

A Satellite Calibration Method for the Baseline Coordinate and Phase Difference of Distributed Radar Array
-
摘要: 在采用相位干涉测角的分布式阵列雷达系统中,系统阵面相位中心位置误差和相位误差对测角精度影响很大,且阵面相位中心位置与物理中心位置通常不一致,因此需要对其进行精细标准补偿。传统的雷达系统误差校正方法通常采用远场辐射源来对雷达进行校正,但是对于单元间距很大的分布式阵列空间目标监视雷达而言,要实现远场辐射校准往往很难。该文提出一种利用多弧段的精轨卫星精密星历对阵面相位中心位置误差引起的相位误差进行白化,然后搜索相位中心坐标和相位差使匹配方差最小的校正方法,无需使用特定仪器测量,且能很好地标定误差;计算机仿真以及实测数据验证了使用该文校正方法后,测角精度得到了显著提升。Abstract: In the system of distributed radar array system using phase interference angle measurement, the phase center coordinate error of arrays and the phase difference error have relatively large influence on the angle measurement. The phase center position is often inconsistent with physical center position. Thus it is necessary to compensate these errors precisely. Far field radiation sources are often used to calibrate radar in traditional calibration methods. However, it is usually hard to achieve far field radiation sources for distributed radar array with large space between units surveilling space targets. In this paper, a calibration method based on the precise ephemeris of refined orbit satellites without measuring with special instruments is proposed. The phase error caused by coordinate error can be whitened by the precise ephemeris of multiple arcs, and the coordinate and phase difference will be searched out by matching the minimum variance. This method can get the errors easily. The simulation results and actual data verify that angle measurement accuracy gets large improvement by the method.
-
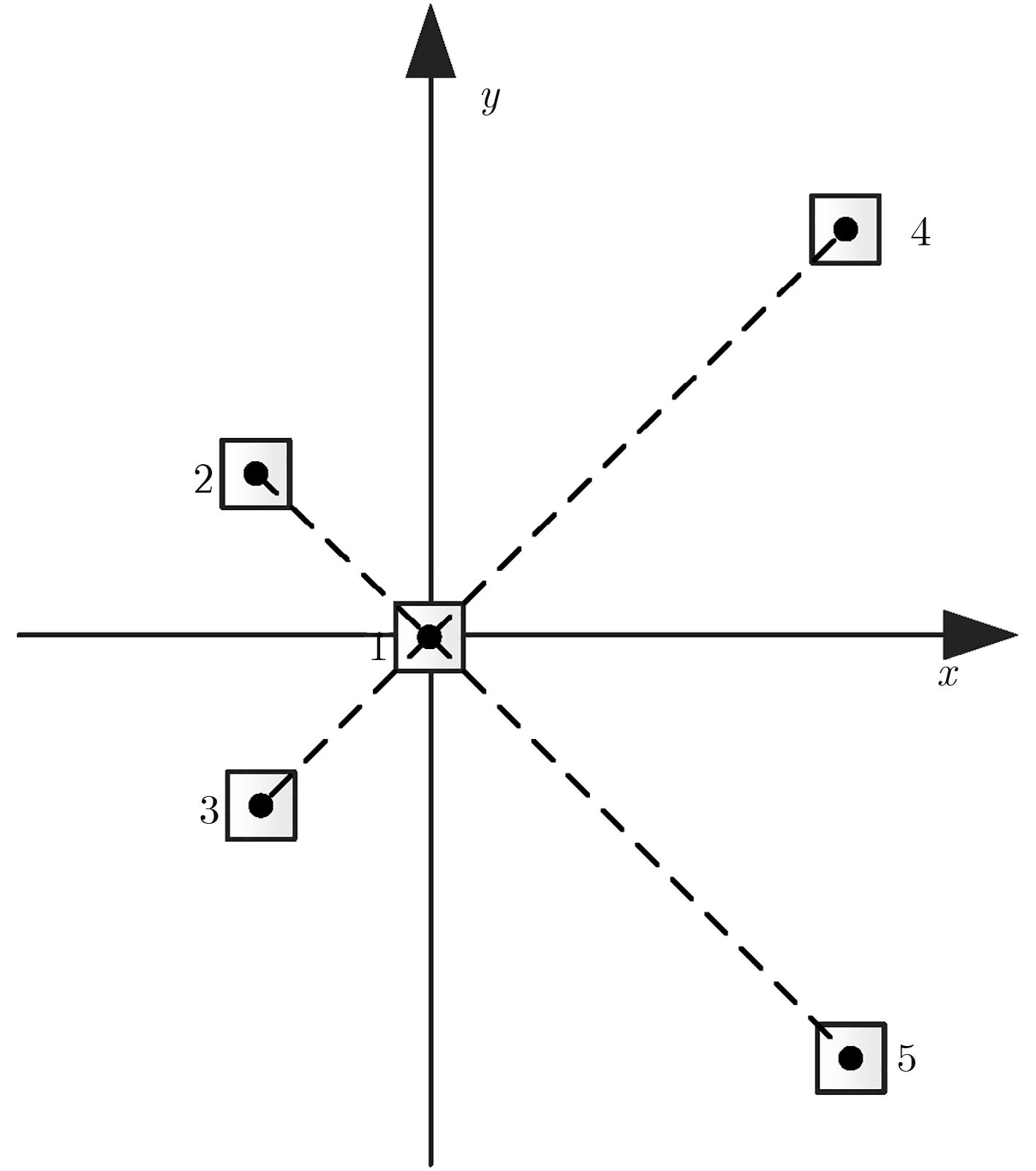
表 1 各子阵坐标
阵面编号 设计坐标(m) 实际坐标(m) 固定相位差误差(rad) 坐标标校结果(m) 固定相位差标校结果(rad) 1 (0, 0, 0) (0, 0, 0) 0 (0, 0, 0) 0 2 (–20, 20, 0) (–20.22, 20.03, 0.0073) 0.1 (–20.2202, 20.0308, 0.0091) 0.1120 3 (–20, –20, 0) (–19.78, –20.07, 0.0048) –2.1 (–19.7295, –20.0687, 0.0045) –2.1150 4 (50, 50, 0) (49.85, 50.11, 0.042) 0.8 (49.8503, 50.1114, 0.0374) 0.7509 5 (50, –50, 0) (50.05, –50.18, –0.012) –0.7 (50.0495, –50.1788, –0.0215) –0.7271  下载: 导出CSV
下载: 导出CSV
表 2 雷达观测范围内检测卫星统计
弧段编号 检测点数 最大信噪比(dB) 平均信噪比(dB) $\theta $角(°) $\varphi $角(°) 1 43 27.6312 23.6608 61.5580 118.3957 2 15 18.5448 17.1017 80.5948 99.4004 3 35 32.0955 23.8029 96.6451 83.3213 4 45 23.7853 19.0944 97.0084 83.0646 5 4 14.2794 13.8117 61.5526 118.3925 6 39 34.1118 26.6359 97.5285 82.4456 7 41 19.2383 16.3595 73.1886 106.8396 8 44 23.1740 18.8095 98.0682 81.9641 9 22 15.7978 14.1222 78.8579 101.2333 10 32 17.5476 14.8111 104.6093 75.4005 11 39 34.1118 26.6359 97.5572 82.5389 12 41 19.2383 16.3595 73.2011 106.8463 13 44 23.1740 18.8095 98.0618 81.9602 14 22 15.7978 14.1222 78.8513 101.2298 15 32 17.5476 14.8111 104.6212 75.4086
下载: 导出CSV
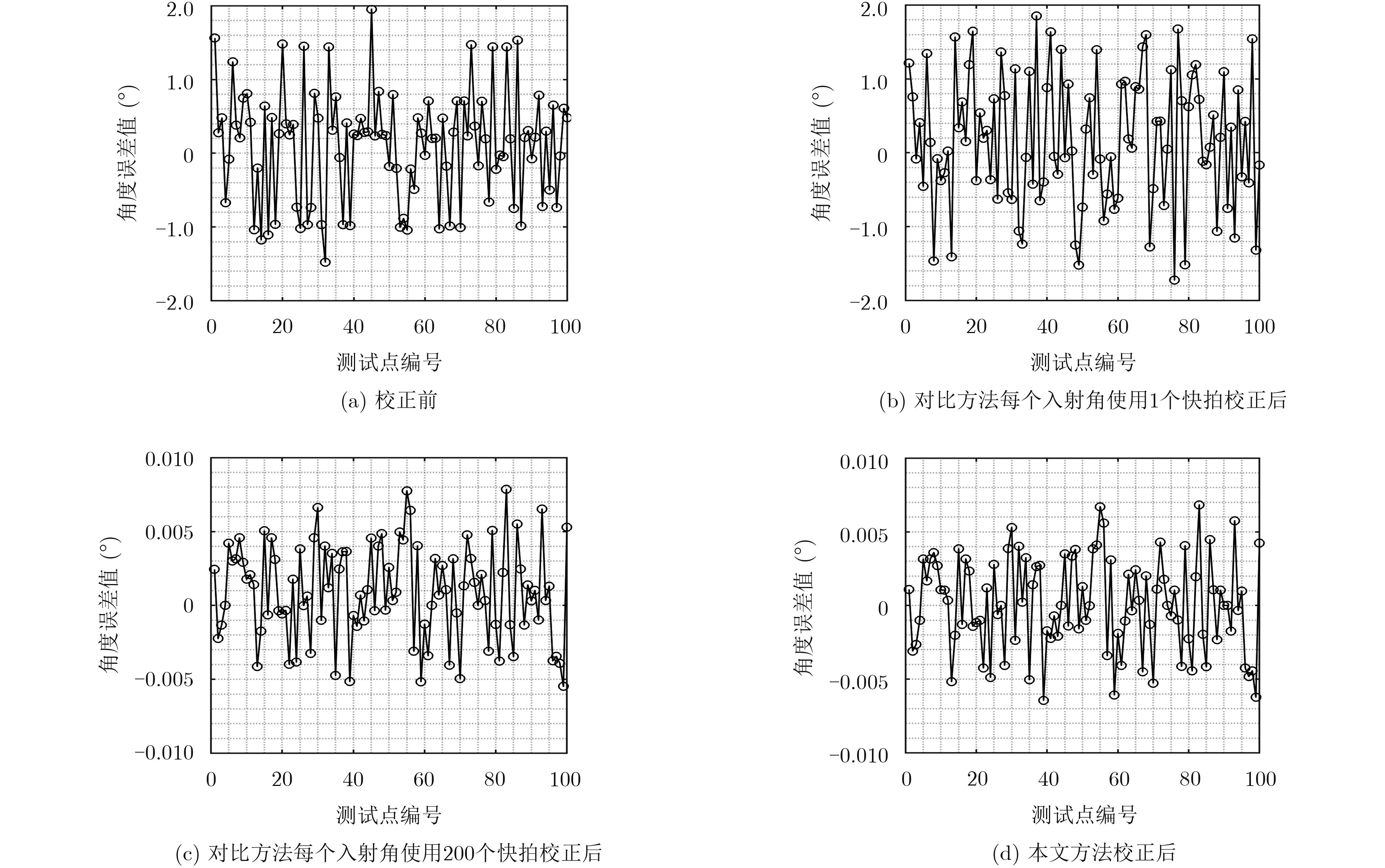
表 3 修正前后测角误差标准差(°)
实验编号 修正前$\theta $角标准差 修正前$\varphi $角标准差 修正后$\theta $角标准差 修正后$\varphi $角标准差 1 0.2127 0.05465 0.003815 0.006577 2 0.3085 0.06186 0.003523 0.006966 3 0.3079 0.05706 0.003321 0.007179
下载: 导出CSV
-
PASALA K, PENNO R, and SCHNEIDER S. Novel wideband multimode hybrid interferometer system[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1396–1406. doi: 10.1109/TAES.2003.1261135 PENNO R, PASALA K, and SCHNEIDER S. A novel multi-mode interferometer system[C]. 2001 IEEE Aerospace Conference Proceedings, Big Sky, USA, 2001: 2/767-2/778. doi: 10.1109/AERO.2001.931257. 蒋立民. 地面测控雷达角度标校技术[J]. 装备制造技术, 2018(3): 129–131. doi: 10.3969/j.issn.1672-545X.2018.03.041JIANG Limin. Angle calibration technology of ground TT & C radar and angle calibration technology of ground TT & C radar[J]. Equipment Manufacturing Technology, 2018(3): 129–131. doi: 10.3969/j.issn.1672-545X.2018.03.041 吴奋陟, 郭绍刚, 朱飞虎, 等. 基于标定场的激光雷达两步标定方法[J]. 空间控制技术与应用, 2017, 43(4): 57–62.WU Fenzhi, GUO Shaogang, ZHU Feihu, et al. Two-step calibration method of LIDAR sensor based on calibration field[J]. Aerospace Control and Application, 2017, 43(4): 57–62. 文玲, 高沅铭, 常宇亮. 基于标校球的瞬态极化雷达校准方法[J]. 雷达科学与技术, 2012, 10(6): 580–584, 589.WEN Ling, GAO Yunming, and CHANG Yuliang. Calibration method for instantaneous polarimetric radar based on metal sphere[J]. Radar Science and Technology, 2012, 10(6): 580–584, 589. 马可, 张远安, 王仁涛, 等. 主动防护雷达的角度标校[J]. 电子测量技术, 2017, 40(1): 30–33, 41. doi: 10.3969/j.issn.1002-7300.2017.01.007MA Ke, ZHANG Yuan’an, WANG Rentao, et al. Angle calibration of active protection radar[J]. Electronic Measurement Technology, 2017, 40(1): 30–33, 41. doi: 10.3969/j.issn.1002-7300.2017.01.007 程丰, 龚子平, 张驰, 等. 一种基于旋转测量的阵列幅相误差校正新方法[J]. 电子与信息学报, 2017, 39(8): 1899–1905. doi: 10.11999/JEIT161058CHENG Feng, GONG Ziping, ZHANG Chi, et al. A new rotation measurement-based method for array gain-phase errors calibration[J]. Journal of Electronics &Information Technology, 2017, 39(8): 1899–1905. doi: 10.11999/JEIT161058 袁自月, 牛一鸣, 杨国, 等. 一种阵列天线阵元幅相、位置误差校正方法[J]. 电子与信息学报, 2014, 36(9): 2232–2237. doi: 10.3724/SP.J.1146.2013.01807YUAN Ziyue, NIU Yiming, YANG Guo, et al. A calibration method for sensor gain/phase and position errors of array antenna[J]. Journal of Electronics &Information Technology, 2014, 36(9): 2232–2237. doi: 10.3724/SP.J.1146.2013.01807 袁勇, 李革, 马鹏斌, 等. 雷达的卫星标定技术方法[J]. 陕西科技大学学报, 2008, 26(4): 109–113. doi: 10.3969/j.issn.1000-5811.2008.04.026YUAN Yong, LI Ge, MA Pengbing, et al. Satellite calibration of radar[J]. Journal of Shaanxi University of Science and Technology, 2008, 26(4): 109–113. doi: 10.3969/j.issn.1000-5811.2008.04.026 王建富, 吴金海, 钮俊清, 等. 一种雷达卫星标校中的野值剔除方法[J]. 舰船电子对抗, 2017, 40(3): 54–57. doi: 10.16426/j.cnki.jcdzdk.2017.03.013WANG Jianfu, WU Jinhai, NIU Junqing, et al. An outlier elimination method in satellite calibration for radar[J]. Shipboard Electronic Countermeasure, 2017, 40(3): 54–57. doi: 10.16426/j.cnki.jcdzdk.2017.03.013 杨磊, 刘冰, 李晓勇. 基于参数估计的动平台雷达等效轴系参数准实时标定方法[J]. 无线电工程, 2016, 46(7): 93–97. doi: 10.3969/j.issn.1003-3106.2016.07.24YANG Lei, LIU Bing, and LI Xiaoyong. Study on equivalent axis parameter calibration for radar system on moving platform based on parameter estimation[J]. Radio Engineering, 2016, 46(7): 93–97. doi: 10.3969/j.issn.1003-3106.2016.07.24 郭佳意, 钮俊清. 雷达卫星标校的工程实现研究[J]. 空军预警学院学报, 2014, 28(3): 165–167. doi: 10.3969/j.issn.2095-5839.2014.03.003GUO Jiayi and NIU Junqing. Engineering implementation of satellite calibration for radar[J]. Journal of Air Force Early Warning Academy, 2014, 28(3): 165–167. doi: 10.3969/j.issn.2095-5839.2014.03.003 李鹏飞, 郝宇, 费华平, 等. 基于多直线融合的雷达误差标定算法研究[J]. 雷达科学与技术, 2017, 15(6): 682–686. doi: 10.3969/j.issn.1672-2337.2017.06.019LI Pengfei, HAO Yu, FEI Huaping, et al. Radar calibration error correction algorithm based on segment track linear fitting[J]. Radar Science and Technology, 2017, 15(6): 682–686. doi: 10.3969/j.issn.1672-2337.2017.06.019 钟霞, 张建伟, 于灏. 基于最小二乘估计的雷达系统误差卫星标定方法[J]. 空间科学学报, 2013, 33(5): 554–560. doi: 10.11728/cjss2013.05.554ZHONG Xia, ZHANG Jianwei, and YU Hao. A method of satellite calibration for radar’s system error based on least-square estimation[J]. Chinese Journal of Space Science, 2013, 33(5): 554–560. doi: 10.11728/cjss2013.05.554 张海成, 杨江平, 王晗中. 大型跟踪测量雷达的卫星标定方法研究[J]. 雷达科学与技术, 2014, 12(5): 470–472, 481. doi: 10.3969/j.issn.1672-2337.2014.05.004ZHANG Haicheng, YANG Jiangping, and WANG Hanzhong. Study on satellite calibration method for tracking and instrumentation radar[J]. Radar Science and Technology, 2014, 12(5): 470–472, 481. doi: 10.3969/j.issn.1672-2337.2014.05.004 -


 下载:
下载:


图(4) / 表(3)
计量
- 文章访问数: 3639
- HTML全文浏览量: 1579
- PDF下载量: 133
- 被引次数: 0
