

Deep Convolutional Neural Network for Parking Space Occupancy Detection Based on Non-local Operation
-
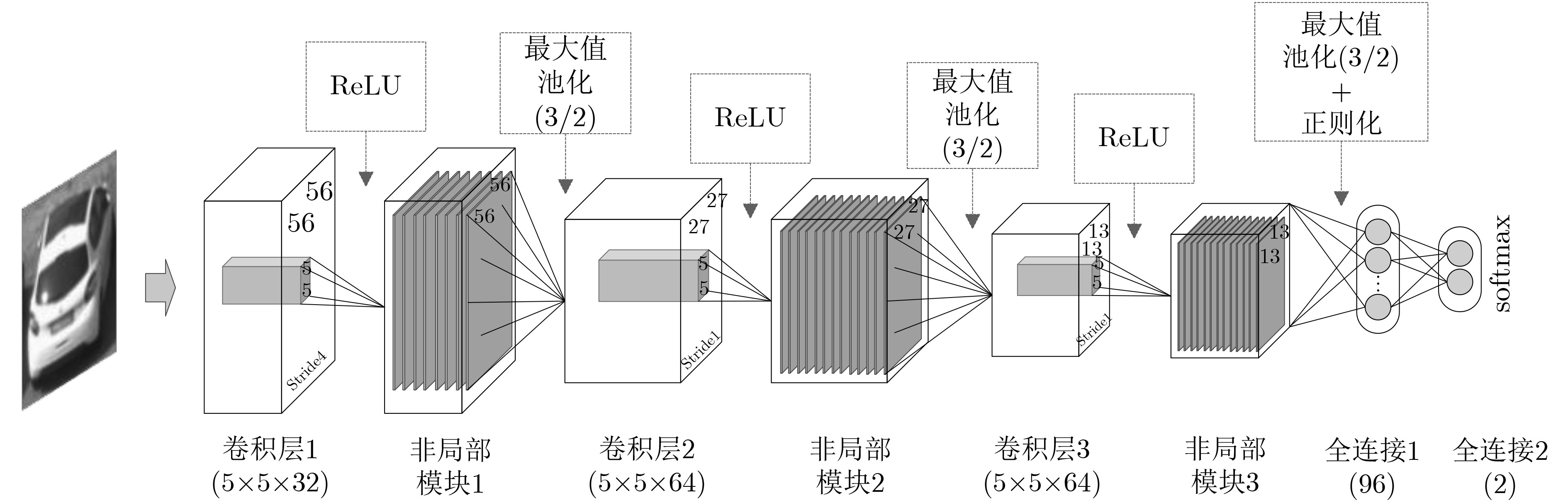
摘要: 随着城市交通智能化发展,准确高效地获取可用车位对于解决日益严峻的停车难问题至关重要。该文提出一种基于非局部操作的深度卷积神经网络车位占用检测算法。针对停车位图像特性,引入非局部操作,度量远距离像素间的相似性,直接获取边缘高频特征;使用小卷积核获取局部细节特征;以端到端的方式训练网络。实验中,通过设置不同卷积核尺寸和非局部模块层数,优化网络结构。实验结果表明,该文所提算法与传统的基于纹理特征的车位占用检测算法相比,无论在预测精度还是模型的泛化性能,均具有显著的优势。与当前广泛应用的基于局部特征提取的卷积神经网络相比,该算法具有较大的优势。在真实场景中,该算法同样具有较高精度,具备实际应用价值。Abstract: With the intelligent development of urban traffic, accurate and efficient access to available parking spaces is essential to solve the increasingly difficult problem of parking difficulties. Therefore, this paper proposes a deep convolutional neural network parking occupancy detection algorithm based on non-local operation. For the image characteristics of parking spaces, non-local operations are introduced, the similarity between distant pixels is measured, and the high-frequency features of the edges are directly obtained. The local details are obtained by using small convolution kernels, and the network is trained in an end-to-end manner. In the experiment, the network structure is optimized by setting different convolution kernel sizes and non-local module layers. The experimental results show that compared with the traditional texture feature-based parking space occupancy detection algorithm, the proposed algorithm has significant advantages in both prediction accuracy and generalization performance of the model. At the same time, compared with the currently widely used convolutional neural network based on local feature extraction, the algorithm also has great advantages. In real scenes, the algorithm also has high precision and has practical application value.
-
表 1 不同卷积核尺寸的准确率详细对比(%)
卷积核尺寸 训练精度 测试精度 UFPR04 UFPR05 PUCPR 3 99.97 99.74 96.40 97.48 5 99.90 99.78 97.67 97.85 7 99.56 99.72 96.00 96.78 9 99.44 99.41 94.81 96.38 11 99.41 99.25 92.18 95.39  下载: 导出CSV
下载: 导出CSV
表 2 不同层数非局部模块的准确率详细对比(%)
非局部模块层数 训练精度 测试精度 UFPR04 UFPR05 PUCPR 1 99.90 99.78 97.67 97.85 2 99.96 99.81 97.65 97.55 3 99.95 99.85 98.55 98.35
下载: 导出CSV
表 3 不同方法的PKLot子数据集内测试准确率(%)
训练集 UFPR04 UFPR05 PUCPR 测试集 UFPR04 UFPR05 PUCPR 本文方法 99.85 99.62 99.92 mAlexnet 99.54 99.49 99.90 LPQu 99.50 98.90 99.58 Mean 99.64 99.30 99.61
下载: 导出CSV
表 4 不同方法的PKLot子数据集间测试准确率(%)
训练集 测试集 方法 精度 UFPR04 UFPR05 本文方法 98.55 mAlexnet[14] 93.29 LPQg[18] 84.92 Max 88.33 PUCPR 本文方法 98.31 mAlexnet[14] 98.27 LPQg[18] 84.25 Mean 88.40 UFPR05 UFPR04 本文方法 94.45 mAlexnet[14] 93.69 LPQg[18] 85.76 Mean 85.53 PUCPR 本文方法 95.87 mAlexnet[14] 92.72 LPQu[17] 87.74 Mean 89.83 PUCPR UFPR04 本文方法 99.24 mAlexnet[14] 98.03 LPQg[18] 87.15 Mean 88.88 UFPR05 本文方法 98.89 mAlexnet[14] 96.00 LBPri[19] 82.78 Mean 84.20
下载: 导出CSV
-
CAICEDO F, BLAZQUEZ C, and MIRANDA P. Prediction of parking space availability in real time[J]. Expert Systems with Applications, 2012, 39(8): 7281–7290. doi: 10.1016/j.eswa.2012.01.091 DEL POSTIGO C G, TORRES J, and MENÉNDEZ J M. Vacant parking area estimation through background subtraction and transience map analysis[J]. IET Intelligent Transport Systems, 2015, 9(9): 835–841. doi: 10.1049/iet-its.2014.0090 DAN N. Parking management system and method[P]. US, 20030144890, 2003. TSAI L W, HSIEH J W, and FAN K C. Vehicle detection using normalized color and edge map[J]. IEEE Transactions on Image Processing, 2007, 16(3): 850–864. doi: 10.1109/tip.2007.891147 HUANG C C, TAI Yushu, and WANG S J. Vacant parking space detection based on plane-based Bayesian hierarchical framework[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2013, 23(9): 1598–1610. doi: 10.1109/tcsvt.2013.2254961 DELIBALTOV D, WU Wencheng, LOCE R P, et al. Parking lot occupancy determination from lamp-post camera images[C]. The 16th International IEEE Conference on Intelligent Transportation Systems, The Hague, Netherlands, 2013: 2387–2392. doi: 10.1109/itsc.2013.6728584. LECUN Y, BENGIO Y, and HINTON G E. Deep learning[J]. Nature, 2015, 521(7553): 436–444. doi: 10.1038/nature14539 DE ALMEID P R L, OLIVEIRA L S, BRITTO JR A S, et al. PKLot–a robust dataset for parking lot classification[J]. Expert Systems with Applications, 2015, 42(11): 4937–4949. doi: 10.1016/j.eswa.2015.02.009 AMATO G, CARRARA F, FALCHI F, et al. Car parking occupancy detection using smart camera networks and deep learning[C]. 2016 IEEE Symposium on Computers and Communication, Messina, Italy, 2016: 1212–1217. doi: 10.1109/iscc.2016.7543901. BUADES A, COLL B, and MOREL J M. A non-local algorithm for image denoising[C]. 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, USA, 2005: 60–65. doi: 10.1109/cvpr.2005.38. VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. The 31st Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 5998–6008. WANG Xiaolong, GIRSHICK R, GUPTA A, et al. Non-local neural networks[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 7794–7803. doi: 10.1109/cvpr.2018.00813. HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770–778. doi: 10.1109/cvpr.2016.90. AMATO G, CARRARA F, FALCHI F, et al. Deep learning for decentralized parking lot occupancy detection[J]. Expert Systems with Applications, 2017, 72: 327–334. doi: 10.1016/j.eswa.2016.10.055 KRIZHEVSKY A, SUTSKEVER I, and HINTON G E. ImageNet classification with deep convolutional neural networks[C]. The 25th International Conference on Neural Information Processing Systems, Red Hook, USA, 2012: 1097–1105. NURULLAYEV S and LEE S W. Generalized parking occupancy analysis based on dilated convolutional neural network[J]. Sensors, 2019, 19(2): 277. doi: 10.3390/s19020277 OJANSIVU V and HEIKKILÄ J. Blur insensitive texture classification using local phase quantization[C]. The 3rd International Conference on Image and Signal Processing, Cherbourg-Octeville, France, 2008: 236–243. doi: 10.1007/978-3-540-69905-7_27. RAHTU E, HEIKKILA J, OJANSIVU V, et al. Local phase quantization for blur-insensitive image analysis[J]. Image and Vision Computing, 2012, 30(8): 501–512. doi: 10.1016/j.imavis.2012.04.001 OJALA T, PIETIKAINEN M, and MAENPAA T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7): 971–987. doi: 10.1109/tpami.2002.1017623 -


 下载:
下载:








图(8) / 表(4)
计量
- 文章访问数: 2605
- HTML全文浏览量: 1159
- PDF下载量: 109
- 被引次数: 0
