

Improved Neural Network Enhanced Navigation System of Adaptive Unsented Kalman Filter
-
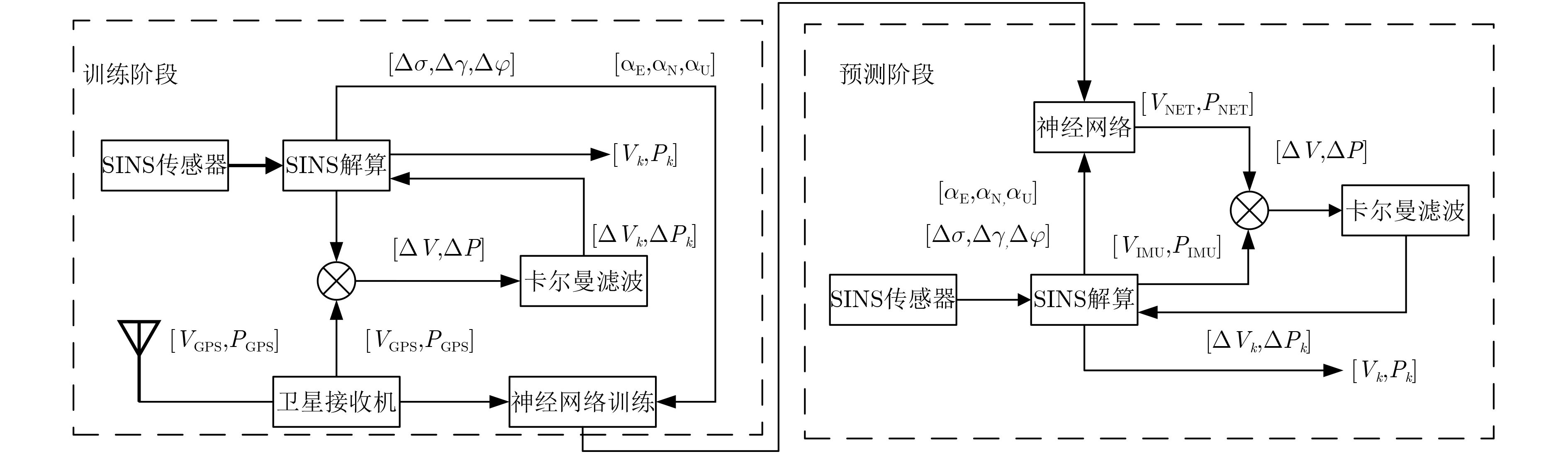
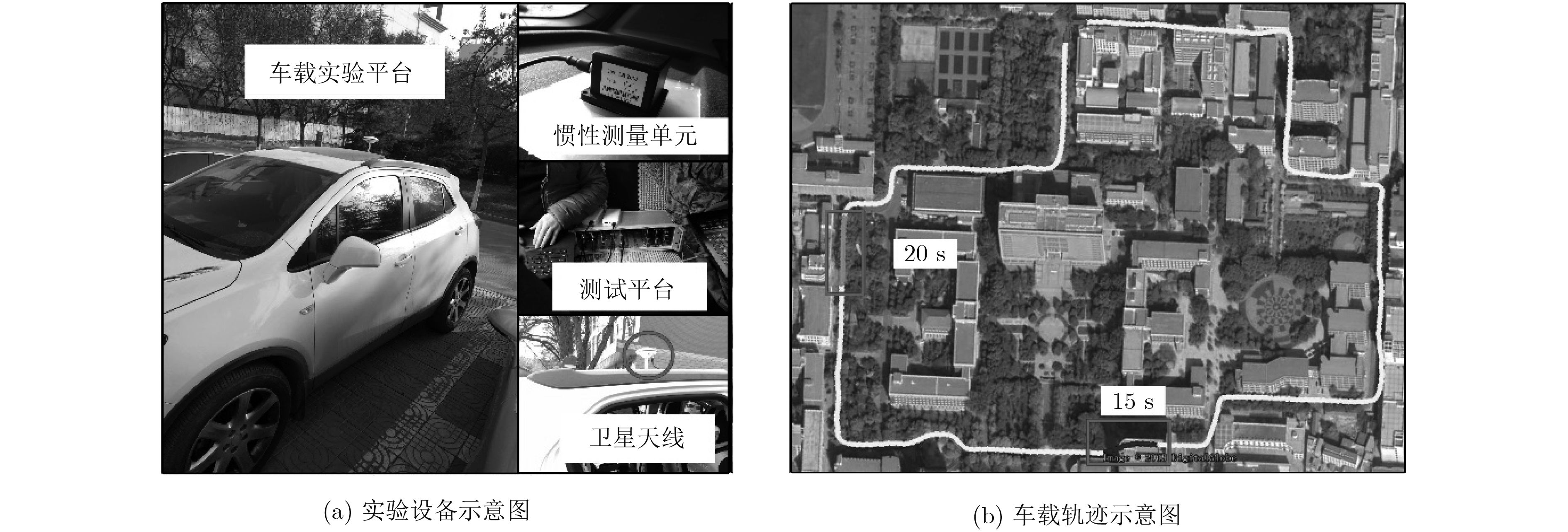
摘要: 基于微机电系统(MEMS)的惯性器件和全球定位系统(GPS)的组合导航系统在卫星信号失锁时存在误差发散的问题,该文提出一种基于人工蜂群算法(ABC)改进的径向基函数(RBF)神经网络增强改进的自适应无迹卡尔曼滤波算法(AUKF)。在GPS信号失锁的情况下利用训练好的神经网络输出预测信息来对捷联惯导系统进行误差校正。最后通过车载半实物仿真实验验证该方法的性能。实验结果表明该方法在失锁情况下对于捷联惯导系统的误差发散有较为明显的抑制效果。Abstract: In order to solve the problem of speed and position error divergence in the integrated navigation system based on MicroElectro Mechanical Systems (MEMS) inertial device and GPS system combined positioning, an improved Adaptive Unsecnted Kalman Filter (AUKF) enhanced by the Radial Basis Function(RBF) neural network based on Artificial Bee Colony(ABC) algorithm is proposed. When the GPS signal is out of lock, the trained network outputs predictied information to perform error correction on the Strapdown Inertial Navigation System(SINS). Finally, the performance of the method is verified by vehicle-mounted semi-physical simulation experiments. The experimental results show that the proposed method has a significant inhibitory effect on the error divergence of the strapdown inertial navigation system in the case of loss of lock.
-
表 1 传感器误差参数
性能指标 陀螺仪 加速度计 更新频率 分辨率 零偏 随机游走 分辨率 零偏 随机游走 参数 0.007°/s 0.007°/s 2.4°/(s·$\sqrt {{\rm{Hz}}} $) 0.3 mg 0.2 mg 0.2 mg/$\sqrt {{\rm{Hz}}} $ 100 Hz  下载: 导出CSV
下载: 导出CSV
表 2 仿真轨迹误差
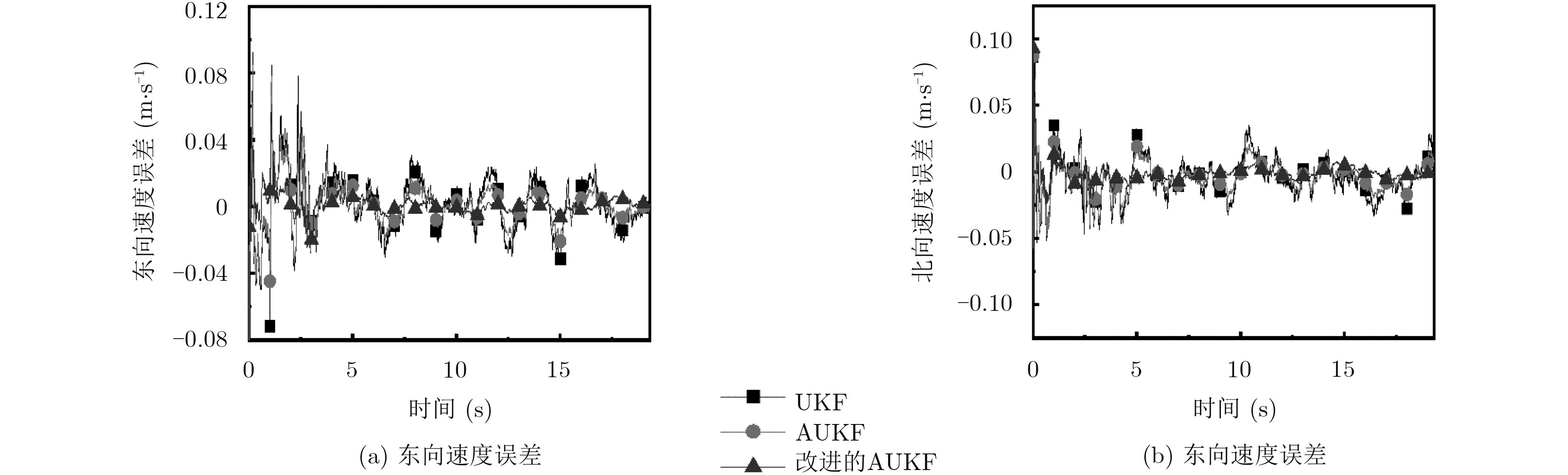
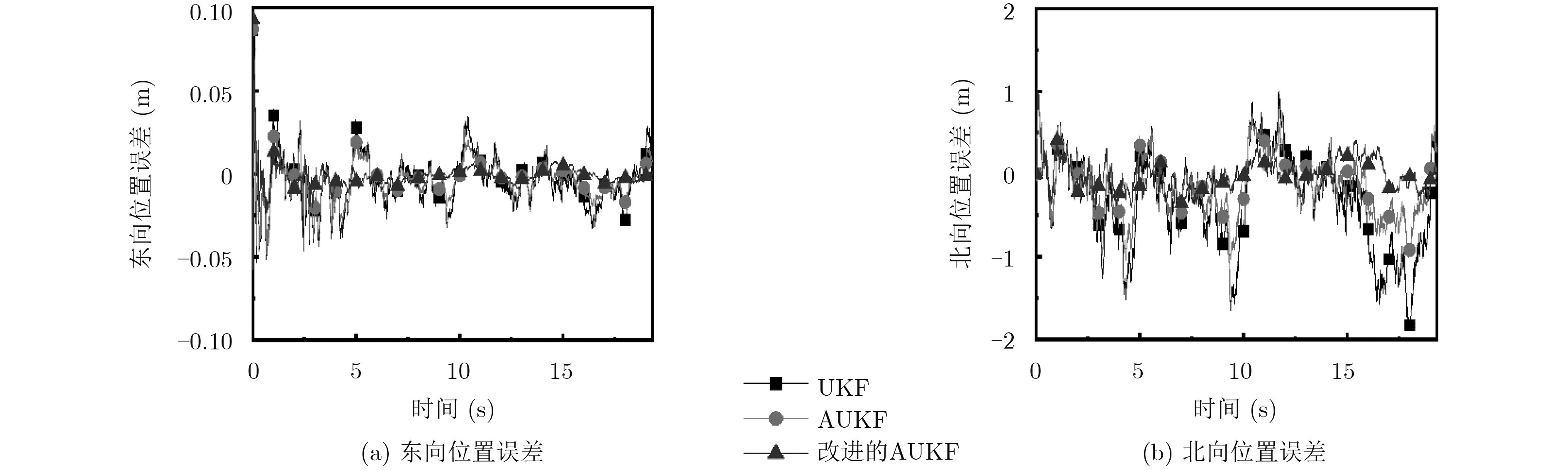
算法 东向速度(m/s) 北向速度(m/s) 东向位置(m) 北向位置(m) 均值 标准差 均值 标准差 均值 标准差 均值 标准差 UKF 0.0020 0.0176 –0.0051 0.0151 –0.0372 0.5383 –0.3385 0.5731 AUKF 0.0014 0.0133 –0.0045 0.0115 –0.0231 0.333 –0.1554 0.3662 改进的AUKF 0.0012 0.0062 –0.0016 0.0063 –0.017 0.1516 –0.0134 0.1901
下载: 导出CSV
表 3 失锁15 s误差对比
算法 东向速度 (m/s) 北向速度 (m/s) 东向位置 (m) 北向位置 (m) 最大误差 标准差 最大误差 标准差 最大误差 标准差 最大误差 标准差 SINS 6.8848 3.4896 17.1512 8.3593 48.1258 15.5383 113.5873 36.453 RBF/UKF 2.0323 0.6450 5.8072 2.5089 11.6579 1.0626 42.2483 19.0634 RBF/AUKF 1.1013 0.3399 4.0176 1.9044 6.2061 1.1394 30.6046 13.1792 ABC_RBF/AUKF 0.4931 0.1887 1.1604 0.5895 2.1414 0.7315 5.7511 2.2276
下载: 导出CSV
表 4 误差收敛幅度(%)
算法 东向速度 北向速度 东向位置 北向位置 最大误差 标准差 最大误差 标准差 最大误差 标准差 最大误差 标准差 RBF/UKF 70.48 81.52 66.14 69.99 75.78 93.16 62.81 50.47 RBF/AUKF 84.00 90.26 76.58 77.22 87.10 92.67 73.06 63.85 ABC_RBF/AUKF 92.84 94.59 93.24 92.95 95.50 95.29 94.94 93.90
下载: 导出CSV
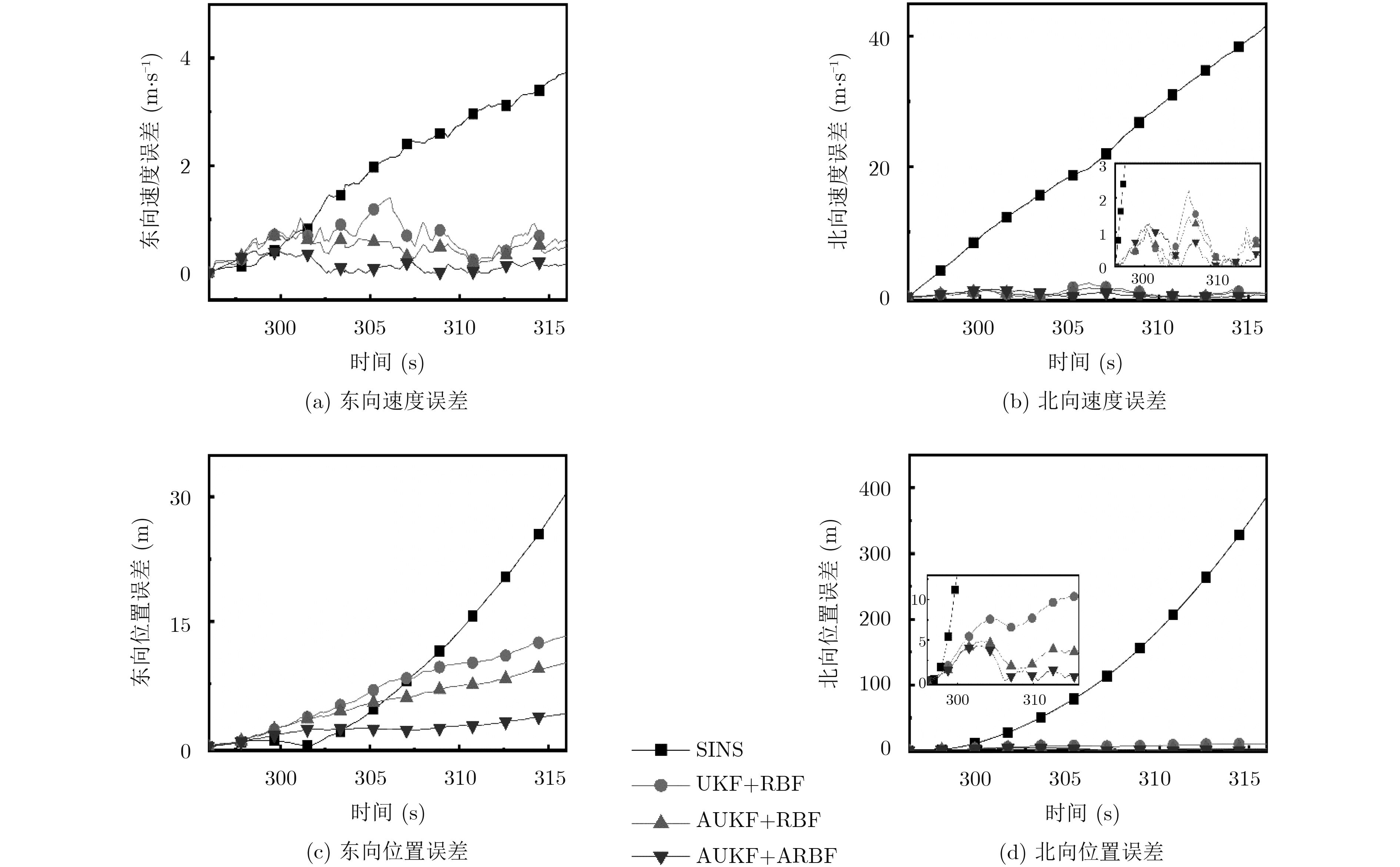
表 5 失锁20 s误差对比结果
算法 东向速度 (m/s) 北向速度 (m/s) 东向位置 (m) 北向位置 (m) 最大误差 标准差 最大误差 标准差 最大误差 标准差 最大误差 标准差 SINS 3.8304 1.9431 42.3022 21.2832 31.6512 9.5199 397.7599 131.2909 RBF/UKF 1.4031 0.6460 2.1983 0.6543 13.4591 6.9092 10.5738 6.545 RBF/AUKF 0.7504 0.4599 1.4436 0.5315 10.2079 5.3060 4.9074 2.8413 ABC_RBF/AUKF 0.4424 0.1527 1.4165 0.4434 4.6339 2.1145 4.3115 1.5682
下载: 导出CSV
表 6 误差收敛幅度对比(%)
算法 东向速度 北向速度 东向位置 北向位置 最大误差 标准差 最大误差 标准差 最大误差 标准差 最大误差 标准差 RBF/UKF 63.37 66.75 94.8 96.93 57.48 27.42 97.34 95.01 RBF/AUKF 80.41 76.33 96.59 97.52 67.75 44.26 98.77 97.84 ABC_RBF/AUKF 88.45 92.14 96.65 97.92 85.36 77.79 98.92 98.81
下载: 导出CSV
-
崔留争, 高思远, 贾宏光, 等. 神经网络辅助卡尔曼滤波在组合导航中的应用[J]. 光学精密工程, 2014, 22(5): 1304–1311.CUI Liuzheng, GAO Siyuan, JIA Hongguang, et al. Application of neural network aided Kalman filtering to SINS/GPS[J]. Optics and Precision Engineering, 2014, 22(5): 1304–1311. 刘昊, 陈光武, 魏宗寿, 等. 改进的最小二乘自适应滤波陀螺仪去噪方法[J]. 仪器仪表学报, 2018, 39(4): 107–114.LIU Hao, CHEN Guangwu, WEI Zongshou, et al. Gyro denoising method based on least squares adaptive filter[J]. Chinese Journal of Scientific Instrument, 2018, 39(4): 107–114. 王迪, 陈光武, 杨厅. 一种快速高精度GPS组合定位方法研究[J]. 铁道学报, 2017, 39(2): 67–73. doi: 10.3969/j.issn.1001-8360.2017.02.010WANG Di, CHEN Guangwu, and YANG Ting. Study on a fast and precision GPS integrated positioning method[J]. Journal of the China Railway Society, 2017, 39(2): 67–73. doi: 10.3969/j.issn.1001-8360.2017.02.010 ZHANG Quan and NIU Xiaoji. Research on accuracy enhancement of low-cost MEMS INS/GNSS integration for land vehicle navigation[C]. Proceedings of 2018 IEEE/ION Position, Location and Navigation Symposium, Monterey, USA, 2018: 891–898.doi: 10.1109/PLANS.2018.8373467. WANG Di, XU Xiaosu, and ZHU Yongyun. A novel hybrid of a fading filter and an extreme learning machine for GPS/INS during GPS outages[J]. Sensors, 2018, 18(11): 3863–3885. doi: 10.3390/s18113863 JIANG Zhuqing, LIU Chonghua, ZHANG Gong, et al. GPS/INS integrated navigation based on UKF and simulated annealing optimized SVM[C]. Proceedings of the 78th Vehicular Technology Conference, Las Vegas, USA, 2013: 1–5.doi: 10.1109/VTCFall.2013.6692217. NEEDHAM T G and BRAASCH M S. Impact of gravity modeling error on integrated GNSS/INS coasting performance[C]. Proceedings of 2017 IEEE/AIAA 36th Digital Avionics Systems Conference, St. Petersburg, 2017: 1–10.doi: 10.1109/DASC.2017.8102006. 高宗余, 李德胜. 神经网络在MEMS-IMU/GPS组合导航中的应用研究[J]. 传感技术学报, 2009, 22(9): 1356–1360. doi: 10.3969/j.issn.1004-1699.2009.09.028GAO Zongyu and LI Desheng. Study on application of neural network in MEMS-INS/GPS combination[J]. Chinese Journal of Sensors and Actuators, 2009, 22(9): 1356–1360. doi: 10.3969/j.issn.1004-1699.2009.09.028 刘卓凡, 杨凯, 王加详, 等. 基于ANFIS神经网络的GPS/INS组合导航信息融合[J]. 计算机测量与控制, 2012, 20(8): 2291–2293.LIU Zhuofan, YANG Kai, WANG Jiaxiang, et al. GPS/INS integrated navigation fusion algorithm based on ANFIS neural network[J]. Computer Measurement &Control, 2012, 20(8): 2291–2293. 孙佳兴, 张晓林, 侯冰. ABC优化BP神经网络算法在组合导航中的应用研究[J]. 遥测遥控, 2016, 37(5): 40–48. doi: 10.3969/j.issn.2095-1000.2016.05.008SUN Jiaxing, ZHANG Xiaolin, and HOU Bing. Application of ABC-based BP neural network in integrated navigation system[J]. Telemetry Remote Control, 2016, 37(5): 40–48. doi: 10.3969/j.issn.2095-1000.2016.05.008 胡高歌, 高社生, 赵岩. 一种新的自适应UKF算法及其在组合导航中的应用[J]. 中国惯性技术学报, 2014, 22(3): 357–361.HU Gaoge, GAO Shesheng, and ZHAO Yan. A novel adaptive UKF and its application in integrated navigation[J]. Journal of Chinese Inertial Technology, 2014, 22(3): 357–361. 江铭炎, 袁东风. 人工蜂群算法及其应用[M]. 北京: 科学出版社, 2014: 83–94.JIANG Mingyan and YUAN Dongfeng. Artificial Bee Colony Algorithm and its Application[M]. Beijing: Science Press, 2014: 83–94. 秦永元, 张洪钺, 汪淑华. 卡尔曼滤波与组合导航原理(第三版)[M]. 西安: 西北工业大学出版社, 2011: 221–231.QIN Yongyuan, ZHANG Hongyu, and WANG Shuhua. Kalman Filtering and Integrated Navigation Principles (Third Edition)[M]. Xi'an: Northwestern Polytechnical University Press, 2011: 221–231. 郭通, 兰巨龙, 李玉峰, 等. 基于量子自适应粒子群优化径向基函数神经网络的网络流量预测[J]. 电子与信息学报, 2013, 35(9): 2220–2226.GUO Tong, LAN Julong, LI Yufeng, et al. Network traffic prediction with radial basis function neural network based on quantum adaptive particle swarm optimization[J]. Journal of Electronics &Information Technology, 2013, 35(9): 2220–2226. 金瑶, 蔡之华, 梁丁文. 基于差分演化算法的自适应无迹卡尔曼滤波[J]. 电子与信息学报, 2013, 35(4): 838–843.JIN Yao, CAI Zhihua, and LIANG Dingwen. Adaptive unscented Kalman filter based on differential evolution algorithm[J]. Journal of Electronics &Information Technology, 2013, 35(4): 838–843. 岳哲, 廉保旺, 唐成凯. 基于加权自适应平方根容积卡尔曼滤波的GPS/INS组合导航方法[J]. 电子与信息学报, 2018, 40(3): 565–572. doi: 10.1999/JEIT170597YUE Zhe, LIAN Baowang, and TANG Chengkai. A GPS/INS integrated navigation method based on weighting adaptive square-root cubature Kalman filter[J]. Journal of Electronics &Information Technology, 2018, 40(3): 565–572. doi: 10.1999/JEIT170597 IANG Chen, ZHANG Shubi, and ZHANG Qiuzhao. A new adaptive h-infinity filtering algorithm for the GPS/INS integrated navigation[J]. Sensors, 2016, 16(12): 2127. doi: 10.3390/s16122127 NING Yipeng, WANG Jian, HAN Houzeng, et al. An optimal radial basis function neural network enhanced adaptive robust kalman filter for GNSS/INS integrated systems in complex urban areas[J]. Sensors, 2018, 18(9): 3091–3112. doi: 10.3390/s18093091 杨少凡, 余华兵, 陈新华, 等. 基于扩展Kalman滤波的单领航者自主水下航行器协同导航判别式训练方法研究[J]. 电子与信息学报, 2015, 37(11): 2756–2761. doi: 10.11999/JEIT150036YANG Shaofan, YU Huabing, CHEN Xinhua, et al. Discriminative training of Kalman filters based cooperative navigation for multiple autonomous underwater vehicles with a single leader[J]. Journal of Electronics &Information Technology, 2015, 37(11): 2756–2761. doi: 10.11999/JEIT150036 李江, 钱富才, 刘丁, 等. 具有未知参数的GPS/DR组合导航系统跟踪与辨识[J]. 电子与信息学报, 2013, 35(4): 921–926.LI Jiang, QIAN Fucai, LIU Ding, et al. Tracking and identification for GPS/DR integrated navigation system with unknown parameters[J]. Journal of Electronics &Information Technology, 2013, 35(4): 921–926. -

 下载:
下载:





图(8) / 表(6)
计量
- 文章访问数: 3299
- HTML全文浏览量: 1003
- PDF下载量: 87
- 被引次数: 0
