

Insulator Orientation Detection Based on Deep Learning
-
摘要:
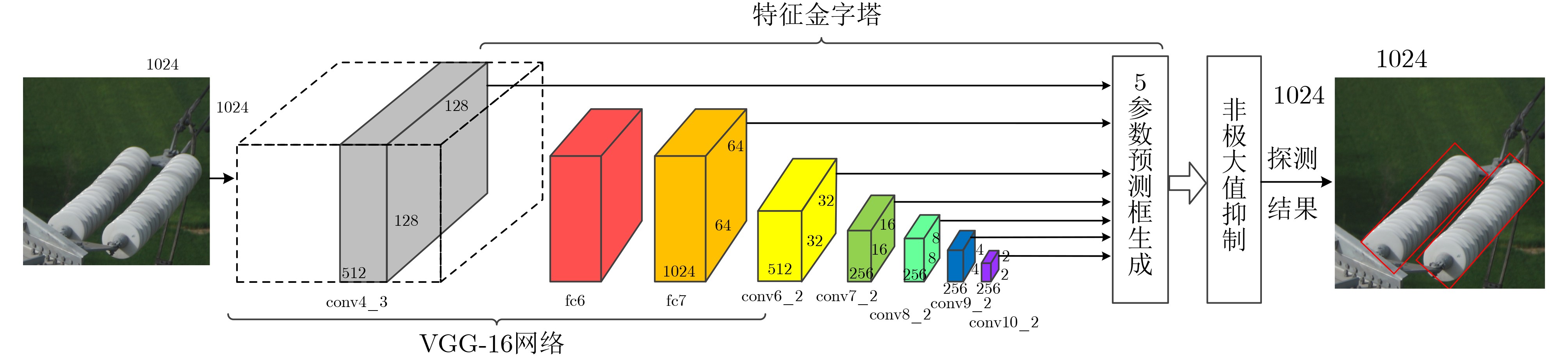
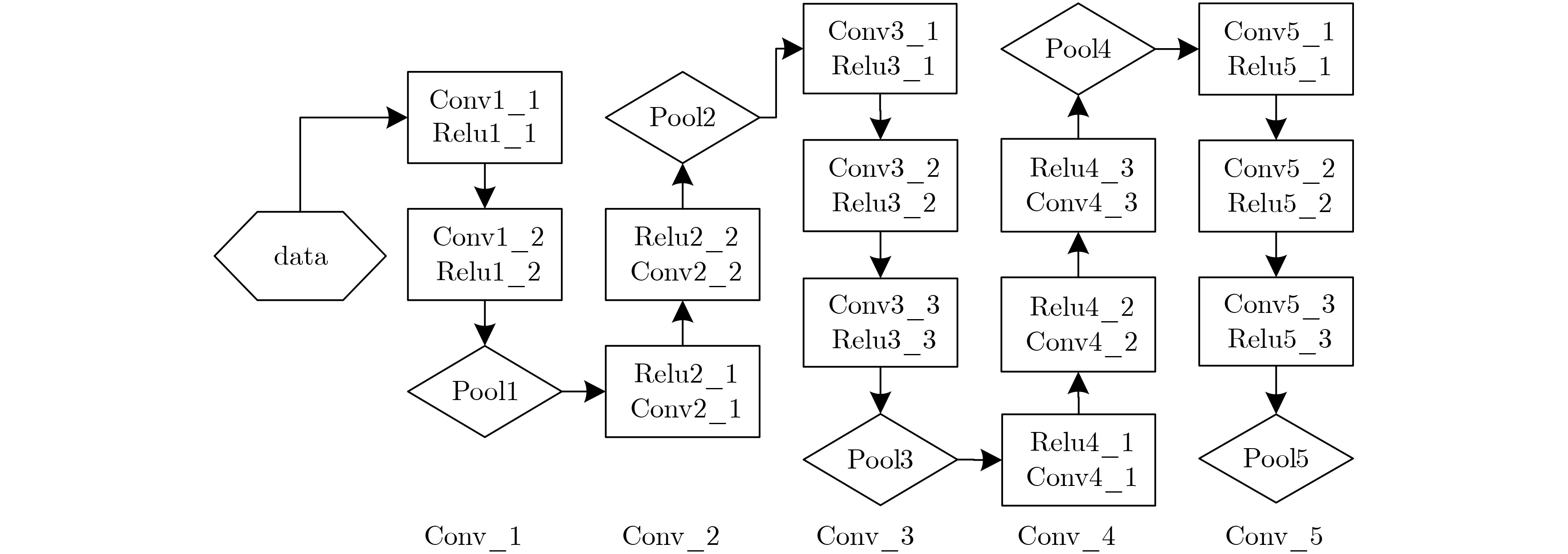
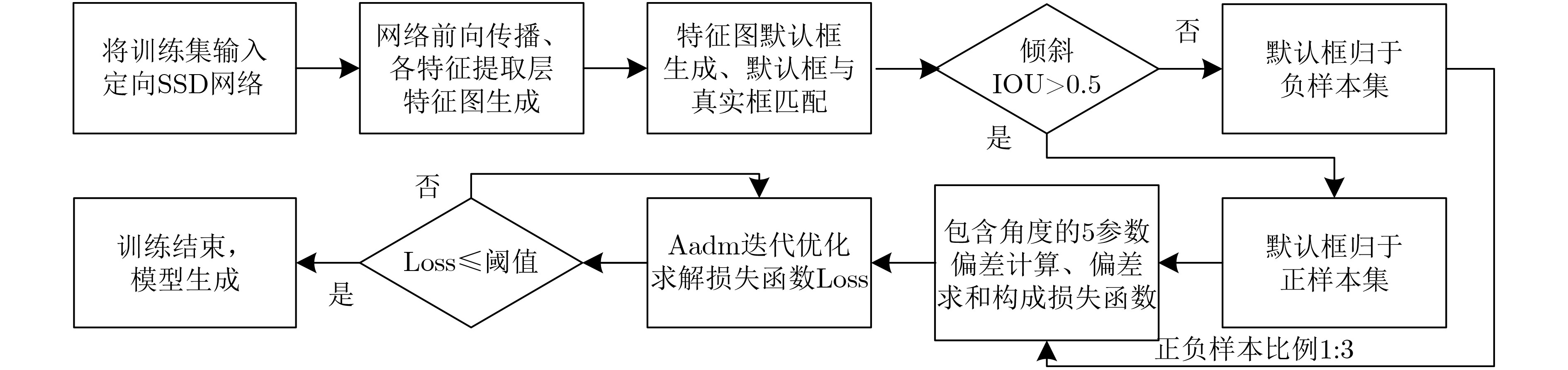
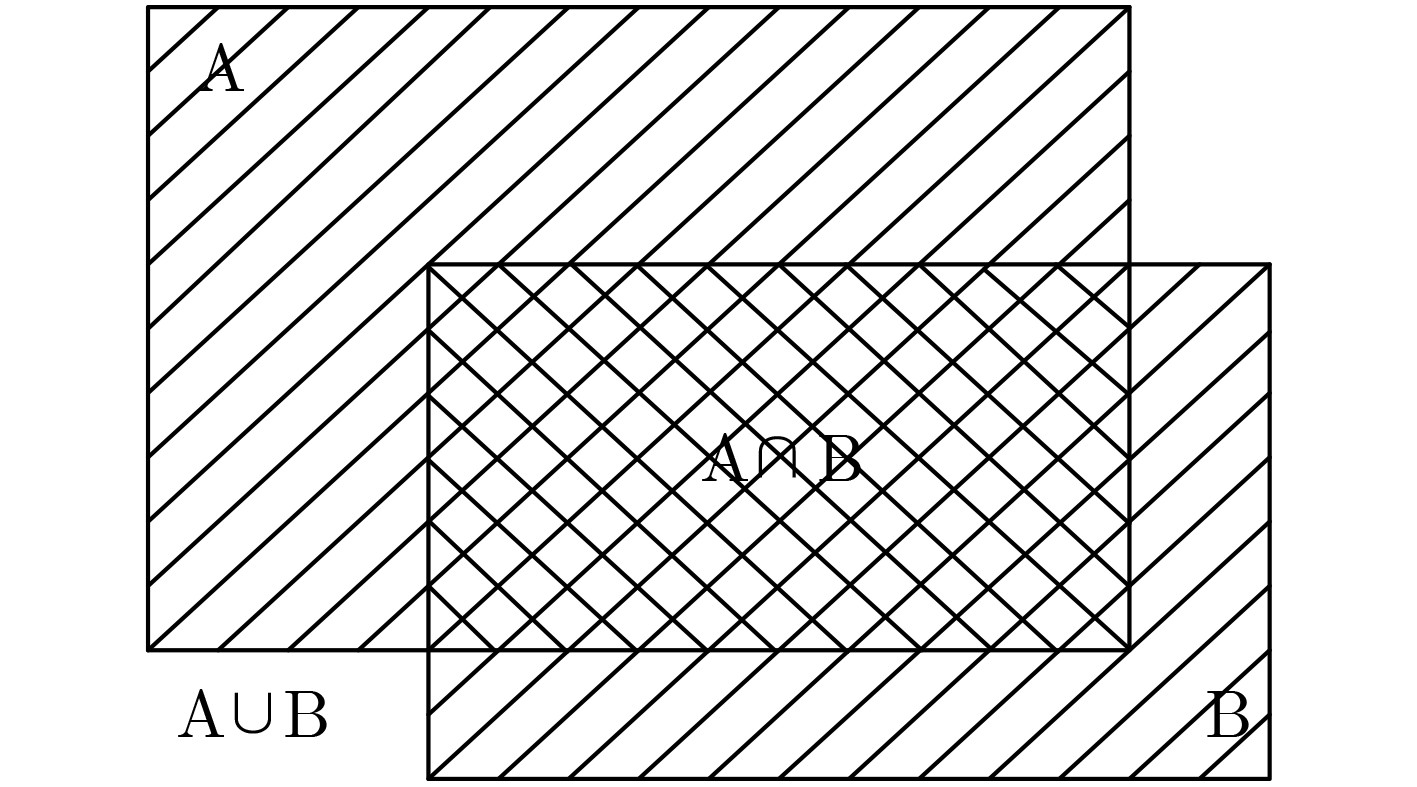
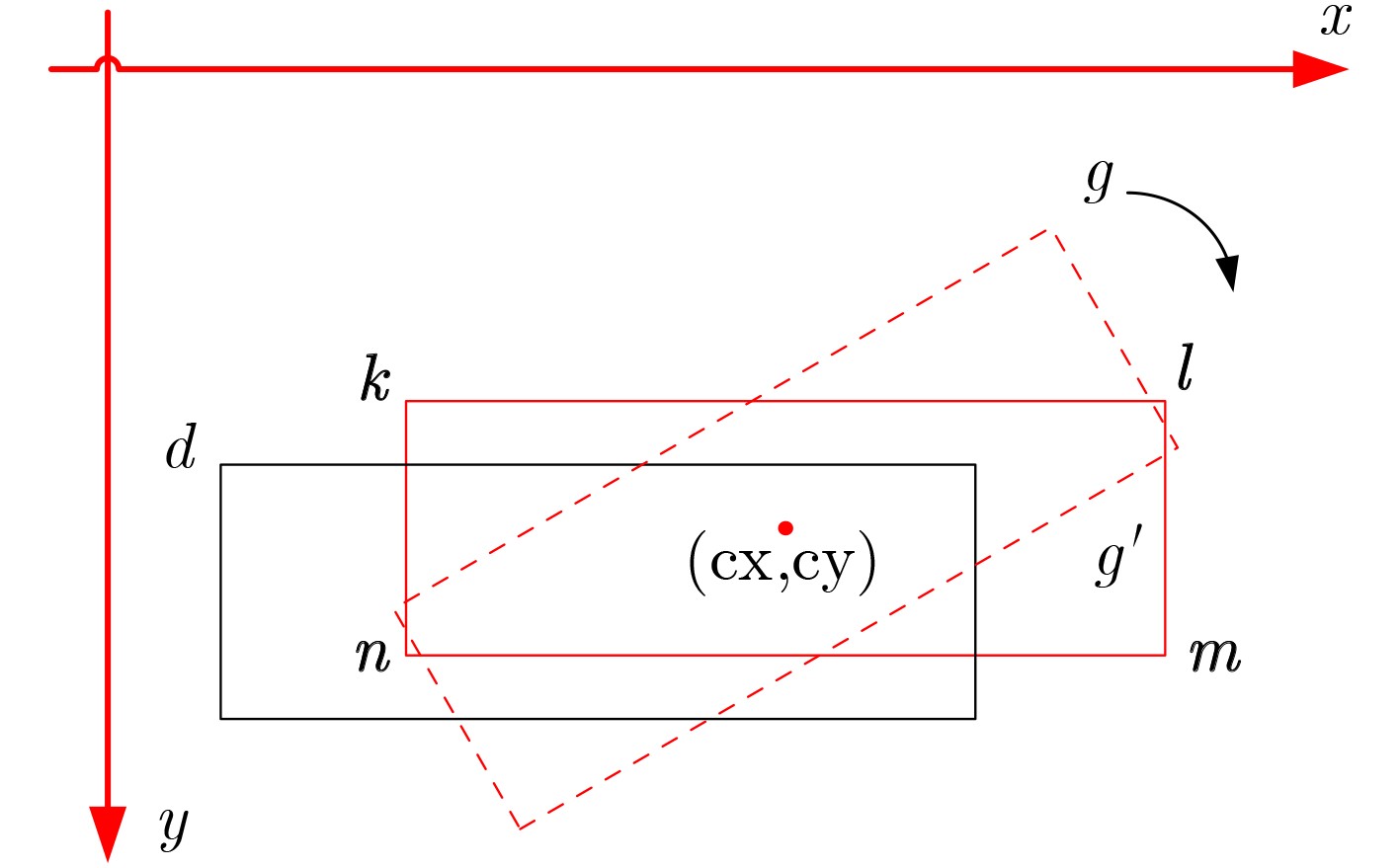
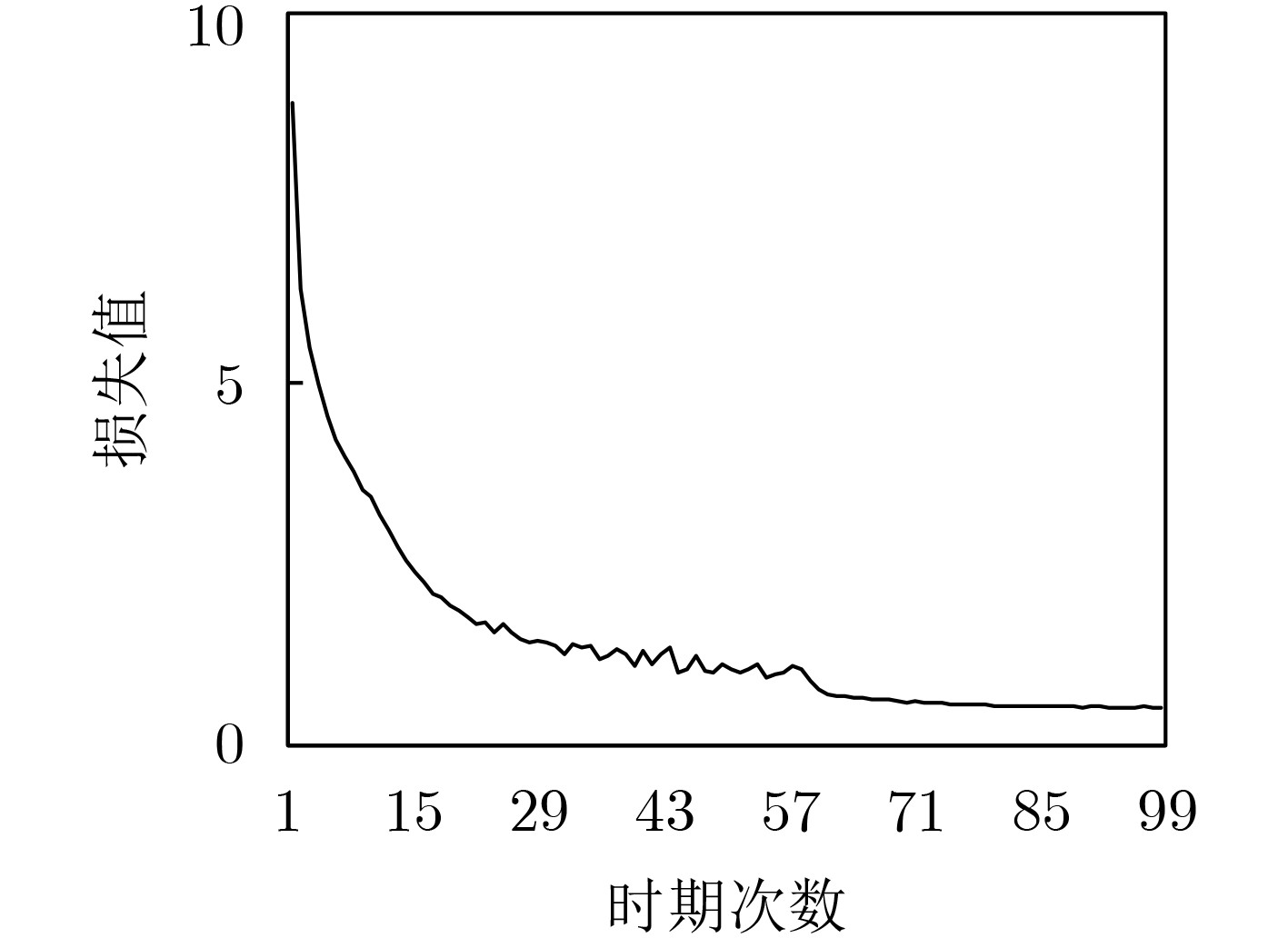
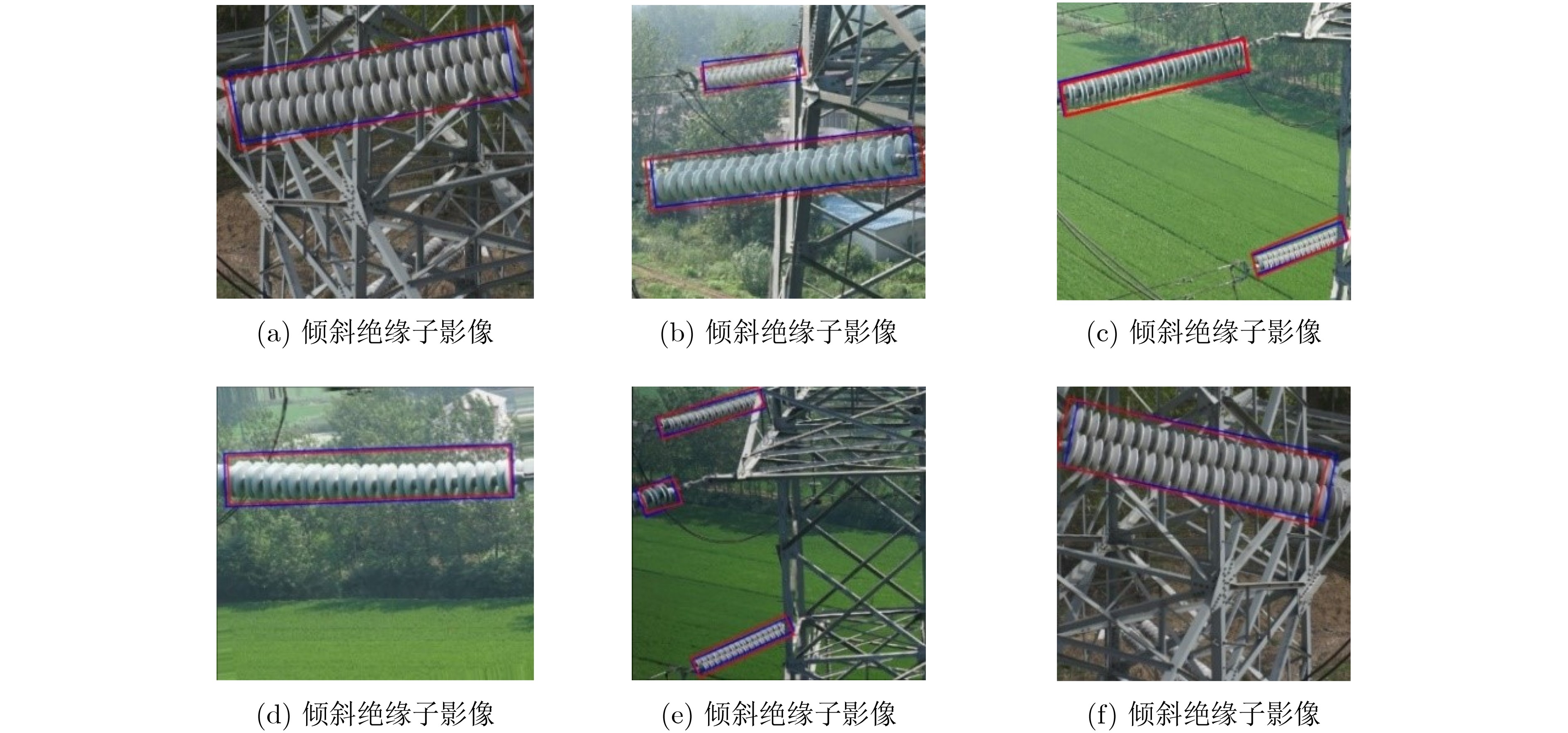
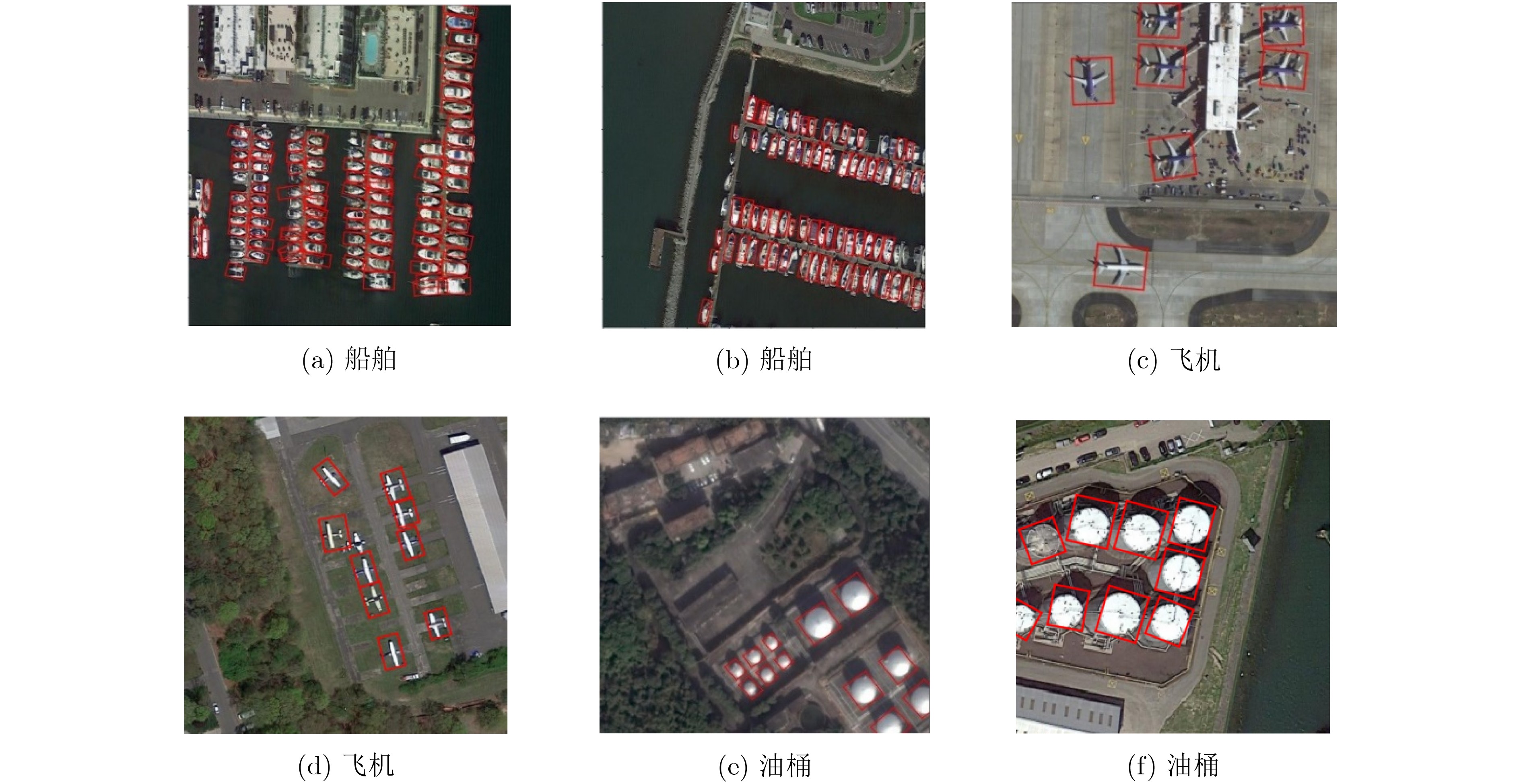
为了解决绝缘子目标检测中无法精确定位的问题,该文基于深度学习提出一种绝缘子定向识别算法,通过在轴对齐检测框中加入角度信息,可有效解决常规深度学习算法无法精确定位目标的问题。该算法首先将角度旋转参数引入轴对齐矩形检测框中构成定向检测框,然后将该参数偏移量作为第5参数加入到损失函数中进行迭代回归,同时为提高检测精度在训练过程中使用Adam算法替代随机梯度下降(SGD)算法进行损失函数优化,最终可获得绝缘子定向检测模型。实验分析表明,加入旋转角度的定向检测框可有效对绝缘子目标进行精确定位。
Abstract:In order to solve the problem of inaccurate location in insulator target detection, this paper proposes an insulator orientation recognition algorithm based on deep learning. By adding angle information to the axis alignment detection frame, it can effectively solve the problem that conventional deep learning algorithm can not accurately locate the target. First, the angular rotation parameters are introduced into the axially aligned rectangular detection frame to form a directional detection frame. Then the parameter offset is added as the fifth parameter to the loss function for iterative regression. At the same time, in order to improve the detection accuracy, Adam algorithm is used to replace Stochastic Gradient Descent (SGD) to optimize the loss function. Finally, the insulator directional detection model can be obtained. The experimental results show that the orientation detection frame with rotation angle can effectively locate the insulator target accurately.
-
Key words:
- Directional recognition /
- Insulator /
- Deep learning /
- Angle rotation
-
BARTON J P and INFIELD D G. Energy storage and its use with intermittent renewable energy[J]. IEEE Transactions on Energy Conversion, 2004, 19(2): 441–448. doi: 10.1109/tec.2003.822305 WANG Jiafu, LIANG Xidong, and GAO Yanfeng. Failure analysis of decay-like fracture of composite insulator[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2014, 21(6): 2503–2511. doi: 10.1109/tdei.2014.004485 GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. 2014 IEEE Conference on Computer Vision and Pattern Recogni-tion, Columbus, USA, 2014: 580–587. GIRSHICK R. Fast R-CNN[C]. 2015 IEEE International Conference on Computer Vision. Santiago, Chile, 2015: 1440–1448. doi: 10.1109/ICCV.2015.169. REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[C]. The 28th Interna-tional Conference on Neural Information Processing Systems, Montreal, Canada, 2015: 91–99. HE Kaiming, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]. 2017 IEEE International Conference on Computer Vision, Venice, Italy, 2017: 2980–2988. doi: 10.1109/ICCV.2017.322. REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 779–788. doi: 10.1109/CVPR.2016.91. REDMON J and FARHADI A. YOLO9000: Better, faster, stronger[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6517–6525. REDMON J and FARHADI A. Yolov3: An incremental improvement[J]. arXiv:1804.02767, 2018. LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]. The 14th European Conference on Computer Vision, Amsterdam, the Netherlands, 2016: 21–37. doi: 10.1007/978-3-319-46448-0_2. FU Chengyang, LIU Wei, RANGA A, et al. DSSD: Deconvolutional single shot detector[J]. arXiv:1701.06659, 2017. 陈庆, 闫斌, 叶润, 等. 航拍绝缘子卷积神经网络检测及自爆识别研究[J]. 电子测量与仪器学报, 2017, 31(6): 942–953. doi: 10.13382/j.jemi.2017.06.018CHEN Qing, YAN Bin, YE Run, et al. Insulator detection and recognition of explosion fault based on convolutional neural networks[J]. Journal of Electronic Measurement and Instrumentation, 2017, 31(6): 942–953. doi: 10.13382/j.jemi.2017.06.018 LING Zenan, QIU R C, JIN Zhijian, et al. An accurate and real-time self-blast glass insulator location method based on faster R-CNN and U-net with aerial images[J]. arXiv:1801.05143, 2018. RONNEBERGER O, FISCHER P, and BROX T. U-net: Convolutional networks for biomedical image segmentation[C]. The 18th International Conference on Medical Image Computing and Computer-assisted Intervention, Munich, Germany, 2015: 234–241. ZHAO Zhenbing, FAN Xiaoqing, XU Guozhi, et al. Aggregating deep convolutional feature maps for insulator detection in infrared images[J]. IEEE Access, 2017, 5: 21831–21839. doi: 10.1109/ACCESS.2017.2757030 陈文贺, 李彩林, 袁斌, 等. 有效的绝缘子自爆缺陷定位方法[J]. 计算机工程与设计, 2019, 40(8): 2346–2352. doi: 10.16208/j.issn1000-7024.2019.08.041CHEN Wenhe, LI Cailin, YUAN Bin, et al. Effective method to locate the self-explosion defect of insulators[J]. Computer Engineering and Design, 2019, 40(8): 2346–2352. doi: 10.16208/j.issn1000-7024.2019.08.041 黄新波, 刘新慧, 张烨, 等. 基于红蓝色差和改进K-means算法的航拍绝缘子分类识别方法[J]. 高电压技术, 2018, 44(5): 1528–1534. doi: 10.13336/j.1003-6520.hve.20180430018HUANG Xinbo, LIU Xinhui, ZHANG Ye, et al. Classi-fication recognition method of insulator in aerial image based on the red-blue difference and developed K-means algorithm[J]. High Voltage Engineering, 2018, 44(5): 1528–1534. doi: 10.13336/j.1003-6520.hve.20180430018 CHEN Chaoyue, GONG Weiguo, HU Yan, et al. Learning oriented region-based convolutional neural networks for building detection in satellite remote sensing images[C]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Han-nover, Germany, 2017: 461–464. doi: 10.5194/isprs-archives-XLII-1-W1-461-2017. DENG Zhipeng, SUN Hao, ZHOU Shilin, et al. Toward fast and accurate vehicle detection in aerial images using coupled region-based convolutional neural networks[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(8): 3652–3664. doi: 10.1109/JSTARS.2017.2694890 HE Tong, HUANG Weilin, QIAO Yu, et al. Accurate text localization in natural image with cascaded convolutional text network[J]. arXiv:1603.09423, 2016. YAO Cong, BAI Xiang, SANG Nong, et al. Scene text detection via holistic, multi-channel prediction[J]. arXiv:1606.09002, 2016. ZHANG Zheng, ZHANG Chengquan, SHEN Wei, et al. Multi-oriented text detection with fully convolutional networks[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 4159–4167. doi: 10.1109/CVPR.2016.451. LONG J, SHELHAMER E, DARRELL T. Fully convolu-tional networks for semantic segmentation[C]. 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, USA, 2015: 3431–3440. doi: 10.1109/CVPR.2015.7298965. MA Jianqi, SHAO Weiyuan, Ye Hao, et al. Arbitrary-oriented scene text detection via rotation proposals[J]. IEEE Transactions on Multimedia, 2018, 20(11): 3111–3122. doi: 10.1109/TMM.2018.2818020 TANG Tianyu, ZHOU Shilin, DENG Zhipeng, et al. Arbitrary-oriented vehicle detection in aerial imagery with single convolutional neural networks[J]. Remote Sensing, 2017, 9(11): 1170–1186. doi: 10.3390/rs9111170 LIU Lei, PAN Zongxu, LEI Bin. Learning a rotation invariant detector with rotatable bounding box[J]. arXiv:1711.09405, 2017. ZHAO Zhenbing, LIU Ning, and WANG Le. Localization of multiple insulators by orientation angle detection and binary shape prior knowledge[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2015, 22(6): 3421–3428. doi: 10.1109/tdei.2015.004741 KINGMA D P and BA J. Adam: A method for stochastic optimization[J]. arXiv:1412.6980, 2014. DAI Jifeng, LI Yi, HE Kaiming, et al. R-FCN: Object detection via region-based fully convolutional net-works[C]. The 30th International Con-ference on Neural Information Processing systems, Bar-celona, Spain, 2016: 379–387. -

 下载:
下载:






计量
- 文章访问数: 3819
- HTML全文浏览量: 1496
- PDF下载量: 183
- 被引次数: 0
