

Research on Application of Same-beam Interferometry in China Lunar Exploration
-
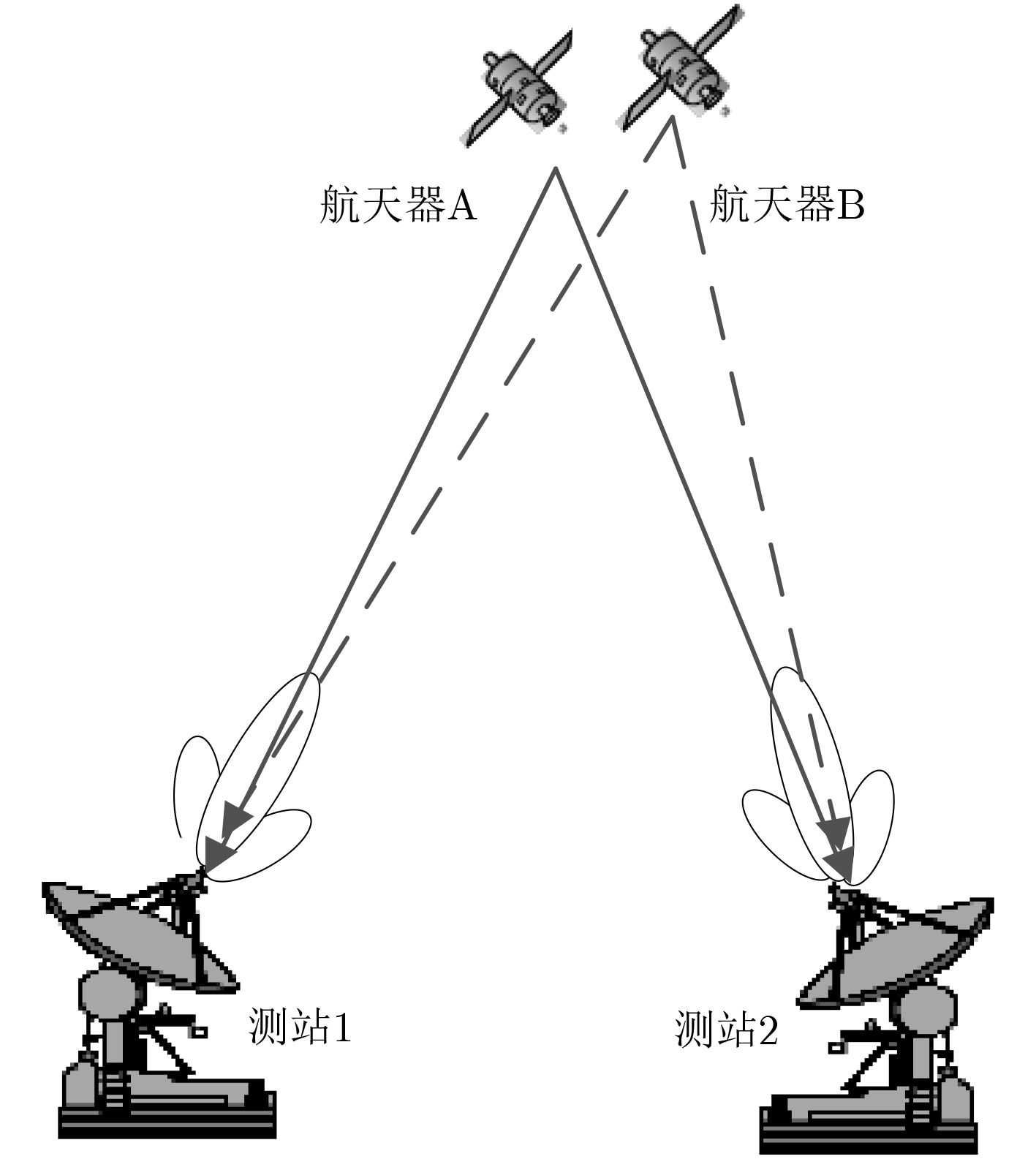
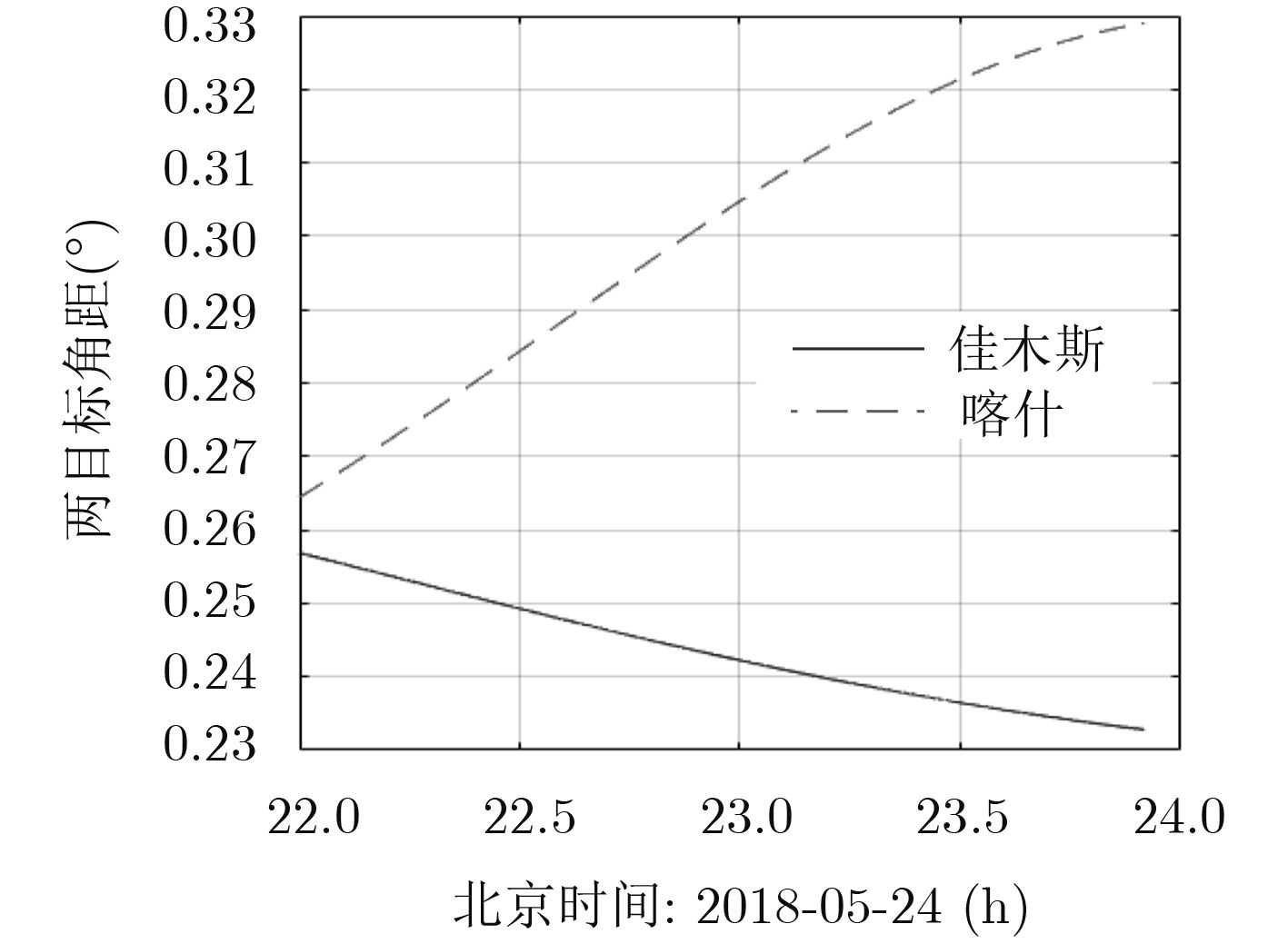
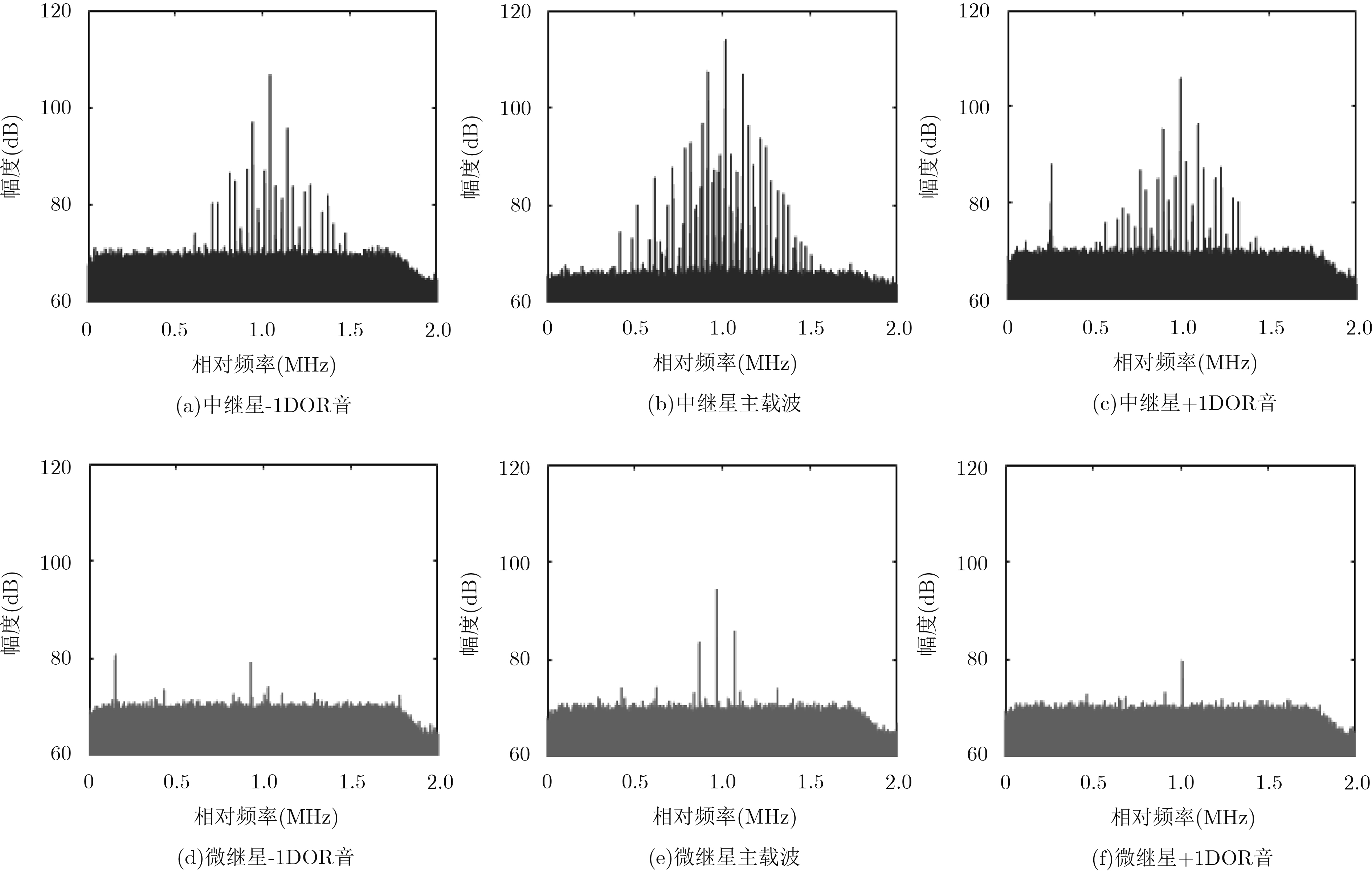
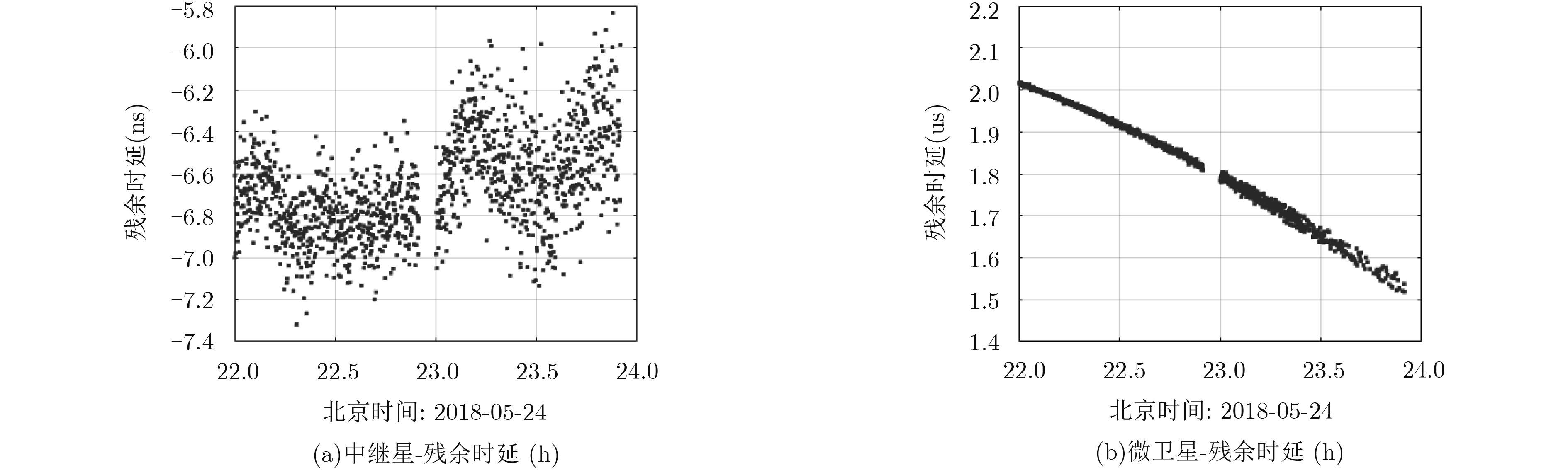
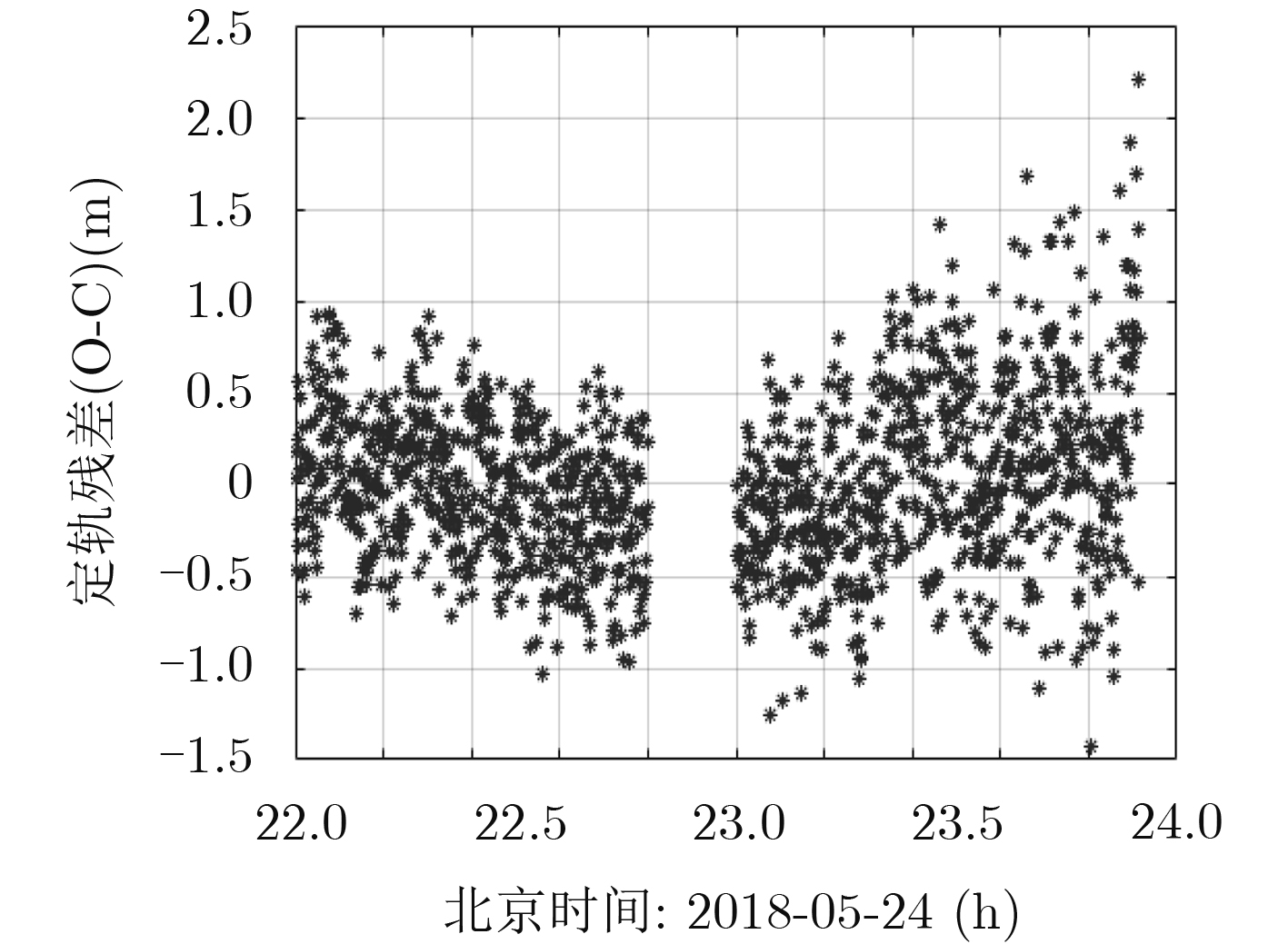
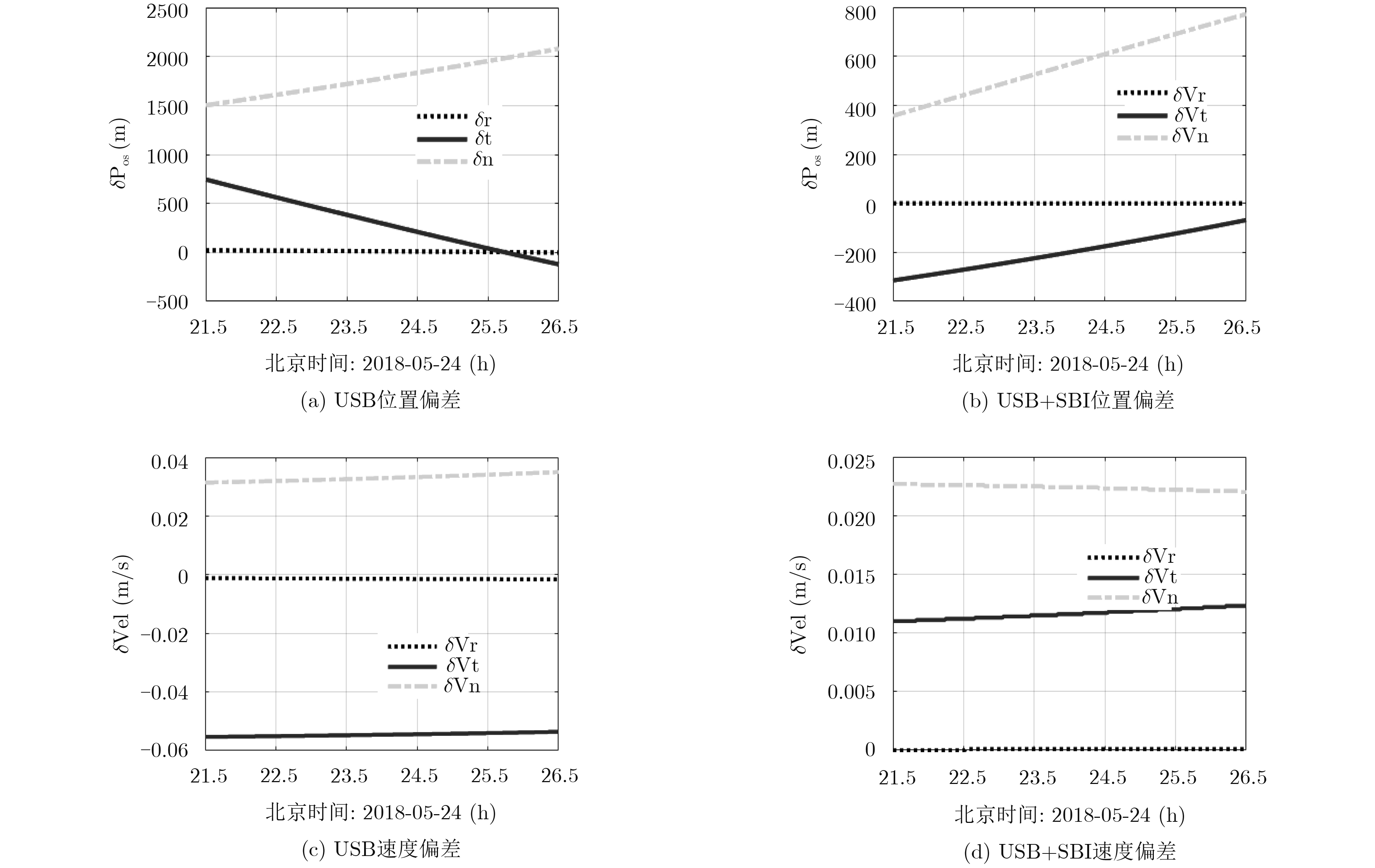
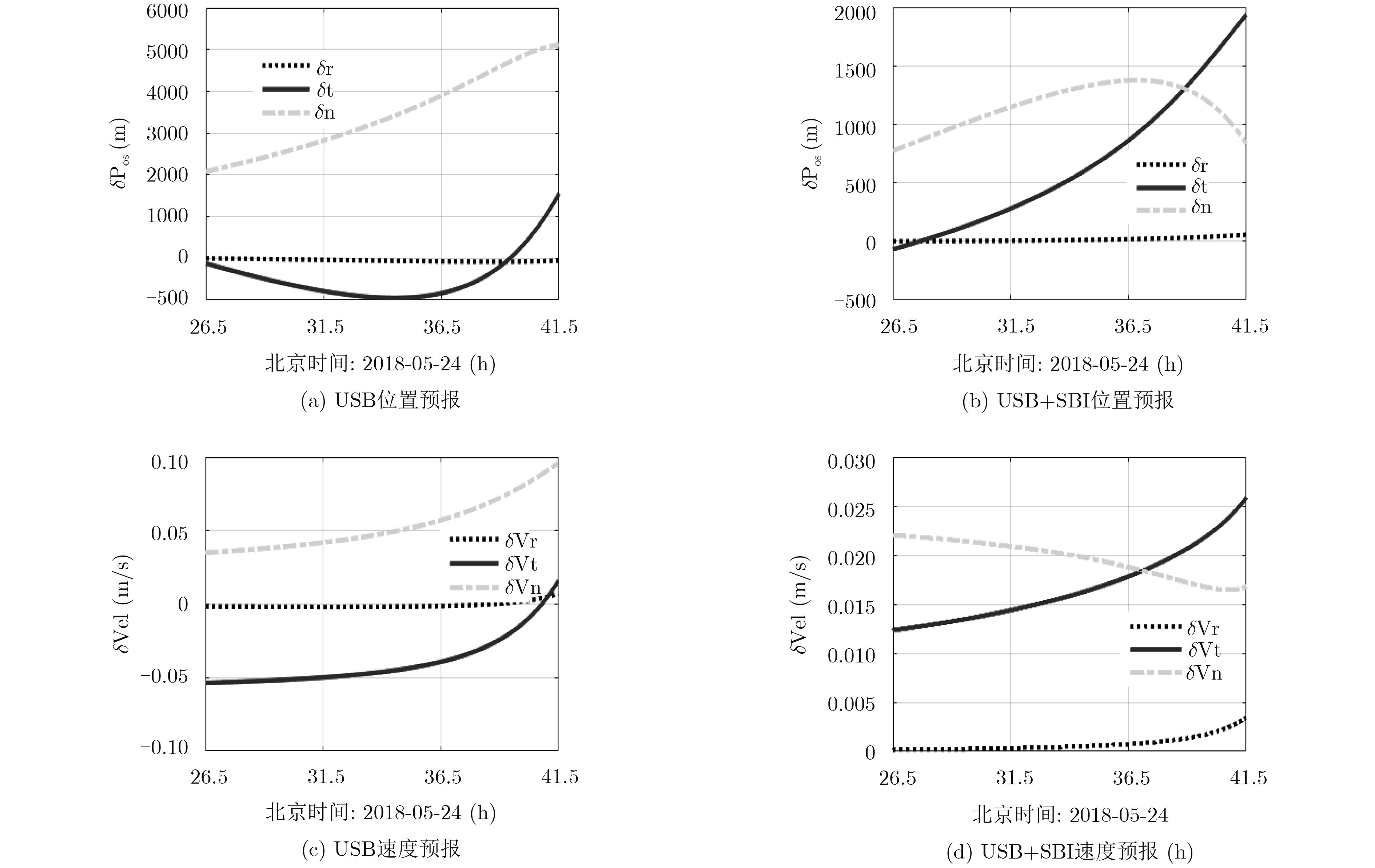
摘要: 探月工程嫦娥4号中继星任务同时搭载月球轨道微卫星,受地面测控资源分配限制,微卫星的轨道测量由地基S/X频段统一测控(TT&C)系统天线(USB)保障。该文通过分析地月转移轨道段中继星、微卫星相对于跟踪测站的几何构型,依托深空干涉测量系统设计实现对微卫星、中继星的同波束干涉测量(SBI)跟踪;发挥中继星测控资源丰富、轨道精度高的优势,获取了微卫星优于1 ns的测角观测量;并应用于微卫星短弧定轨,统计分析表明定轨精度由2 km提升至优于1 km、预报精度由6 km提升至2 km,为微卫星轨道机动后的快速高精度轨道确定与预报提供了有力支撑。
-
关键词:
- 同波束干涉测量 /
- 短弧定轨 /
- 深空测控干涉测量系统 /
- 嫦娥4号
Abstract: Because of restricted earth-based tracking network, Tracking, Telemetry and Command (TT&C) for lunar orbit micro-satellite is depended on Unified S/X Band (USB) antennas in China Chang’E-4 lunar exploration. Based on analysis of the geometry between relay satellite, micro-satellite and earth-based antennas during earth-moon transfer orbit, an applicable method to acquire delay observable through Same-Beam Interferometry (SBI) tracking by China deep space network is discussed. Benefited from more kinds of tracking resources and high accuracy orbit of relay satellite, delay observable for angular position measurement of micro-satellite in the order of 1 ns is obtained, which improves the micro-satellite orbit determination accuracy from 2 km to less than 1 km and improves orbit prediction accuracy from 6 km to 2 km. SBI tracking plays an important role in short arc orbit determination of micro-satellite. -
李海涛, 周欢, 郝万宏, 等. 深空导航无线电干涉测量技术的发展历程和展望[J]. 飞行器测控学报, 2013, 32(6): 470–478.LI Haitao, ZHOU Huan, HAO Wanhong, et al. Development of radio interferometry and its prospect in deep space navigation[J]. Journal of Spacecraft TT&C Technology, 2013, 32(6): 470–478. CURKENDALL D W and BORDER J S. Delta-DOR: The one-nanoradian navigation measurement system of the deep space network—history, architecture, and componentry[R]. IPN Progress Report 42-193, 2013. DUEV D A, CALVÉS G M, POGREBENKO S V, et al. Spacecraft VLBI and doppler tracking: Algorithms and implementation[J]. Astronomy & Astrophysics, 2012, 541: A43. doi: 10.1051/0004-6361/201218885 CALVÉS G M, NEIDHARDT A, PLÖTZ C, et al. Venus and Mars Express spacecraft observations with wettzell radio telescopes[C]. IVS 2016 General Meeting, Johannesburg, South Africa, 2016: 382–385. BORDER J S. Innovations in delta differential one-way range: From viking to mars science laboratory[C]. 2009 International Symposium on Space Flight Dynamics, Toulouse, France, 2009: 1–16. ZHENG W M, HUANG Y, CHEN Z, et al. Real-time and high-accuracy VLBI in CE’3 mission[C]. The 2014 IVS General Meeting, Shanghai, China, 2014: 466–472. URL: http://ivscc.bkg.bund.de/publications/gm2014/100_Zheng_etal.pdf. 马茂莉, 郑为民, 黄逸丹, 等. 嫦娥三号探测器DOR信号本地相关处理与定轨验证[J]. 中国科学: 物理学 力学 天文学, 2017, 47(2): 029502. doi: 10.1360/SSPMA2016-00361MA Maoli, ZHENG Weimin, HUANG Yidan, et al. Local correlation and orbit determination for DOR signals in Chang’E-3[J]. Scientia Sinica Physica,Mechanica &Astronomica, 2017, 47(2): 029502. doi: 10.1360/SSPMA2016-00361 刘庆会, 吴亚军. 高精度VLBI技术在深空探测中的应用[J]. 深空探测学报, 2015, 2(3): 208–212.LIU Qinghui and WU Yajun. Application of high precision VLBI technology in deep space exploration[J]. Journal of Deep Space Exploration, 2015, 2(3): 208–212. 郭丽, 李金岭, 童锋贤, 等. 同波束VLBI技术对嫦娥三号巡视器的高精度相对定位[J]. 武汉大学学报: 信息科学版, 2016, 41(8): 1125–1130. doi: 10.13203/j.whugis20140439GUO Li, LI Jinling, TONG Fengxian, et al. Precisely relative positioning of Chang’E 3 rover with SBI delta VLBI delay measurements[J]. Geomatics and Information Science of Wuhan University, 2016, 41(8): 1125–1130. doi: 10.13203/j.whugis20140439 郑鑫, 刘庆会, 吴亚军, 等. 双月球探测器相对定位的同波束VLBI技术研究[J]. 宇航学报, 2014, 35(9): 1030–1035. doi: 10.3873/j.issn.1000-1328.2014.09.007ZHENG Xin, LIU Qinghui, WU Yajun, et al. Research on same-beam VLBI technique for relative position determination of two lunar spacecrafts[J]. Journal of Astronautics, 2014, 35(9): 1030–1035. doi: 10.3873/j.issn.1000-1328.2014.09.007 刘庆会, 吴亚军, 黄勇, 等. 基于同波束VLBI的火星车测定位技术[J]. 中国科学: 物理学 力学 天文学, 2015, 45(9): 099502. doi: 10.1360/SSPMA2015-00287LIU Qinghui, WU Yajun, HUANG Yong, et al. Mars rover positioning technology based on same-beam VLBI[J]. Scientia Sinica Physica,Mechanica &Astronomica, 2015, 45(9): 099502. doi: 10.1360/SSPMA2015-00287 BORDER J S, FOLKNER W M, KAHN R D, et al. Precise tracking of the Magellan and pioneer Venus orbiters by same-beam interferometry Part I: Data accuracy analysis[R]. TDA Progress Report 42-110, 1992. 刘庆会, 陈明, GOOSSENS S, et al. 同波束VLBI在采样返回式多目标探测器精密测轨测位中的应用[J]. 中国科学: 物理学 力学 天文学, 2010, 53(6): 1153–1161.LIU Qinghui, CHEN Ming, GOOSSENS S, et al. Applications of same-beam VLBI in the orbit determination of multi-spacecrafts in a lunar sample-return mission[J]. Science China Physics,Mechanics &Astronomy, 2010, 53(6): 1153–1161. 刘庆会, 史弦, 菊池冬彦, 等. 上海和乌鲁木齐射电望远镜的超高精度同波束VLBI观测[J]. 中国科学 G辑: 物理学 力学 天文学, 2009, 52(12): 1858–1866.LIU Qinghui, SHI Xian, FUYUHIKO K, et al. High-accuracy same-beam VLBI observations using Shanghai and Urumqi telescopes[J]. Science in China Series G-Physics,Mechanics &Astronomy, 2009, 52(12): 1858–1866. 凤凰网资讯. 嫦娥四号中继星" 鹊桥”顺利进入使命轨道运行[EB/OL]. http://news.ifeng.com/a/20180614/58718025_0.shtml, 2018. 唐歌实. 深空测控无线电测量技术[M]. 北京: 国防工业出版社, 2012: 109–122.TANG Geshi. Radiometric Measuring Techniques for Deep Space Navigation[M]. Beijing: National Defend Industry Press, 2012: 109–122. 刘庆会. 同波束VLBI技术在深空探测器测定轨中的应用[J]. 遥测遥控, 2016, 37(6): 36–44. doi: 10.3969/j.issn.2095-1000.2016.06.004LIU Qinghui. Applications of same-beam VLBI technology in orbit determination of deep space satellites[J]. Journal of Telemetry,Tracking and Command, 2016, 37(6): 36–44. doi: 10.3969/j.issn.2095-1000.2016.06.004 姜坤, 王元钦, 马宏, 等. 甚长基线干涉测量数字基带转换器子通道时延影响分析[J]. 电子与信息学报, 2014, 36(6): 1509–1514.JIANG Kun, WANG Yuanqin, MA Hong, et al. Impact analysis of the sub-channel delay in Very Long Baseline Interferometry digital baseband converter[J]. Journal of Electronics &Information Technology, 2014, 36(6): 1509–1514. 喻业钊, 韩雷, 周爽, 等. 佳木斯66 m射电望远镜指向精度测量及改进[J]. 天文研究与技术, 2016, 13(4): 408–415. doi: 10.3969/j.issn.1672-7673.2016.04.004YU Yezhao, HAN Lei, ZHOU Shuang, et al. A study on the measurements and improvements of pointing accuracy of Jiamusi 66 m radio telescope[J]. Astronomical Research and Technology, 2016, 13(4): 408–415. doi: 10.3969/j.issn.1672-7673.2016.04.004 -

 下载:
下载:


图(7)
计量
- 文章访问数: 2357
- HTML全文浏览量: 1025
- PDF下载量: 65
- 被引次数: 0
 下载:
下载:
