

Two-dimensional DOA Estimation Method for L-shaped Array of Coherent Signals Based on Main Singular Vector
-
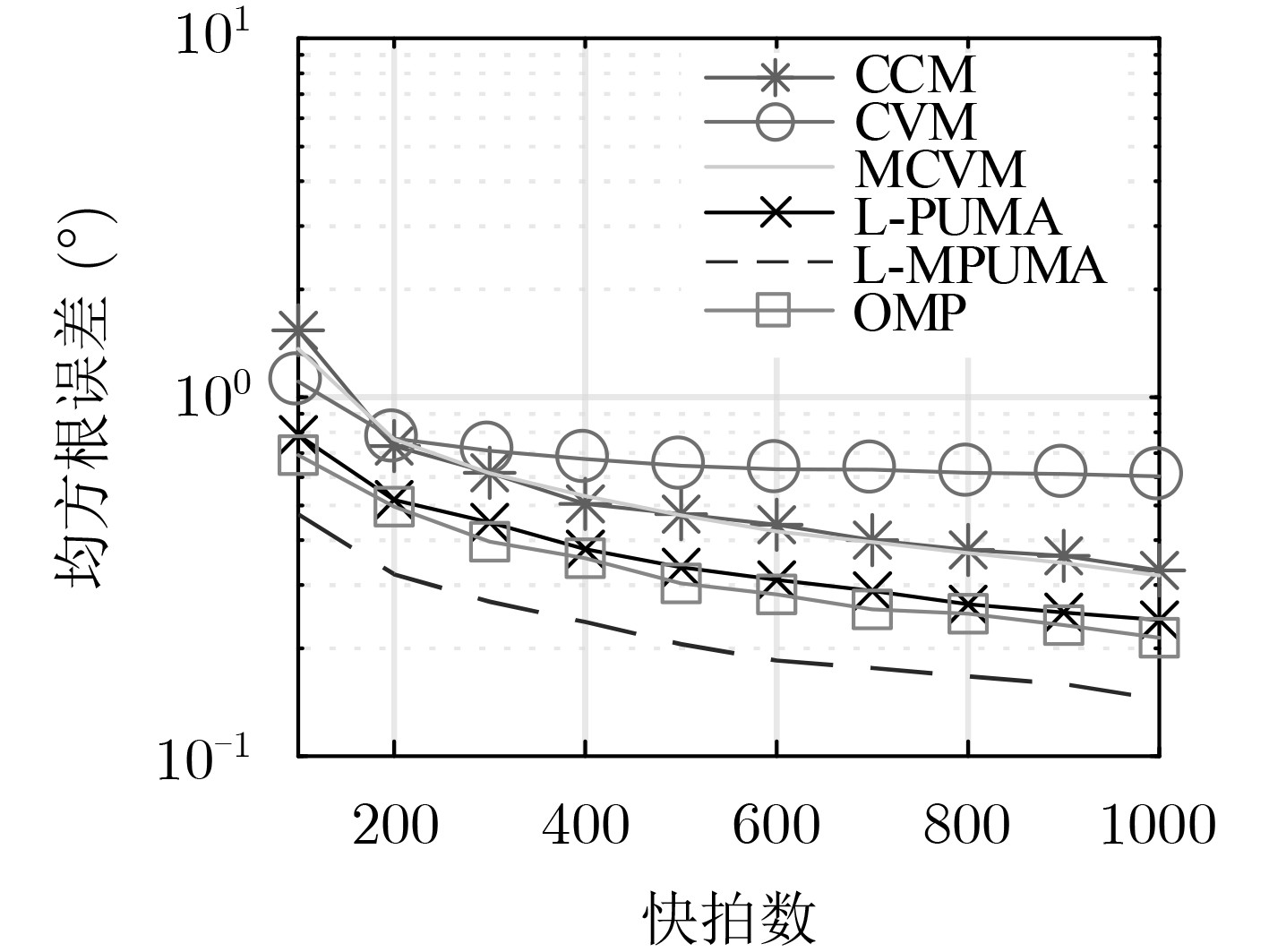
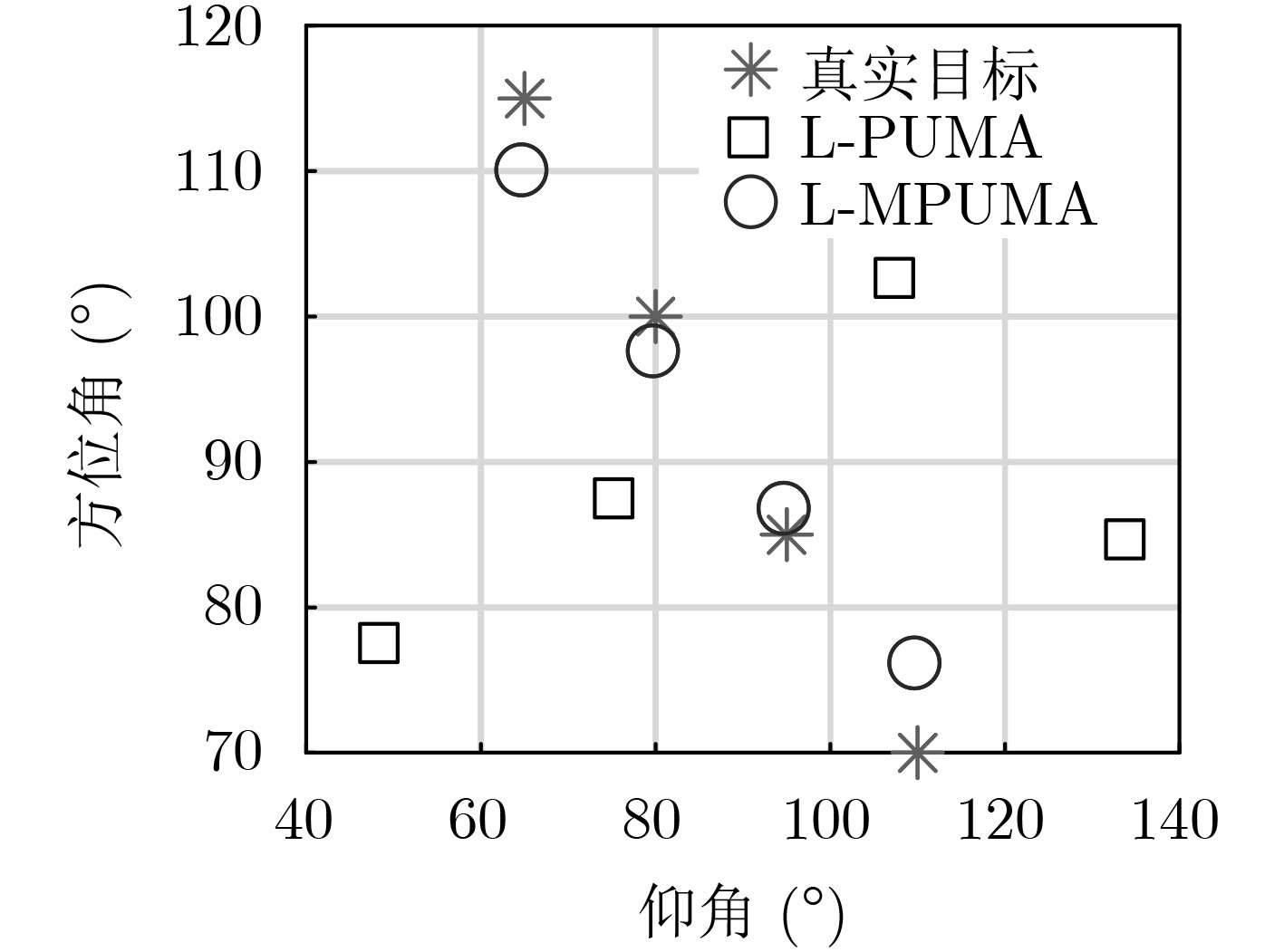
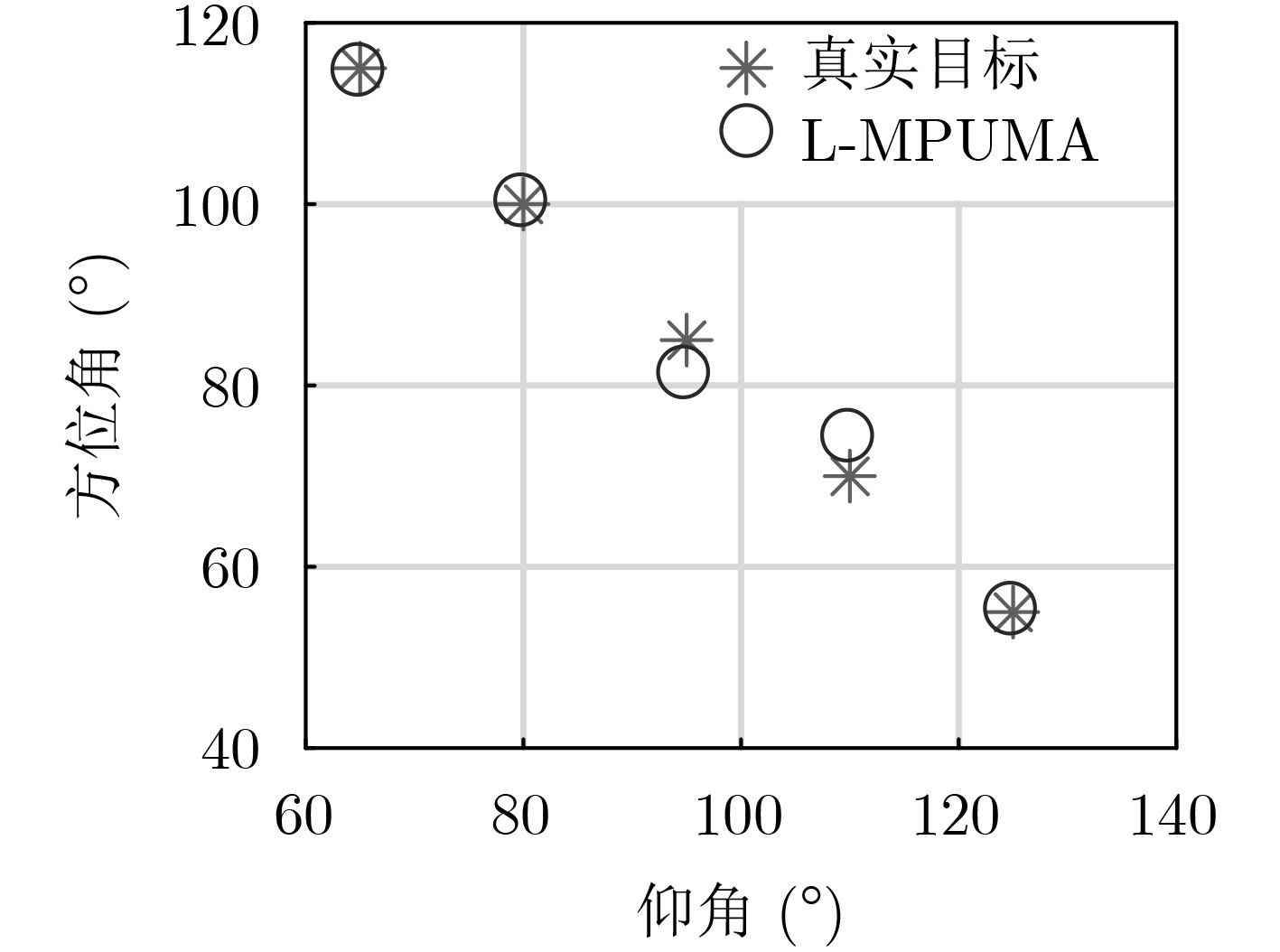
摘要: 针对现有L型阵列相干信号DOA估计算法精度不高、孔径损失较大的问题,该文提出一种基于主奇异矢量的解相干(L-PUMA)方法以及改进的主奇异矢量法(L-MPUMA)。L-PUMA算法首先对互协方差矩阵进行降噪,再通过奇异值分解得到2维主奇异矢量,然后利用加权最小二乘法得到线性预测方程的多项式系数,该线性预测方程的根即为信号的DOA估计,最后提出一种新的配对算法实现仰角和方位角的配对。L-MPUMA算法利用反向共轭变换构造增广主奇异矢量,进一步提高了数据利用率,克服了信号完全相干时L-PUMA算法性能下降严重的问题,仿真实验验证了所提算法的高效性。Abstract: In order to handle the problem that the existing DOA estimation algorithm for L-shaped array of coherent signals is not accurate and the aperture loss is large, a method named L-shaped array Principal-singular-vector Utilization for Modal Analysis (L-PUMA) and its modified algorithm named L-shaped array Modified PUMA (L-MPUMA) are proposed. L-PUMA algorithm first denoises the cross-covariance matrix, then obtains the two-dimensional main singular vector by singular value decomposition, and then obtains the polynomial coefficient of the linear prediction equation by weighted least squares method. The root of the linear prediction equation is the DOA estimation of the signals. Finally, a new pairing algorithm is proposed to realize the pairing of elevation and azimuth. L-MPUMA algorithm uses the inverse conjugate transform to obtain the augmented main singular vector, which further improves the data utilization rate and overcomes the problem that the performance of L-PUMA deteriorates seriously when the signals are completely coherent. Simulation experiments verify the efficiency of the proposed algorithm.
-
刘松, 庞育才. 基于扩展ESPRIT的随机阵列高效DOA估计算法[J]. 电子与信息学报, 2019, 41(6): 1324–1329. doi: 10.11999/JEIT180672LIU Song and PANG Yucai. Efficient augmented ESPRIT-based direction-of-arrival estimation algorithm for random arrays[J]. Journal of Electronics &Information Technology, 2019, 41(6): 1324–1329. doi: 10.11999/JEIT180672 杨康, 文方青, 黄冬梅, 等. 基于实值三线性分解的互耦条件下双基地MIMO雷达角度估计算法[J]. 系统工程与电子技术, 2018, 40(2): 314–321. doi: 10.3969/j.issn.1001-506X.2018.02.12YANG Kang, WEN Fangqing, HUANG Dongmei, et al. Real-value-based trilinear decomposition-based direction estimation algorithm for bistatic MIMO radar in the presence of mutual coupling[J]. Systems Engineering and Electronics, 2018, 40(2): 314–321. doi: 10.3969/j.issn.1001-506X.2018.02.12 赵洋, 李新波, 石要武. 声矢量阵列波达方向估计的四元数空间稀疏分解[J]. 光学精密工程, 2018, 26(3): 715–722. doi: 10.3788/OPE.20182603.0715ZHAO Yang, LI Xinbo, and SHI Yaowu. Quaternion sparse decomposition algorithm for DOA estimation with acoustic vector sensor array[J]. Optics and Precision Engineering, 2018, 26(3): 715–722. doi: 10.3788/OPE.20182603.0715 史云飞, 郝永生, 刘德亮, 等. RSS协助的Ray-tracing室内定位算法[J]. 信号处理, 2018, 34(10): 1259–1266. doi: 10.16798/j.issn.1003-0530.2018.10.015SHI Yunfei, HAO Yongsheng, LIU Deliang, et al. RSS-assisted Ray-tracing indoor positioning algorithm[J]. Journal of Signal Processing, 2018, 34(10): 1259–1266. doi: 10.16798/j.issn.1003-0530.2018.10.015 CHEN Y H and LIAN Y T. 2-D multitarget angle tracking algorithm using sensor array[J]. IEE Proceedings – Radar, Sonar and Navigation, 1995, 142(4): 158–161. doi: 10.1049/ip-rsn:19951984 陈建, 王树勋, 魏小丽. 一种基于L型阵列的二维波达方向估计的新方法[J]. 吉林大学学报: 工学版, 2006, 36(4): 590–593.CHEN Jian, WANG Shuxun, and WEI Xiaoli. New method for estimating two-dimensional direction of arrival based on L-shape array[J]. Journal of Jilin University:Engineering and Technology Edition, 2006, 36(4): 590–593. 景小荣, 刘雪峰. L型阵列的二维DOA估计方法[J]. 重庆邮电大学学报: 自然科学版, 2016, 28(1): 24–29. doi: 10.3979/j.issn.1673-825X.2016.01.004JING Xiaorong and LIU Xuefeng. Method of two-dimensional DOA estimation for L-shaped array[J]. Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition, 2016, 28(1): 24–29. doi: 10.3979/j.issn.1673-825X.2016.01.004 ZHANG Xiaofei, LI Jianfeng, and XU Lingyun. Novel two-dimensional DOA estimation with L-shaped array[J]. EURASIP Journal on Advances in Signal Processing, 2011, 2011(1): 50. doi: 10.1186/1687-6180-2011-50 杨艳飞, 高健, 张兴敢. 一种基于L型阵列的改进的二维DOA估计方法[J]. 南京大学学报: 自然科学, 2016, 52(5): 953–959. doi: 10.13232/j.cnki.jnju.2016.05.023YANG Yanfei, GAO Jian, and ZHANG Xinggan. An improved method for estimating two-dimensional DOA based on L-shape array[J]. Journal of Nanjing University:Natural Sciences, 2016, 52(5): 953–959. doi: 10.13232/j.cnki.jnju.2016.05.023 FRIEDLANDER B and WEISS A J. Direction finding using spatial smoothing with interpolated arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(2): 574–587. doi: 10.1109/7.144583 GU Jianfeng, WEI Ping, and TAI Hengming. 2-D direction-of-arrival estimation of coherent signals using cross-correlation matrix[J]. Signal Processing, 2008, 88(1): 75–85. doi: 10.1016/j.sigpro.2007.07.013 史清响, 马秀荣, 谢玉凤, 等. 基于相关矢量法L型阵列相干信号DOA估计[J]. 科学技术与工程, 2015, 15(8): 194–198. doi: 10.3969/j.issn.1671-1815.2015.08.037SHI Qingxiang, MA Xiurong, XIE Yufeng, et al. DOA estimation of coherent signals based on correlation vector method with L-shaped array[J]. Science Technology and Engineering, 2015, 15(8): 194–198. doi: 10.3969/j.issn.1671-1815.2015.08.037 刁鸣, 安春莲. 独立信号与相干信号并存的二维DOA估计新方法[J]. 西安电子科技大学学报: 自然科学版, 2013, 40(5): 66–71, 98. doi: 10.3969/j.issn.1001-2400.2013.05.011DIAO Ming and AN Chunlian. 2-D DOA estimation of coexisting uncorrelated and coherent signals[J]. Journal of Xidian University, 2013, 40(5): 66–71, 98. doi: 10.3969/j.issn.1001-2400.2013.05.011 QIAN Cheng, HUANG Lei, CAO Mingyang, et al. PUMA: An improved realization of MODE for DOA estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(5): 2128–2139. doi: 10.1109/TAES.2017.2683598 LIU Z M, LU Z Y, HUANG Z T, et al. Improved Gerschgorin disk estimator for source enumeration with robustness against spatially non-uniform noise[J]. IET Radar, Sonar & Navigation, 2011, 5(9): 952–957. doi: 10.1049/iet-rsn.2011.0188 安春莲. 独立信号与相干信号并存的测向算法研究[D]. [博士论文], 哈尔滨工程大学, 2013.AN Chunlian. Research on direction finding for coexisted uncorrelated and coherent sources[D]. [Ph. D. dissertation], Harbin Engineering University, 2013. WEI Yinsheng and GUO Xiaojiang. Pair-matching method by signal covariance matrices for 2D-DOA estimation[J]. IEEE Antennas and Wireless Propagation Letters, 2014, 13: 1199–1202. doi: 10.1109/LAWP.2014.2331076 -

 下载:
下载:





图(10)
计量
- 文章访问数: 2086
- HTML全文浏览量: 823
- PDF下载量: 113
- 被引次数: 0
