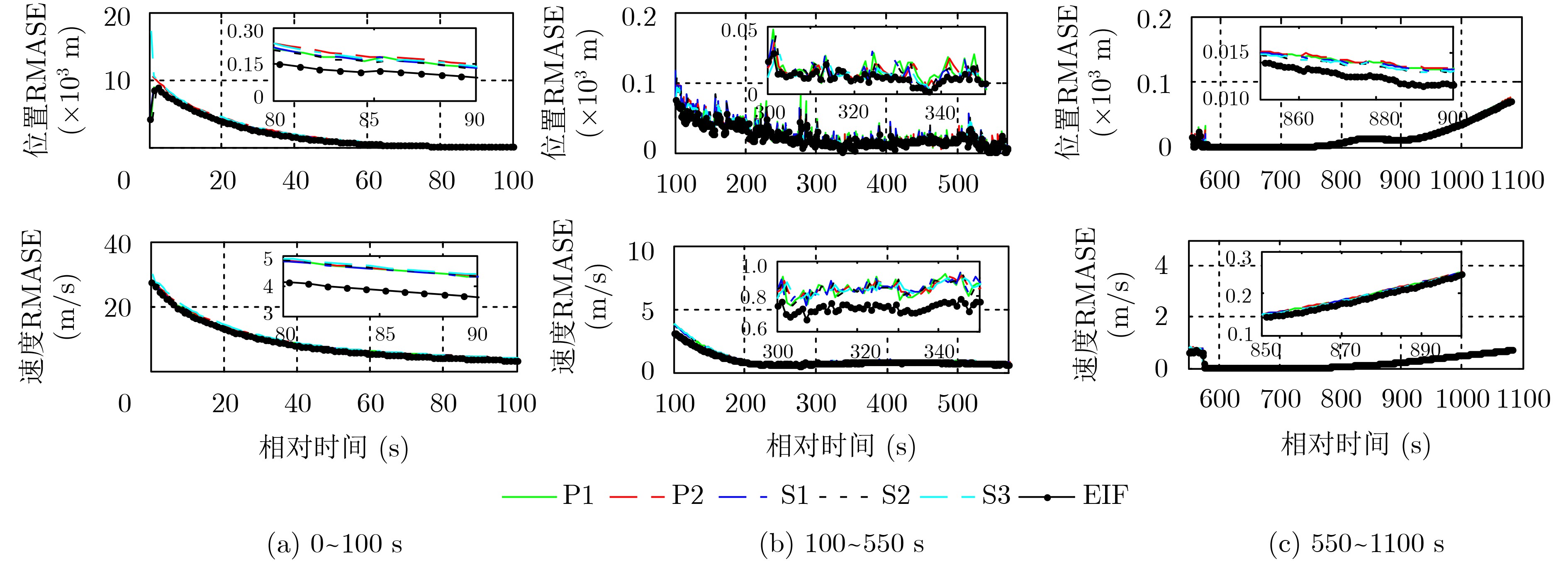
表 3 各测站集中式与分布式滤波位置平均RMSE
滤波类型 P1 P2 S1 S2 S3 位置 ADIF(m) 11.4389 10.7740 11.6683 11.3893 10.9962 EIF(m) 9.6533 速度 ADIF(m/s) 0.4550 0.4563 0.4575 0.4564 0.4564 EIF(m/s) 0.3973
下载: 导出CSV
表 4 目标2初始轨道
历元 X(m) Y(m) Z(m) Vx(m·s–1) Vy(m·s–1) Vz(m·s–1) 2019-04-25 04:00:55 6985582.028 542743.450 1003434.795 –966.305250 –1160.131728 –7350.707562
下载: 导出CSV
-
JIA Bin, XIN Ming, PHAM K, et al. Multiple sensor estimation using a high-degree cubature information filter[C]. SPIE 8739, Sensors and Systems for Space Applications VI, Baltimore, USA, 2013: 87390T. doi: 10.1117/12.2015546. LIU Song, SHEN-TU Han, CHEN Huajie, et al. Asynchronous multi-sensor fusion multi-target tracking method[C]. The 14th IEEE International Conference on Control and Automation, Anchorage, USA, 2018: 459–463. KAMAL A T, FARRELL J A, and ROY-CHOWDHURY A K. Information weighted consensus[C]. The 51st IEEE Conference on Decision and Control (CDC), Maui, USA, 2012: 2732–2737. 汪晗, 成昂轩, 王坤, 等. 无线传感器网络分布式迭代定位误差控制算法[J]. 电子与信息学报, 2018, 40(1): 72–78. doi: 10.11999/JEIT170344WANG Han, CHENG Angxuan, WANG Kun, et al. Error control algorithm of distributed localization in wireless sensor networks[J]. Journal of Electronics &Information Technology, 2018, 40(1): 72–78. doi: 10.11999/JEIT170344 CHEN Bo, HU Guoqiang, HO D W C, et al. Distributed Kalman filtering for time-varying discrete sequential systems[J]. Automatica, 2019, 99: 228–236. doi: 10.1016/j.automatica.2018.10.025 BATTISTELLI G, CHISCI L, and SELVI D. A distributed Kalman filter with event-triggered communication and guaranteed stability[J]. Automatica, 2018, 93: 75–82. doi: 10.1016/j.automatica.2018.03.005 OLFATI-SABER R. Distributed Kalman filtering for sensor networks[C]. The 46th IEEE Conference on Decision and Control, New Orleans, USA, 2007: 5492–5498. OLFATI-SABER R. Kalman-Consensus Filter: Optimality, stability, and performance[C]. The 48th IEEE Conference on Decision and Control, Shanghai, China, 2009: 7036–7042. CATTIVELLI F S and SAYED A H. Diffusion strategies for distributed Kalman filtering and smoothing[J]. IEEE Transactions on Automatic Control, 2010, 55(9): 2069–2084. doi: 10.1109/TAC.2010.2042987 HU Jinwen, XIE Lihua, and ZHANG Cishen. Diffusion Kalman filtering based on covariance intersection[J]. IEEE Transactions on Signal Processing, 2012, 60(2): 891–902. doi: 10.1109/TSP.2011.2175386 WANG Shaocheng and REN Wei. On the convergence conditions of distributed dynamic state estimation using sensor networks: A unified framework[J]. IEEE Transactions on Control Systems Technology, 2018, 26(4): 1300–1316. doi: 10.1109/TCST.2017.2715849 KOWALCZUK Z and DOMŹALSKI M. Asynchronous distributed state estimation for continuous-time stochastic processes[J]. International Journal of Applied Mathematics and Computer Science, 2013, 23(2): 327–339. doi: 10.2478/amcs-2013-0025 楚天鹏. 多光电跟踪设备异步序贯分布式目标跟踪算法[J]. 红外与激光工程, 2017, 46(9): 0926002. doi: 10.3788/IRLA201746.0926002CHU Tianpeng. Distributed asynchronous sequential fusion algorithm for multiple optic-electronic tracking devices[J]. Infrared and Laser Engineering, 2017, 46(9): 0926002. doi: 10.3788/IRLA201746.0926002 ZHU Guangming, ZHOU Fan, XIE Li, et al. Sequential asynchronous filters for target tracking in wireless sensor networks[J]. IEEE Sensors Journal, 2014, 14(9): 3174–3182. doi: 10.1109/JSEN.2014.2325400 SHARMA J, STOKES G H, VON BRAUN C, et al. Toward operational space-based space surveillance[J]. Lincoln Laboratory Journal, 2002, 13(2): 309–334. JULIER S J and UHLMANN J K. General Decentralized Data Fusion with Covariance Intersection[M]. LLINAS J, HALL D, and LIGGINS II M. Handbook of Multisensor Data Fusion. 2nd ed. Boca Raton, USA: CRC Press, 2001: 319–342. JIA Bin, XIN Ming, and CHENG Yang. Multiple sensor estimation using the sparse Gauss-Hermite quadrature information filter[C]. 2012 American Control Conference, Montreal, Canada, 2012: 5544–5549. 杨潇, 谢京稳, 郭军海, 等. 高速采样测量数据处理方法研究[J]. 飞行器测控学报, 2008, 27(5): 49–52.YANG Xiao, XIE Jingwen, GUO Junhai, et al. Study on methods of high sampling rate data processing[J]. Journal of Spacecraft TT&C Technology, 2008, 27(5): 49–52. -

 下载:
下载:



计量
- 文章访问数: 3487
- HTML全文浏览量: 1559
- PDF下载量: 116
- 被引次数: 0
