

Stochastic Resonance Detection Method for the Dual-Sequence Frequency Hopping Signal under Extremely Low Signal-to-Noise Radio
-
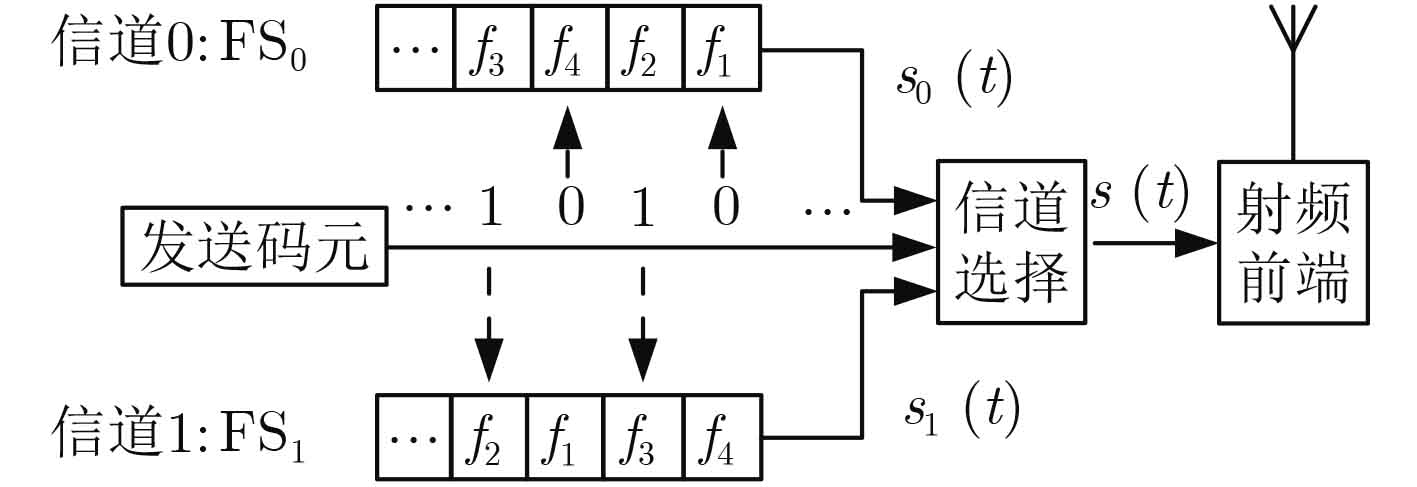
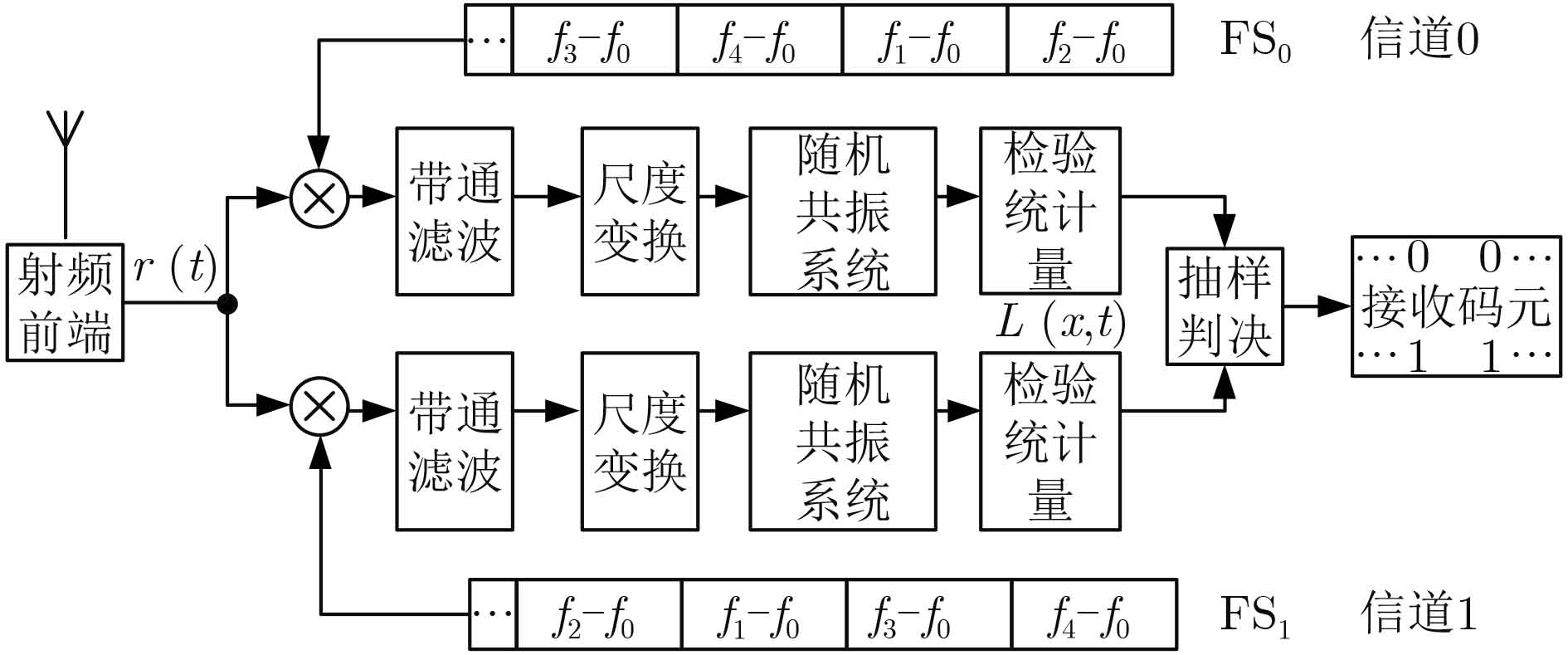
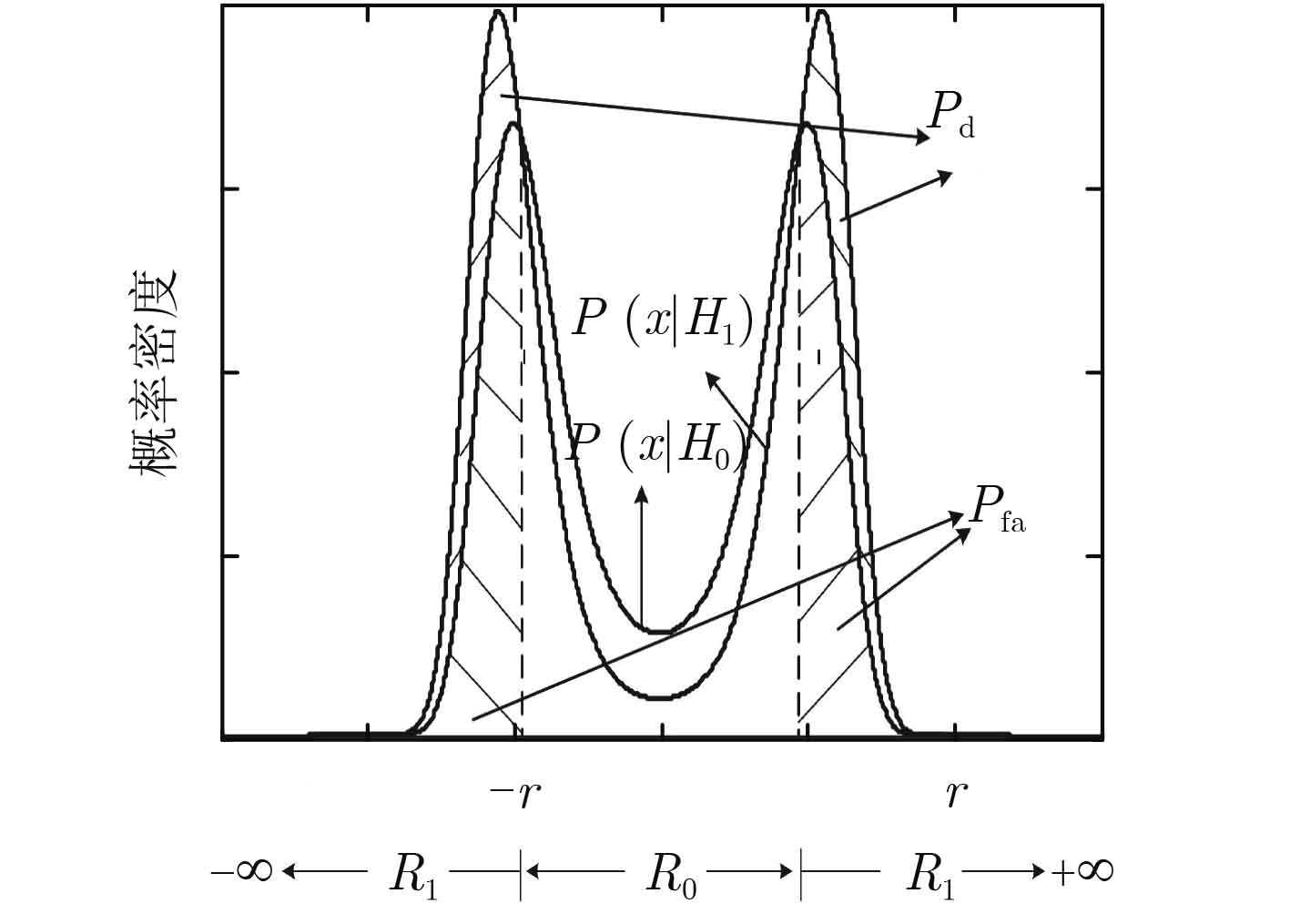
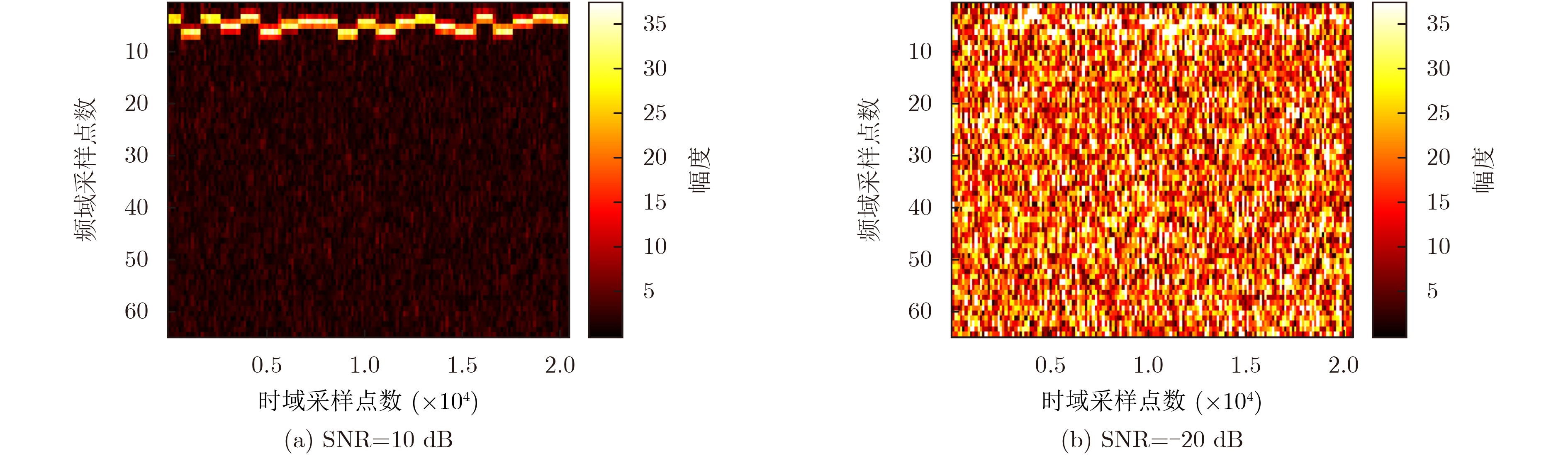
摘要: 针对对偶序列跳频(DSHF)在极低信噪比(SNR)下无法通信的问题,该文充分利用对偶序列跳频信号时、频域物理特征,提出一种随机共振(SR)检测方法,极大扩展该信号的应用场景。首先,通过分析对偶序列跳频的发射、接收信号及超外差解调的中频(IF)信号,构建随机共振系统,采用尺度变换调整中频信号;然后,引入判决时刻,将无定态解的非自治福克普朗克方程(FPE)转化为可解的自治方程,从而推导出含时间参量的概率密度周期定态解;其次,以最大后验概率为准则,得到检测概率、虚警概率和接收机工作特性(ROC)曲线;最后,得出以下结论:(1) 应用匹配随机共振检测对偶序列跳频信号的信噪比最低可达–18 dB;(2)对偶序列跳频与匹配随机共振结合,适用于信噪比在–18~–14 dB的信号检测;(3)应用匹配随机共振检测对偶序列跳频信号在信噪比为–14 dB时,检测性能提升了25.47%。仿真实验验证了理论的正确性。Abstract: Considering the problem that the Dual-Sequence Frequency Hopping (DSFH) can not communicate at extremely low Signal-to-Noise Ratio (SNR), a Stochastic Resonance (SR) detection method is proposed. The SR takes full advantage of the physical characteristics of DSFH signal to improve the detection performance. Firstly, the SR is constructed by analyzing signals of transmission, reception and the Intermediate Frequency (IF). The scale transaction is used to adjust the IF signal to fit the SR. Secondly, the non-autonomous Fokker-Plank Equation (FPE) is transformed into an autonomous equation by introducing the decision time. Therefore, the analytical solution of the probability density function with the parameter of decision time is obtained. Finally, the detection probability, false alarm probability and Receiver Operating Characteristics (ROC) curve are obtained, when the criterion is the Maximum A Posterior probability (MAP). Simulation analysis results show three conclusions: (1) The SNR of DSFH signal can be as low as –18 dB, which uses the matched SR detection. (2) Method for combining DSFH with the matched SR is suitable to detect the signals with SNR of –18 ~–14 dB. (3) In the case of –14 dB SNR, the DFSH signal detection performance increases by 25.47%, when using SR. The proposed method effectiveness is proved with simulation results.
-
FITZEK F H P. The medium is the message[C]. 2006 IEEE International Conference on Communications, Istanbul, Turkey, 2006: 5016–5021. ZHOU Xin, KYRITSI P, EGGERS P C F, et al. "The medium is the message": Secure communication via waveform coding in MIMO systems[C]. The 65th Vehicular Technology Conference-VTC2007-Spring, Dublin, Ireland, 2007: 491–495. QUAN Houde, ZHAO Huan, and CUI Peizhang. Anti-jamming frequency hopping system using multiple hopping patterns[J]. Wireless Personal Communications, 2015, 81(3): 1159–1176. doi: 10.1007/s11277-014-2177-1 赵寰, 全厚德, 崔佩璋. 抗跟踪干扰的多序列跳频无线通信系统[J]. 系统工程与电子技术, 2015, 37(3): 671–678. doi: 10.3969/j.issn.1001-506X.2015.03.31ZHAO Huan, QUAN Houde, and CUI Peizhang. Follower-jamming resistible multi-sequence frequency hopping wireless communication[J]. Systems Engineering and Electronics, 2015, 37(3): 671–678. doi: 10.3969/j.issn.1001-506X.2015.03.31 BENZI R, SUTERA A, and VULPIANI A. The mechanism of stochastic resonance[J]. Journal of Physics A: Mathematical and General, 1981, 14(11): L453–L457. doi: 10.1088/0305-4470/14/11/006 张刚, 宋莹, 张天骐. Levy噪声驱动下指数型单稳系统的随机共振特性分析[J]. 电子与信息学报, 2017, 39(4): 893–900. doi: 10.11999/JEIT160579ZHANG Gang, SONG Ying, and ZHANG Tianqi. Characteristic analysis of exponential type monostable stochastic resonance under levy noise[J]. Journal of Electronics &Information Technology, 2017, 39(4): 893–900. doi: 10.11999/JEIT160579 王珊, 王辅忠. 基于自适应随机共振理论的太赫兹雷达信号检测方法[J]. 物理学报, 2018, 67(16): 160502. doi: 10.7498/aps.67.20172367WANG Shan and WANG Fuzhong. Adaptive stochastic resonance system in Terahertz radar signal detection[J]. Acta Physica Sinica, 2018, 67(16): 160502. doi: 10.7498/aps.67.20172367 KRAUSS P, METZNER C, SCHILLING A, et al. Adaptive stochastic resonance for unknown and variable input signals[J]. Scientific Reports, 2017, 7(1): 2450. doi: 10.1038/s41598-017-02644-w CHEN Hao, VARSHNEY L R, and VARSHNEY P K. Noise-enhanced information systems[J]. Proceedings of the IEEE, 2014, 102(10): 1607–1621. doi: 10.1109/JPROC.2014.2341554 CHEN Hao, VARSHNEY P K, KAY S M, et al. Theory of the stochastic resonance effect in signal detection: Part I—Fixed detectors[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3172–3184. doi: 10.1109/TSP.2007.893757 CHEN Hao and VARSHNEY P K. Theory of the stochastic resonance effect in signal detection—Part II: Variable detectors[J]. IEEE Transactions on Signal Processing, 2008, 56(10): 5031–5041. doi: 10.1109/TSP.2008.928509 ZHANG Gang, ZHANG Yijun, ZHANG Tianqi, et al. Stochastic resonance in second-order underdamped system with exponential Bistable potential for bearing fault diagnosis[J]. IEEE Access, 2018, 6: 42431–42444. doi: 10.1109/ACCESS.2018.2856620 李海霞, 任勇峰, 杨玉华, 等. 跳频信号的迭代随机共振解调算法[J]. 系统仿真学报, 2018, 30(1): 341–347. doi: 10.16182/j.issn1004731x.joss.201801045LI Haixia, REN Yongfeng, YANG Yuhua, et al. Iterative stochastic resonance demodulation algorithm of frequency-hopping signal[J]. Journal of System Simulation, 2018, 30(1): 341–347. doi: 10.16182/j.issn1004731x.joss.201801045 WANG Jun, REN Xin, ZHANG Shaowen, et al. Adaptive bistable stochastic resonance aided spectrum sensing[J]. IEEE Transactions on Wireless Communications, 2014, 13(7): 4014–4024. doi: 10.1109/TWC.2014.2317779 胡岗. 随机力与非线性系统[M]. 上海: 上海科技教育出版社, 1994: 222–232.HU Gang. Stochastic Forces and Nonlinear Systems[M]. Shanghai: Shanghai Scientific and Technological Education Publishing House, 1994: 222–232. KANG Yanmei. Simulating transient dynamics of the time-dependent time fractional Fokker-Planck systems[J]. Physics Letters A, 2016, 380(39): 3160–3166. doi: 10.1016/j.physleta.2016.07.049 IKOTA R. Approximation to a Fokker-Planck equation for the Brownian motor[J]. Physical Review E, 2018, 97(6): 062111. doi: 10.1103/PhysRevE.97.062111. 胡茑庆. 随机共振微弱特征信号检测理论与方法[M]. 北京: 国防工业出版社, 2012: 85–86.HU Niaoqing. Theory and Method of Detecting Weak Characteristic Signals of Stochastic Resonance[M]. Beijing: National Defend Industry Press, 2012: 85–86. -

 下载:
下载:




图(9)
计量
- 文章访问数: 3698
- HTML全文浏览量: 1038
- PDF下载量: 70
- 被引次数: 0
