

A Software-Defined Networking Packet Forwarding Verification Mechanism Based on Programmable Data Plane
-
摘要:
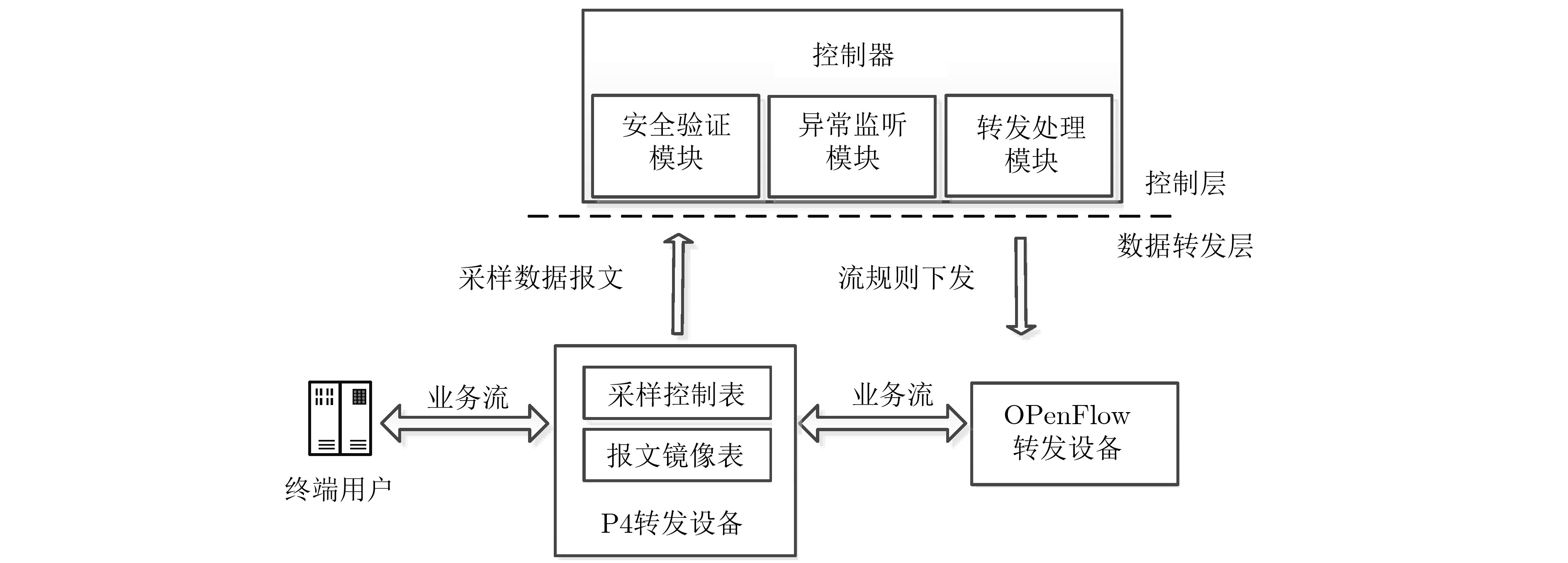
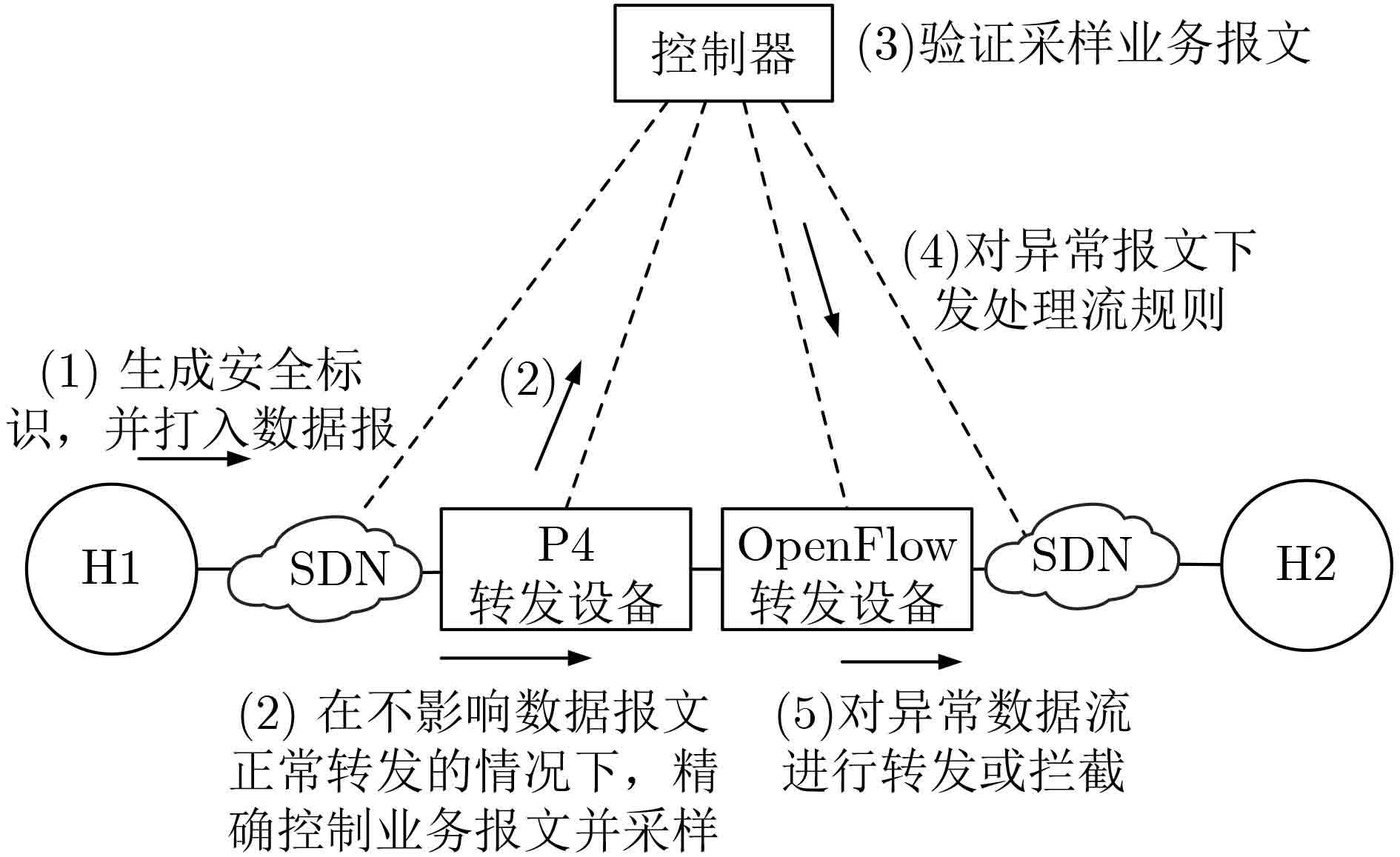
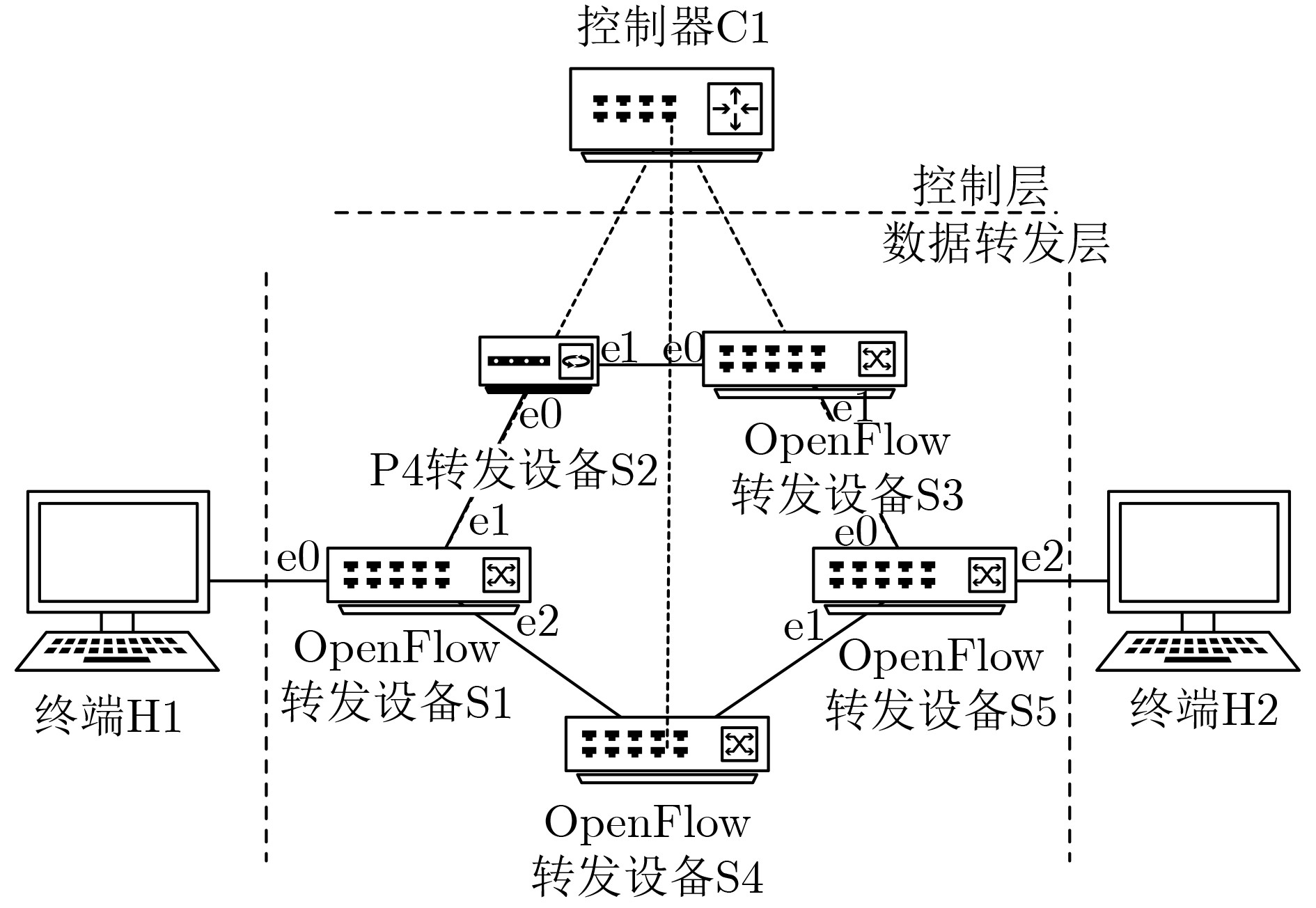
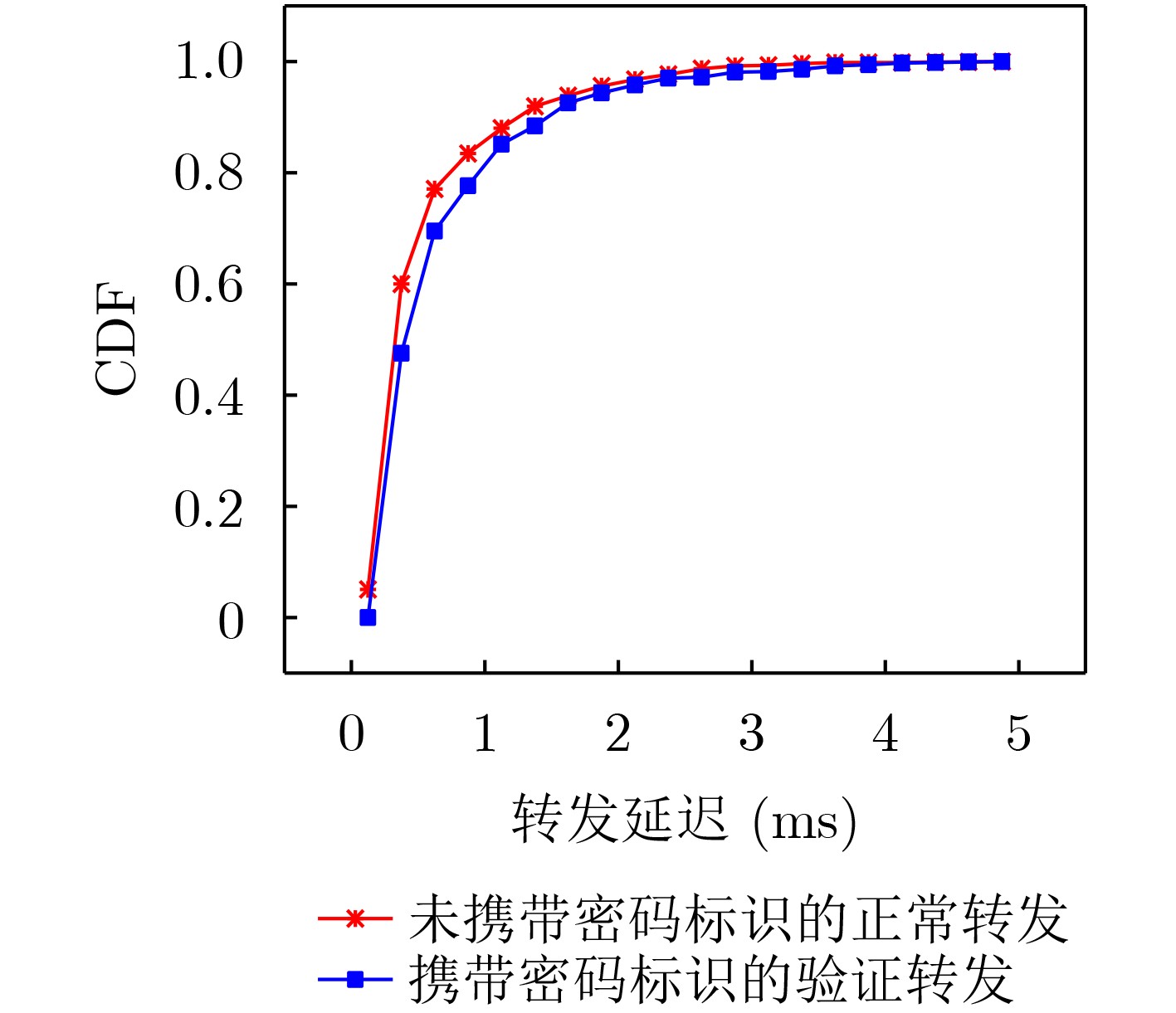
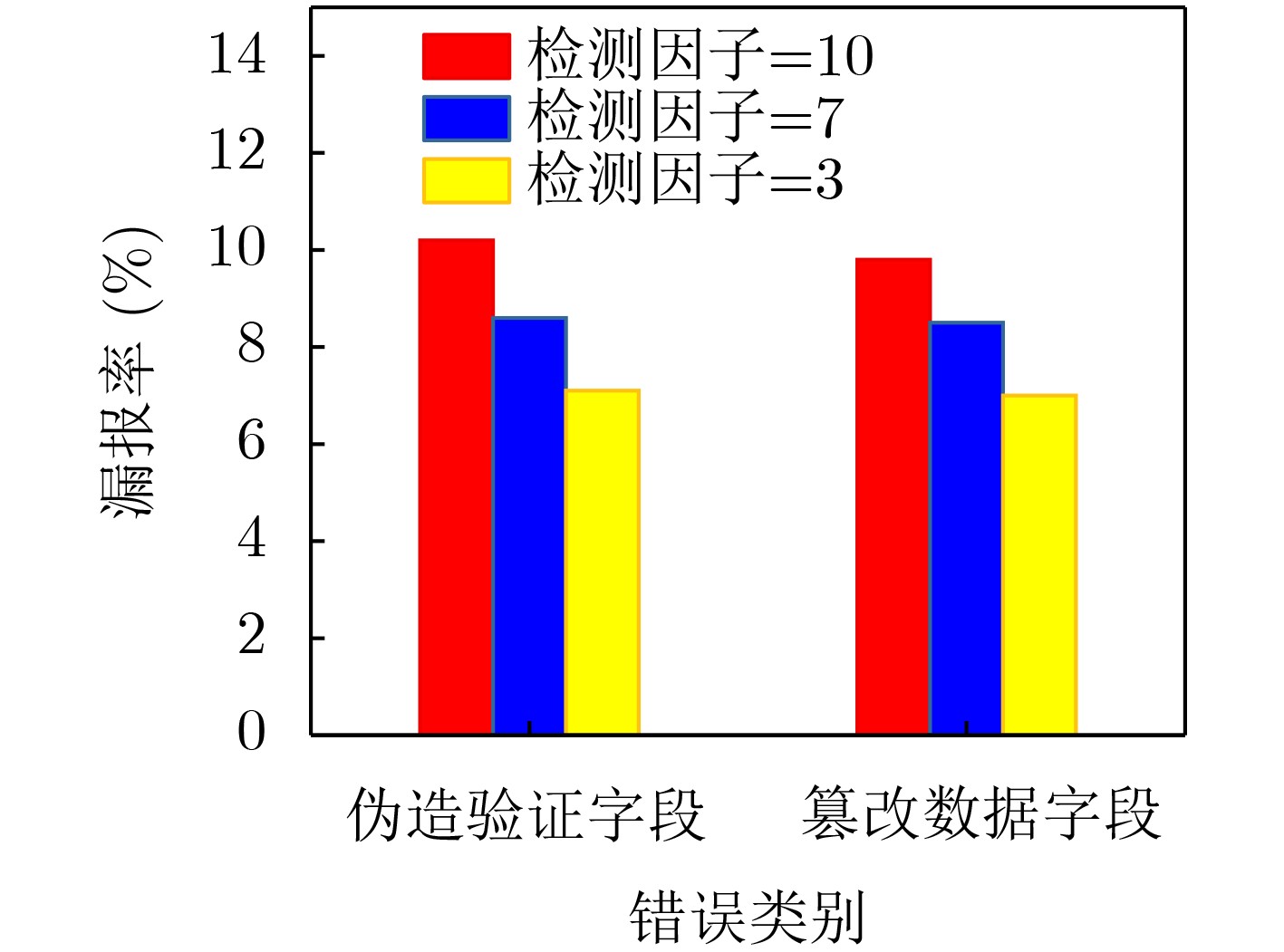
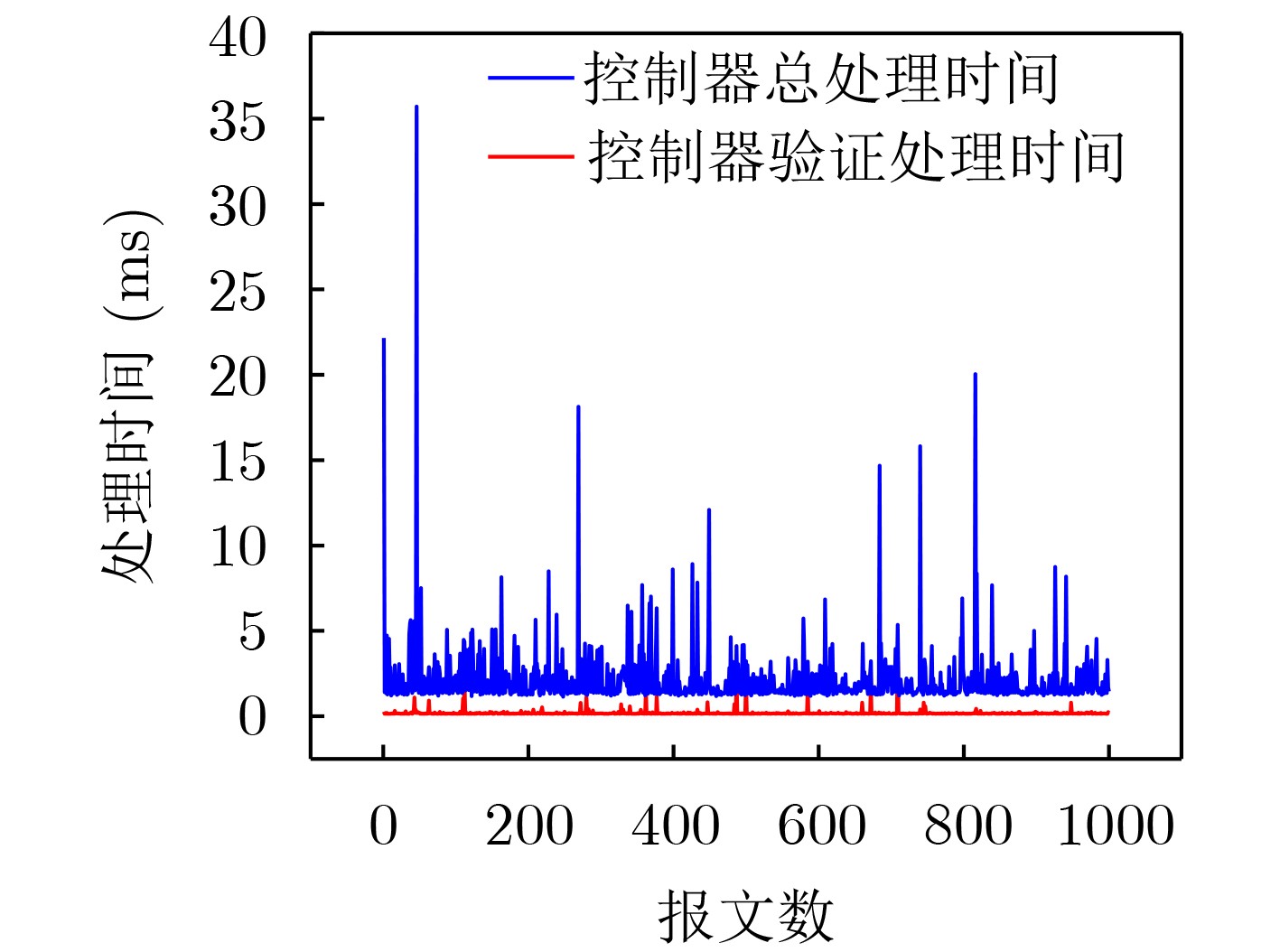
针对软件定义网络(SDN)中OpenFlow协议匹配字段固定且数量有限,数据流转发缺少有效的转发验证机制等问题,该文提出一种基于数据平面可编程的软件定义网络报文转发验证机制。通过为数据报文添加自定义密码标识,将P4转发设备加入基于OpenFlow的软件定义网络,在不影响数据流正常转发的基础上,对网络业务流精确控制和采样。控制器验证采样业务报文完整性,并针对异常报文下发流规则至OpenFlow转发设备,对恶意篡改、伪造等异常数据流进行转发控制。最后,构建基于开源BMv2的P4转发设备和基于OpenFlow的Open vSwitch转发设备的转发验证原型,并构建仿真网络进行实验。实验结果表明,该机制能够有效检测业务报文篡改、伪造等转发异常行为,与同类验证机制相比,在安全验证处理开销保持不变的情况下,能够实现更细粒度的业务流精确控制采样和更低的转发时延。
Abstract:For the fixed and limited number of OpenFlow protocol matching fields, and the lack of effective forwarding verification mechanism for data packet forwarding in the Software-Defined Networking (SDN), a SDN packet forwarding verification mechanism based on programmable data plane is proposed. By adding a cipher identification to the data packet, the P4 forwarding device joins the OpenFlow-based SDN network to control accurately and sample network traffic flow without affecting the normal forwarding of the data flow. The controller verifies the integrity of the sampled packet, and sends flow rules to the OpenFlow forwarding device to control the abnormal data flow such as malicious tampering and forgery. Finally, the forwarding verification prototype and simulation network based on P4 forwarding device and Open vSwitch forwarding device are constructed and tested. The experimental results show that the mechanism can effectively detect the forwarding abnormal behaviors such as packet tampering and forgery. Compared with similar verification mechanisms, in the case of the same security verification processing overhead, it can achieve more fine-grained flow precise control sampling and lower forwarding delay.
-
MCKEOWN N. Software-defined networking[J]. INFOCOM Keynote Talk, 2009, 17(2): 30–32. PALIWAL M, SHRIMANKAR D, and TEMBHURNE O. Controllers in SDN: A review report[J]. IEEE Access, 2018, 6: 36256–36270. doi: 10.1109/ACCESS.2018.2846236 KARAKUS M and DURRESI A. Economic viability of Software Defined Networking (SDN)[J]. Computer Networks, 2018, 135: 81–95. doi: 10.1016/j.comnet.2018.02.015 GAO Shang, LI Zecheng, XIAO Bin, et al. Security threats in the data plane of software-defined networks[J]. IEEE Network, 2018, 32(4): 108–113. doi: 10.1109/MNET.2018.1700283 DARGAHI T, CAPONI A, AMBROSIN M, et al. A survey on the security of stateful SDN data planes[J]. IEEE Communications Surveys & Tutorials, 2017, 19(3): 1701–1725. doi: 10.1109/COMST.2017.2689819 RANA D S, DHONDIYAL S A, and CHAMOLI S K. Software Defined Networking (SDN) challenges, issues and solution[J]. International Journal of Computer Sciences and Engineering, 2019, 7(1): 884–889. doi: 10.26438/ijcse/v7i1.884889 SHAGHAGHI A, KAAFAR M A, BUYYA R, et al. Software-Defined Network (SDN) data plane security: Issues, solutions and future directions[EB/OL]. https://arxiv.org/pdf/1804.00262.pdf, 2018. OPEN Networking Foundation. OpenFlow switch specification version 1.4.0[EB/OL]. https://www.opennetworking.org/images/stories/downloads/sdn-resources/onf-specifications/openflow/openflow-spec-v1.4.0.pdf, 2013. 王首一, 李琦, 张云. 轻量级的软件定义网络数据包转发验证[J]. 计算机学报, 2019, 42(1): 176–189. doi: 10.11897/SP.J.1016.2019.00176WANG Shouyi, LI Qi, and ZHANG Yun. LPV: Lightweight packet forwarding verification in SDN[J]. Chinese Journal of Computers, 2019, 42(1): 176–189. doi: 10.11897/SP.J.1016.2019.00176 SHIN S and GU Guofei. CloudWatcher: Network security monitoring using OpenFlow in dynamic cloud networks (or: How to provide security monitoring as a service in clouds?)[C]. The 20th IEEE International Conference on Network Protocols, Austin, USA, 2012: 1–6. doi: 10.1109/ICNP.2012.6459946. SASAKI T, PAPPAS C, LEE T, et al. SDNsec: Forwarding accountability for the SDN data plane[C]. The 25th IEEE International Conference on Computer Communication and Networks, Waikoloa, USA, 2016: 1–10. doi: 10.1109/ICCCN.2016.7568569. 秦晰, 唐国栋, 常朝稳, 等. 软件定义网络中基于密码标识的报文转发验证机制[J]. 电子与信息学报, 2018, 40(9): 2042–2049. doi: 10.11999/JEIT171226QIN Xi, TANG Guodong, CHANG Chaowen, et al. Packet forwarding authentication mechanism based on cipher identification in software-defined network[J]. Journal of Electronics &Information Technology, 2018, 40(9): 2042–2049. doi: 10.11999/JEIT171226 BOSSHART P, DALY D, GIBB G, et al. P4: Programming protocol-independent packet processors[J]. ACM SIGCOMM Computer Communication Review, 2014, 44(3): 87–95. doi: 10.1145/2656877.2656890 The P4 Language Consortium. The P4 language specification version 1.0.5[EB/OL]. https://p4lang.github.io/p4-spec/p4-14/v1.0.5/tex/p4.pdf, 2018. PRAJAPATI A, SAKADASARIYA A, and PATEL J. Software defined network: Future of networking[C]. The 2nd IEEE International Conference on Inventive Systems and Control, Coimbatore, India, 2018: 1351-1354. doi: 10.1109/ICISC.2018.8399028. Defense Advanced Research Projects Agency. RFC 791: Internet protocol[EB/OL]. http://www.faqs.org/rfcs/rfc791.html, 1981. Ryu Development Team. Ryu documentation release 4.30[EB/OL]. https://ryu.readthedocs.io/en/latest/library_packet.html, 2019. CASADO M, FREEDMAN M J, PETTIT J, et al. Ethane: Taking control of the enterprise[C]. 2007 Conference on Applications, Technologies, Architectures, and Protocols for Computer Communications, Kyoto, Japan, 2007: 1–12. doi: 10.1145/1282380.1282382. -

 下载:
下载:




计量
- 文章访问数: 2734
- HTML全文浏览量: 1262
- PDF下载量: 145
- 被引次数: 0
