

Scheduling Method Based on Markov Decision Process for Multi-sensor Cooperative Detection and Tracking
-
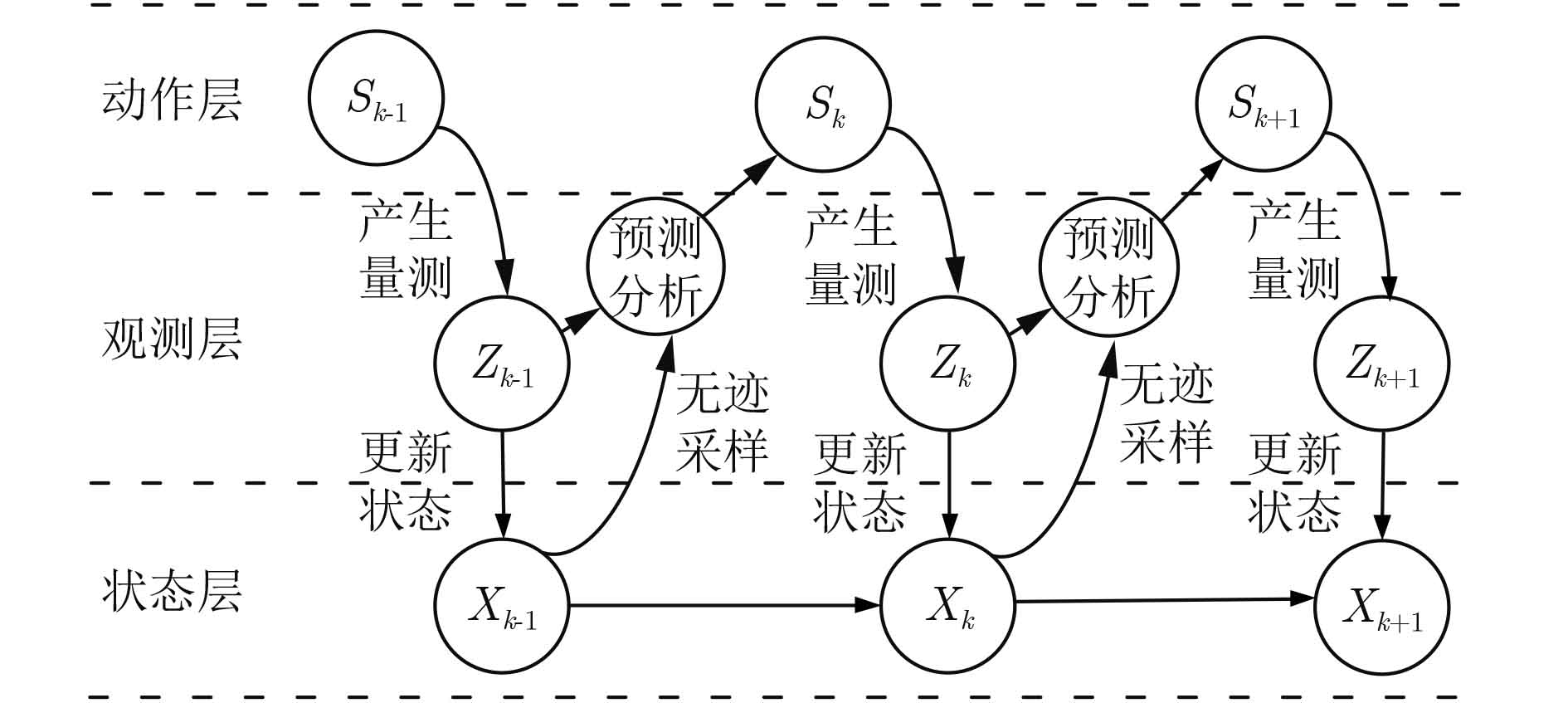
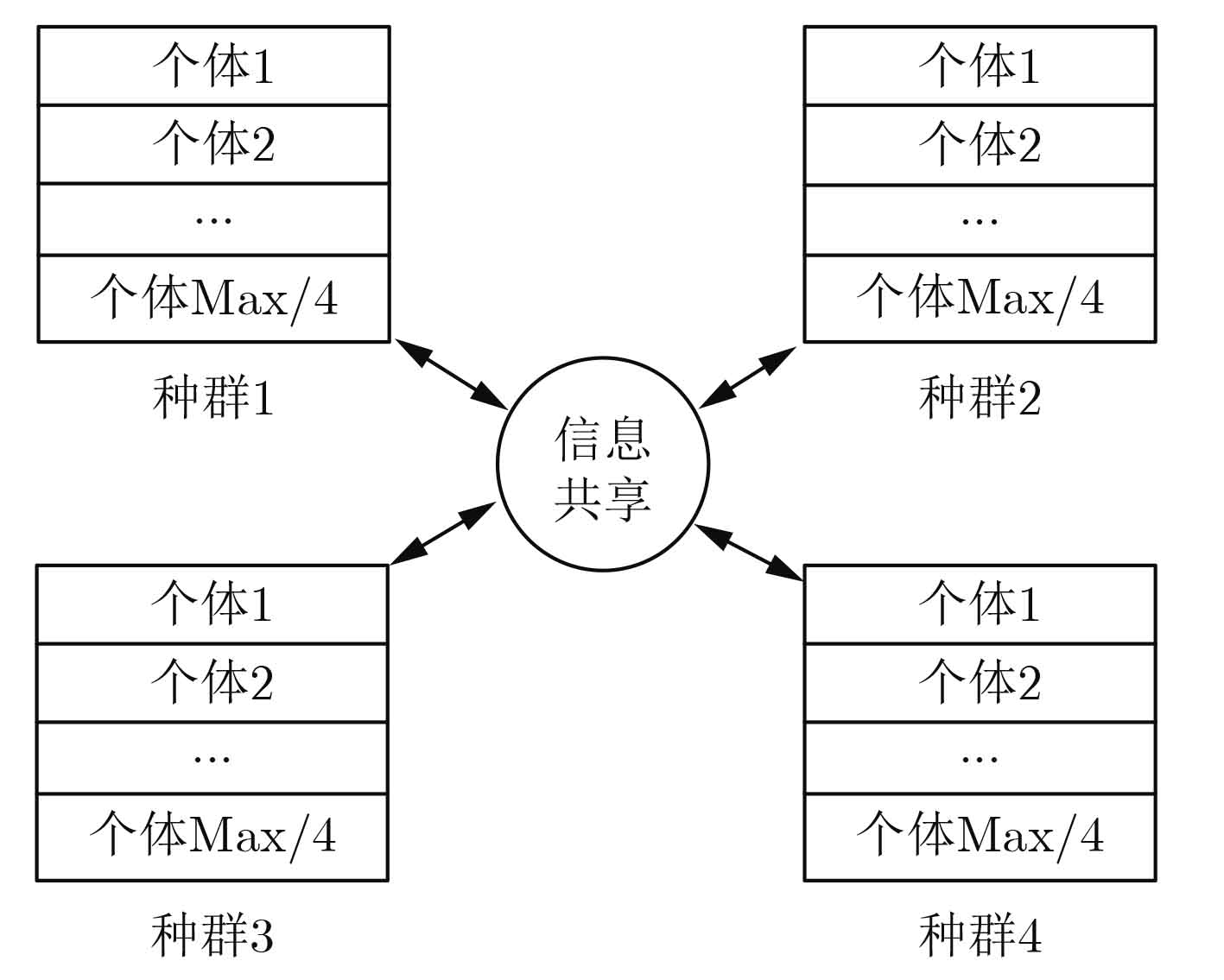
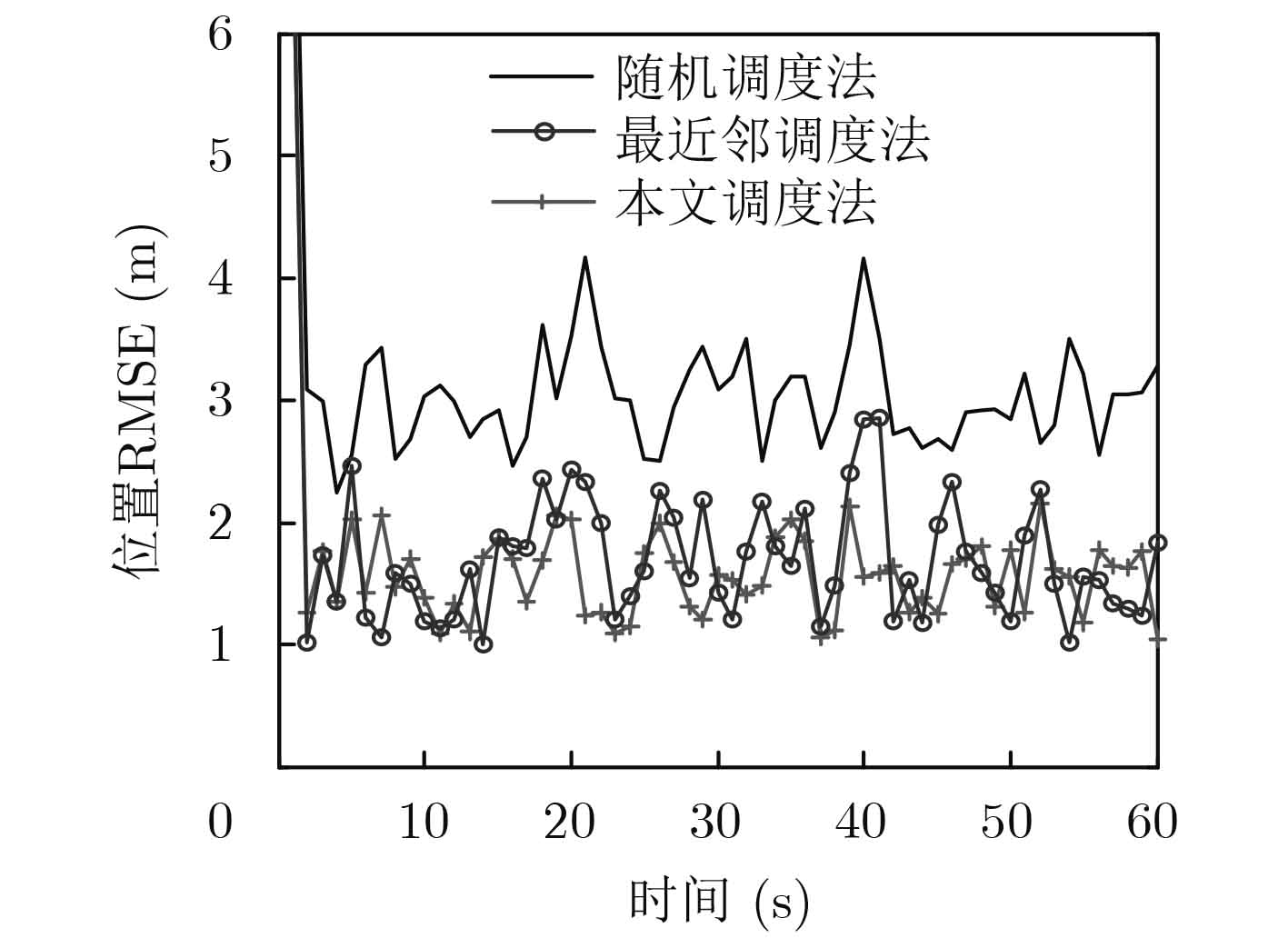
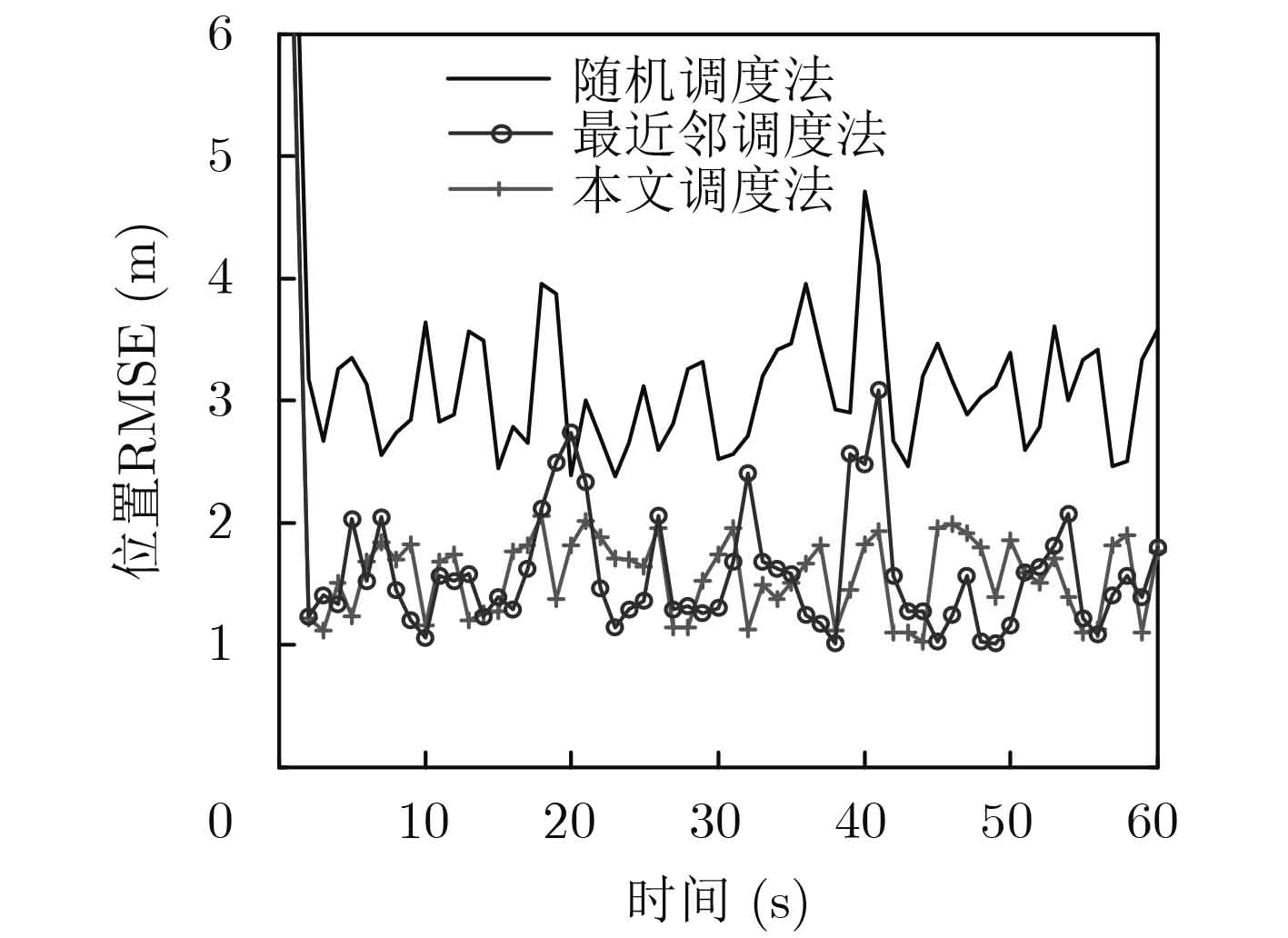
摘要: 针对多任务场景下的传感器调度问题,该文提出一种面向目标协同检测与跟踪的多传感器调度方法。首先,该方法基于部分可观马尔科夫决策过程(POMDP)构建传感器调度模型,并基于后验克拉美-罗下界(PCRLB)设计优化目标函数。其次,考虑传感器切换时间和目标数目的时变性,采用随机分布粒子计算新生目标的检测概率,给出了固定目标数目和时变目标数目情形下的传感器调度方法。最后,为满足在线调度的实时性需求,采用自适应多种群协同差分进化(AMCDE)算法求解传感器调度方案。仿真结果表明,该方法能够有效应对多任务场景,实现多传感器资源的合理调度。Abstract: In order to solve the problem of sensor scheduling in the multi-task scenario, a multi-sensor scheduling method for target cooperative detection and tracking is proposed. Firstly, the sensor scheduling model is built based on the Partially Observable Markov Decision Process (POMDP) and an objective function is designed based on Posterior Carmér-Rao Lower Bound (PCRLB). Then, considering sensor switching time and the change of target number, the randomly distributed particles are used to calculate the detection probability of new target, and the sensor scheduling methods are given for the situations with fixed target number and time-varying target number. At last, to meet the real-time requirement of online scheduling, an Adaptive Multi-swarm Cooperative Differential Evolution (AMCDE) algorithm is used to solve the sensor scheduling scheme. Simulation results show that the method can effectively deal with multi-task scenarios and realize reasonable scheduling of multi-sensor resources.
-
表 1 几种DE算法变异策略
策略名称 变异公式 Rand经典 ${\text{V}}_l^{j + 1} = {\text{Y}}_{{\rm{r1}}}^j + \beta ({\text{Y}}_{{\rm{r2}}}^j - {\text{Y}}_{{\rm{r3}}}^j)$ Best ${\text{V}}_l^{j + 1} = {\text{Y}}_{\rm{b}}^j + \beta ({\text{Y}}_{{\rm{r2}}}^j - {\text{Y}}_{{\rm{r3}}}^j)$ Rand-to-Best ${\text{V}}_l^{j + 1} = {\text{Y}}_{{\rm{r1}}}^j + {\beta _1}({\text{Y}}_{\rm{b}}^j - {\text{Y}}_{{\rm{r1}}}^j) + {\beta _2}({\text{Y}}_{{\rm{r2}}}^j - {\text{Y}}_{{\rm{r3}}}^j)$ Target-to-Best ${\text{V}}_l^{j + 1} = {\text{Y}}_l^j + {\beta _1}({\text{Y}}_{\rm{b}}^j - {\text{Y}}_l^j) + {\beta _2}({\text{Y}}_{{\rm{r2}}}^j - {\text{Y}}_{{\rm{r3}}}^j)$  下载: 导出CSV
下载: 导出CSV
表 2 求解算法性能比较
算法名称 寻优平均值 寻得最优平均步数 单次运算平均时间(s) DE 35.72 30.78 0.37 IVDE 21.24 18.06 0.45 CDE 23.30 22.12 0.40 AMCDE 21.29 16.63 0.39
下载: 导出CSV
-
乔成林, 单甘霖, 段修生, 等. 面向跟踪任务需求的主动传感器调度方法[J]. 系统工程与电子技术, 2017, 39(11): 2515–2521. doi: 10.3969/j.issn.1001-506X.2017.11.18QIAO Chenglin, SHAN Ganlin, DUAN Xiusheng, et al. Scheduling algorithm of active sensors for tracking task requirement[J]. Systems Engineering and Electronics, 2017, 39(11): 2515–2521. doi: 10.3969/j.issn.1001-506X.2017.11.18 陈延军, 潘泉, 梁彦, 等. 基于信息量的分布式协同自组织算法[J]. 控制理论与应用, 2011, 28(10): 1391–1398.CHEN Yanjun, PAN Quan, LIANG Yan, et al. Decentralized collaborative self-organization algorithm based on information content[J]. Control Theory &Applications, 2011, 28(10): 1391–1398. ZHANG Duo, LIU Meiqin, ZHANG Senlin, et al. Mutual-information based weighted fusion for target tracking in underwater wireless sensor networks[J]. Frontiers of Information Technology & Electronic Engineering, 2018, 19(4): 544–556. doi: 10.1631/FITEE.1601695 CAO Nianxia, CHOI S, MASAZADE E, et al. Sensor selection for target tracking in wireless sensor networks with uncertainty[J]. IEEE Transactions on Signal Processing, 2016, 64(20): 5191–5204. doi: 10.1109/TSP.2016.2595500 ZHANG Qiang, LIU Meiqin, and ZHANG Senlin. Node topology effect on target tracking based on UWSNs using quantized measurements[J]. IEEE Transactions on Cybernetics, 2015, 45(10): 2323–2335. doi: 10.1109/TCYB.2014.2371232 KESHAVARZ-MOHAMMADIYAN A and KHALOOZADEH H. Interacting multiple model and sensor selection algorithms for manoeuvring target tracking in wireless sensor networks with multiplicative noise[J]. International Journal of Systems Science, 2017, 48(5): 899–908. doi: 10.1080/00207721.2016.1177128 VAISENBERG R, MOTTA A D, MEHROTRA S, et al. Scheduling sensors for monitoring sentient spaces using an approximate POMDP policy[J]. Pervasive and Mobile Computing, 2014, 10: 83–103. doi: 10.1016/j.pmcj.2013.10.014 胡波, 王祺尧, 冯辉, 等. 一种无线传感器网络中目标跟踪的自适应节点调度算法[J]. 电子与信息学报, 2018, 40(9): 33–41. doi: 10.11999/JEIT171154HU Bo, WANG Qiyao, FENG Hui, et al. Adaptive sensor scheduling algorithm for target tracking in wireless sensor networks[J]. Journal of Electronics &Information Technology, 2018, 40(9): 33–41. doi: 10.11999/JEIT171154 ZHANG Zining and SHAN Ganlin. UTS-based foresight optimization of sensor scheduling for low interception risk tracking[J]. International Journal of Adaptive Control and Signal Processing, 2014, 28(10): 921–931. doi: 10.1002/acs.2417 万开方, 高晓光, 李波, 等. 基于部分可观察马尔可夫决策过程的多被动传感器组网协同反隐身探测任务规划[J]. 兵工学报, 2015, 36(4): 731–743. doi: 10.3969/j.issn.1000-1093.2015.04.023WAN Kaifang, GAO Xiaoguang, LI Bo, et al. Mission planning of passive networked sensors for cooperative anti-stealth detection based on POMDP[J]. Acta Armamentarii, 2015, 36(4): 731–743. doi: 10.3969/j.issn.1000-1093.2015.04.023 ARASARATNAM I, HAYKIN S, and HURD T R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 4977–4993. doi: 10.1109/TSP.2010.2056923 THARMARASA R, KIRUBARAJAN T, HERNANDEZ M L, et al. PCRLB-based multisensor array management for multitarget tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(2): 539–555. doi: 10.1109/taes.2007.4285352 QIN A K, HUANG V L, and SUGANTHAN P N. Differential evolution algorithm with strategy adaptation for global numerical optimization[J]. IEEE Transactions on Evolutionary Computation, 2009, 13(2): 398–417. doi: 10.1109/tevc.2008.927706 LI Genghui, LIN Qiuzhen, CUI Laizhong, et al. A novel hybrid differential evolution algorithm with modified CoDE and JADE[J]. Applied Soft Computing, 2016, 47: 577–599. doi: 10.1016/j.asoc.2016.06.011 邱晓红, 胡玉婷, 李渤. 求解多处理器任务调度问题的改进差分进化算法[J]. 控制与决策, 2016, 31(2): 217–224. doi: 10.13195/j.kzyjc.2014.1418QIU Xiaohong, HU Yuting, and LI Bo. Multiprocessor task scheduling based on improved differential evolution algorithm[J]. Control and Decision, 2016, 31(2): 217–224. doi: 10.13195/j.kzyjc.2014.1418 -

 下载:
下载:






图(12) / 表(2)
计量
- 文章访问数: 3207
- HTML全文浏览量: 1472
- PDF下载量: 112
- 被引次数: 0
