

A Novel ISAR Imaging Algorithm for Microwave Photonics Radar
-
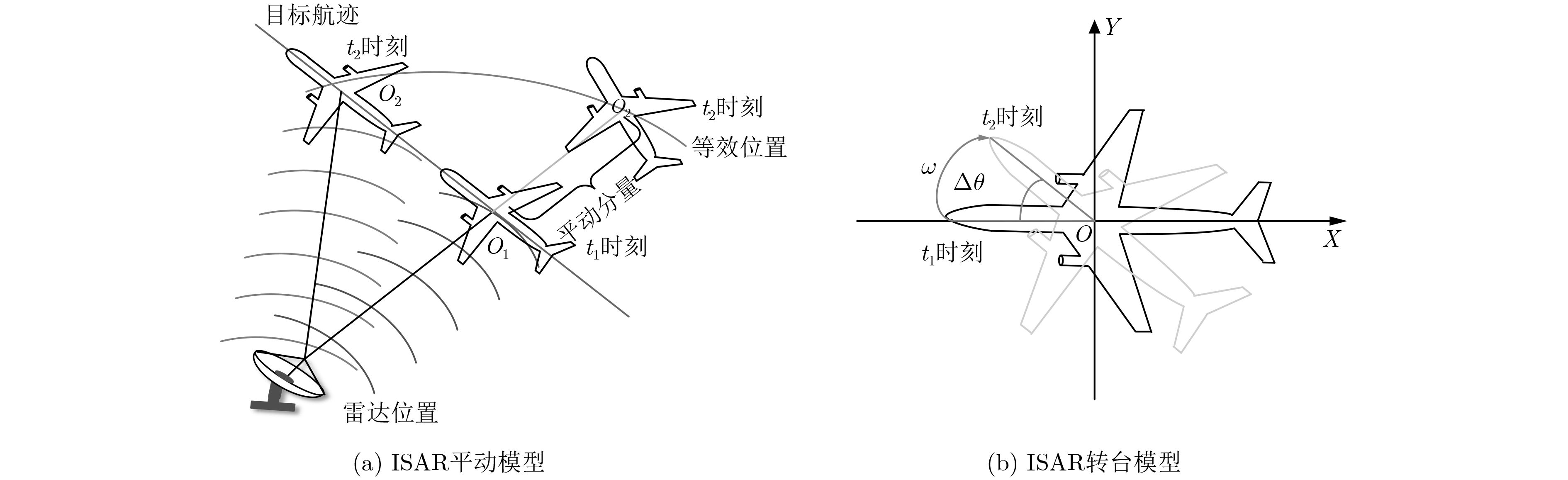
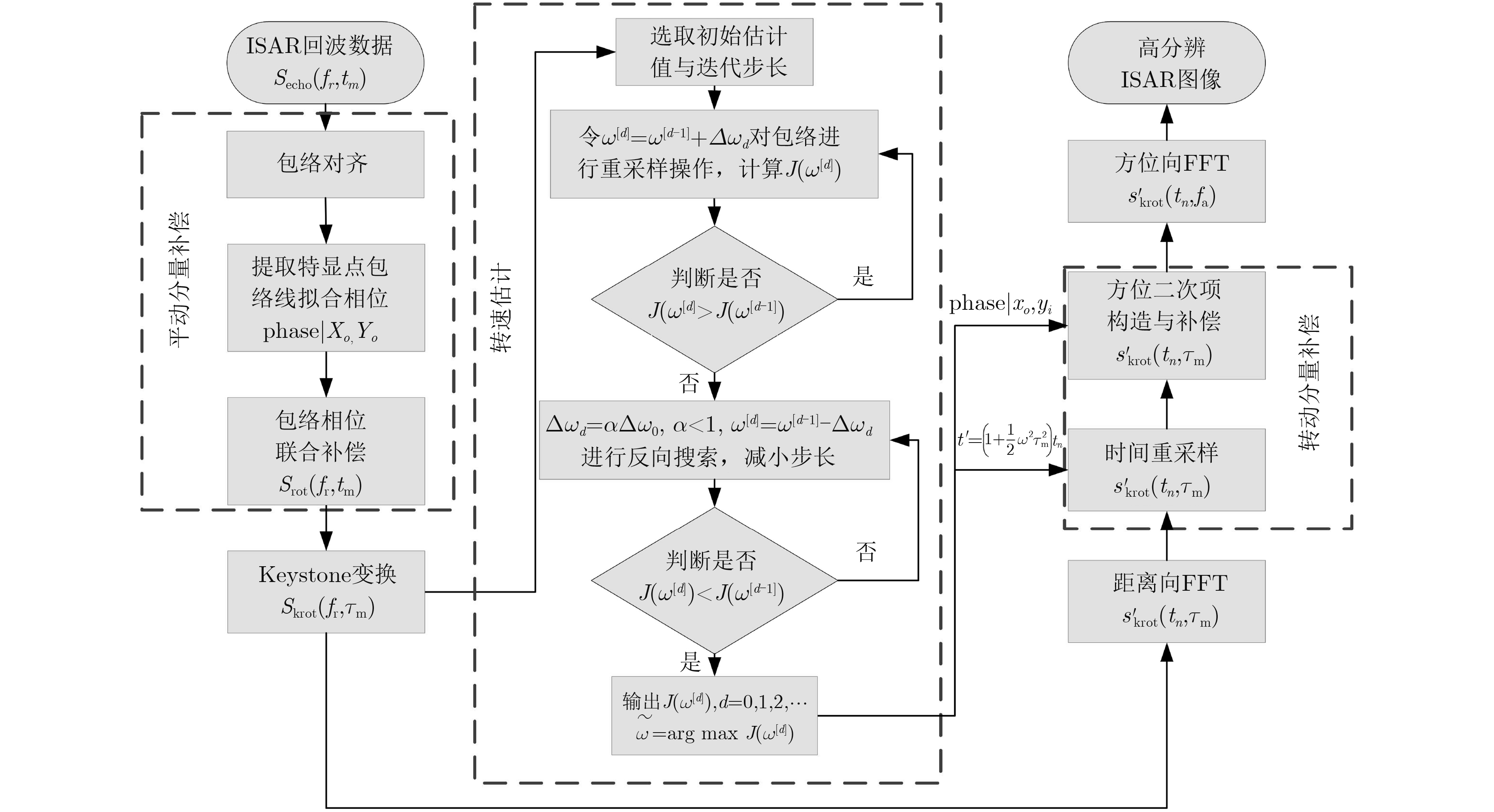
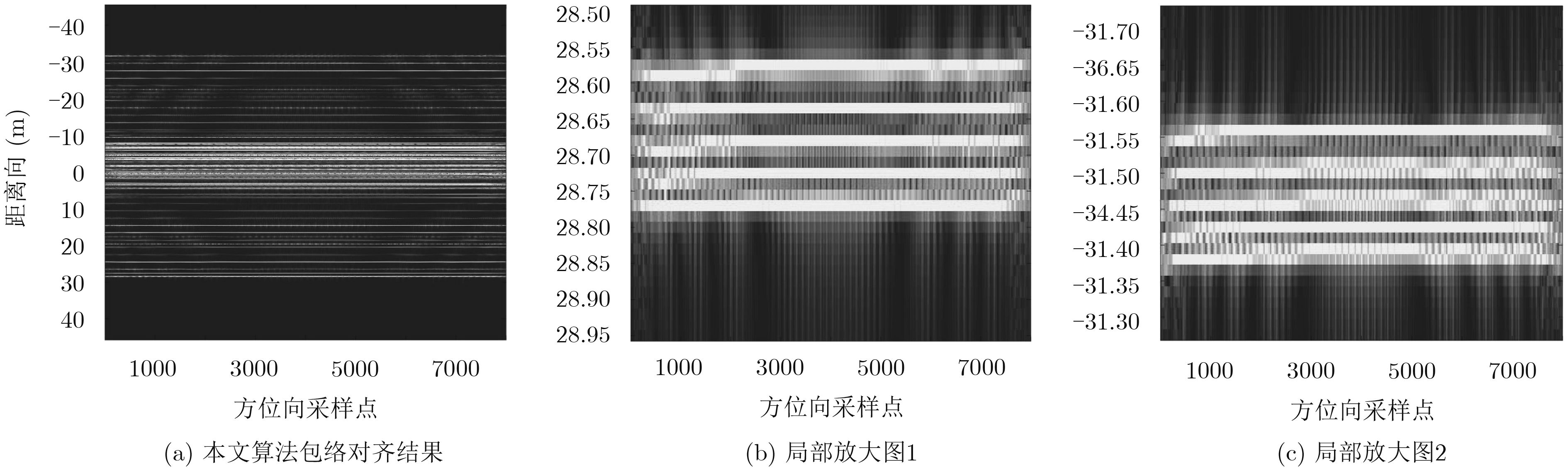
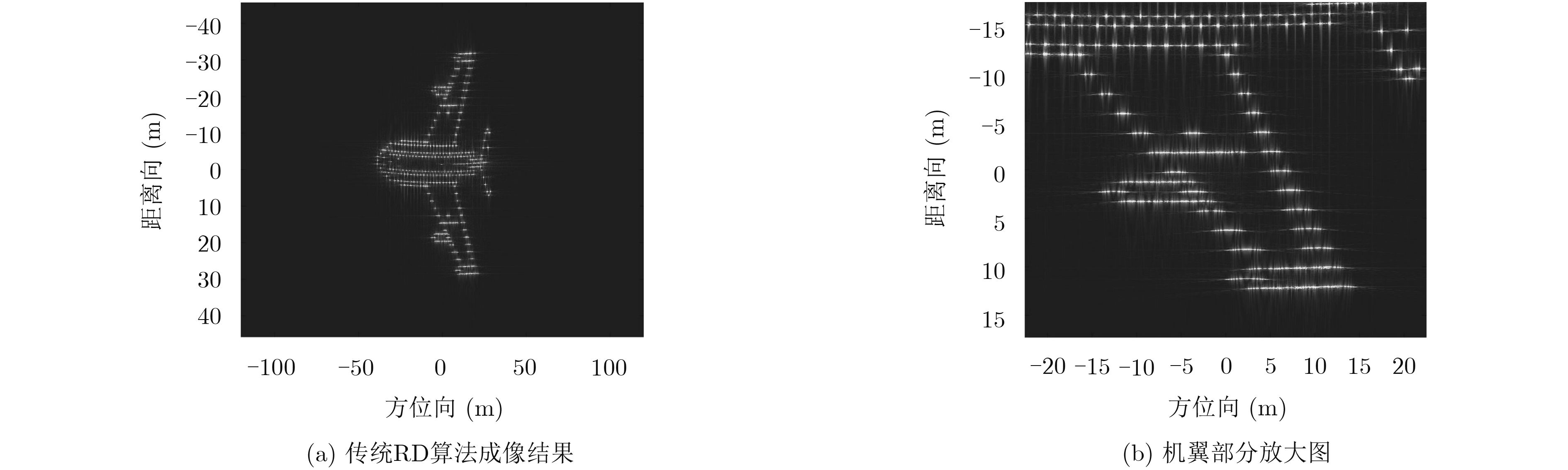
摘要: 微波光子雷达发射信号带宽大、波长短,能够实现分辨率更高的逆合成孔径雷达(ISAR)成像。但带宽大、波长小的回波信号也导致传统成像算法对目标转动分量的近似不成立,使得传统算法无法应用。在微波光子雷达成像中,目标转动分量在回波包络中形成空变的距离弯曲项,在方位相位中形成空变的2次相位误差,导致ISAR图像散焦。该文针对微波光子雷达系统提出一种新的ISAR成像算法,该算法同时考虑了目标转动分量对回波包络和相位的影响,以包络相关值为目标函数值迭代估计目标转速,根据转速估计值,在距离向进行重采样对齐包络,在方位向构造空变的方位补偿函数校正转动相位。仿真和实测数据的处理结果证明了该算法的有效性。Abstract: Microwave photonics radar generates signals with large bandwidth and small wavelength. It has capability of ultra-high resolution of Inverse Synthetic Aperture Radar(ISAR) image. Because the approximation of rotational components is not tenable, traditional ISAR imaging algorithm is not suitable to microwave photonics radar. In the microwave photonics radar imaging, the rotational components result in range curvature and quadratic phase error changing with distance. To solve this problem, an effective ISAR imaging algorithm is put forward which considers the influence of the target’s rotational component to echo envelope and phase. The value of envelope correlation is take as objective function and the target’s rotate speed is estimated by iteration; The range curvature is corrected by time resampling; The quadratic phase error is compensated by azimuth compensation function. Both simulated and real-measured data experimental results confirm the effectiveness of the proposed algorithm.
-
表 1 不同频段雷达成像误差分析
信号频段 发射带宽(GHz) 中心频率(GHz) 距离分辨率(m) $\Delta R$(m) $\Delta P$(rad) L波段 0.3 1.5 0.500 0.6 3 C波段 0.5 6.0 0.300 0.6 12 X波段 1.0 10.0 0.150 0.6 20 微波光子 10.0 35.0 0.015 0.6 70  下载: 导出CSV
下载: 导出CSV
表 2 仿真数据参数
信号带宽 载频 脉冲宽度 脉冲重复频率 采样率 参考斜距 目标速度 观测时间 10 GHz 35 GHz 150 μs 6000 Hz 500 MHz 750 m 83 m/s 1.33 s
下载: 导出CSV
-
保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005: 6–70.BAO Zheng, XING Mengdao, and WANG Tong. Radar Imaging Techniques[M]. Beijing: Publishing House of Electronic Industry, 2005: 6–70. 田跃龙, 刘志国. 微波光子雷达技术综述[J]. 电子科技, 2017, 30(5): 193–198. doi: 10.16180/j.cnki.issn1007-7820.2017.05.052TIAN Yuelong and LIU Zhiguo. A review of photonics-based radar techniques[J]. Electronic Science and Technology, 2017, 30(5): 193–198. doi: 10.16180/j.cnki.issn1007-7820.2017.05.052 PÉREZ D, GASULLA I, CAPMANY J, et al. Integrated microwave photonics: the quest for the universal programmable processor[C]. Proceedings of 2016 IEEE Photonics Society Summer Topical Meeting Series, Newport Beach, USA, 2016: 144–145. WU Tingwei, ZHANG Chongfu, ZHOU Heng, et al. Photonic microwave waveforms generation based on frequency and time-domain synthesis[J]. IEEE Access, 2018, 6: 34372–34379. doi: 10.1109/ACCESS.2018.2842250 GRODENSKY D, KRAVITZ D, and ZADOK A. Ultra-wideband microwave-photonic noise radar based on optical waveform generation[J]. IEEE Photonics Technology Letters, 2012, 24(10): 839–841. doi: 10.1109/LPT.2012.2188889 XIAO Xuedi, LI Shangyuan, CHEN Boyu, et al. A microwave photonics-based inverse synthetic aperture radar system[C]. Proceedings of 2017 Conference on Lasers and Electro-Optics, San Jose, USA, 2017: 1–2. GUO Qingshui, ZHANG Fangzheng, WANG Ziqian, et al. High-resolution and real-time inverse synthetic aperture imaging based on a broadband microwave photonic radar[C]. Proceedings of 2017 International Topical Meeting on Microwave Photonics, Beijing, China, 2017: 1–3. CHEN C C and ANDREWS H C. Target-motion-induced radar imaging[J]. IEEE Transactions on Aerospace and Electronic Systems, 1980, AES-16(1): 2–14. doi: 10.1109/TAES.1980.308873 ZHU Daiyin, WANG Ling, YU Yusheng, et al. Robust ISAR range alignment via minimizing the entropy of the average range profile[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(2): 204–208. doi: 10.1109/LGRS.2008.2010562 徐刚, 杨磊, 张磊, 等. 一种加权最小熵的ISAR自聚焦算法[J]. 电子与信息学报, 2011, 33(8): 1809–1815. doi: 10.3724/SP.J.1146.2010.01153XU Gang, YANG Lei, ZHANG Lei, et al. Weighted minimum entropy autofocus algorithm for ISAR imaging[J]. Journal of Electronics &Information Technology, 2011, 33(8): 1809–1815. doi: 10.3724/SP.J.1146.2010.01153 符吉祥, 孙光才, 邢孟道. 一种大转角ISAR两维自聚焦平动补偿方法[J]. 电子与信息学报, 2017, 39(12): 2889–2898. doi: 10.11999/JEIT170303FU Jixiang, SUN Guangcai, and XING Mengdao. A two dimensional autofocus translation compensation method for wide-angle ISAR imaging[J]. Journal of Electronics &Information Technology, 2017, 39(12): 2889–2898. doi: 10.11999/JEIT170303 盛佳恋. ISAR高分辨成像和参数估计算法研究[D]. [博士论文], 西安电子科技大学, 2016: 61–76.SHENG Jialian. Study on ISAR high resolution imaging and parameter estimation techniques[D]. [Ph.D. dissertation], Xidian University, 2016: 61–76. MARTORELLA M. Novel approach for ISAR image cross-range scaling[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(1): 281–294. doi: 10.1109/TAES.2008.4517004 王勇, 姜义成. 一种估计ISAR成像转角的新方法[J]. 电子与信息学报, 2007, 29(3): 521–523.WANG Yong and JIANG Yicheng. A new method for estimating the rotation angle of ISAR image[J]. Journal of Electronics &Information Technology, 2007, 29(3): 521–523. 张昆帆, 裴喜龙, 党同心, 等. 基于频谱包络自相关的ISAR转角估计方法[J]. 系统工程与电子技术, 2014, 36(8): 1511–1516. doi: 10.3969/j.issn.1001-506X.2014.08.11ZHANG Kunfan, PEI Xilong, DANG Tongxin, et al. Estimating method for the rotation angle of ISAR image based on spectral envelope correlation[J]. Systems Engineering and Electronics, 2014, 36(8): 1511–1516. doi: 10.3969/j.issn.1001-506X.2014.08.11 SHENG Jialian, DUAN Jia, XING Mengdao, et al. Cross-range scaling combining motion compensation for ISAR imaging[C]. Proceedings of IET International Radar Conference 2013, Xi’an, China, 2013: 1–6. 陈倩倩, 徐刚, 李亚超, 等. 短孔径ISAR方位定标[J]. 电子与信息学报, 2013, 35(8): 1854–1861. doi: 10.3724/SP.J.1146.2012.01252CHEN Qianqian, XU Gang, LI Yachao, et al. Cross-range scaling for ISAR with short aperture data[J]. Journal of Electronics &Information Technology, 2013, 35(8): 1854–1861. doi: 10.3724/SP.J.1146.2012.01252 何兴宇, 童宁宁, 贺吉峰. 基于成像序列的弹道目标ISAR图像横向定标[J]. 激光与红外, 2014, 44(12): 1374–1378. doi: 10.3969/j.issn.1001-5078.2014.12.017HE Xingyu, TONG Ningning, and HE Jifeng. Cross-range scaling of ISAR imaging for ballistic target based on image sequence[J]. Laser &Infrared, 2014, 44(12): 1374–1378. doi: 10.3969/j.issn.1001-5078.2014.12.017 KIM M, WU Guorong, YAP P T, et al. A general fast registration framework by learning deformation-appearance correlation[J]. IEEE Transactions on Image Processing, 2012, 21(4): 1823–1833. doi: 10.1109/TIP.2011.2170698 许志伟, 张磊, 邢孟道. 基于特征配准的ISAR图像方位定标方法[J]. 电子与信息学报, 2014, 36(9): 2173–2179. doi: 10.3724/SP.J.1146.2013.01590XU Zhiwei, ZHANG Lei, and XING Mengdao. A novel cross-range scaling algorithm for ISAR images based on feature registration[J]. Journal of Electronics &Information Technology, 2014, 36(9): 2173–2179. doi: 10.3724/SP.J.1146.2013.01590 LI Y, WU R, XING M, et al. Inverse synthetic aperture radar imaging of ship target with complex motion[J]. IET Radar, Sonar & Navigation, 2008, 2(6): 395–403. doi: 10.1049/iet-rsn:20070101 -

 下载:
下载:





图(11) / 表(3)
计量
- 文章访问数: 2662
- HTML全文浏览量: 1507
- PDF下载量: 147
- 被引次数: 0
