

Fast Scene Matching Method Based on Scale Invariant Feature Transform
-
摘要:
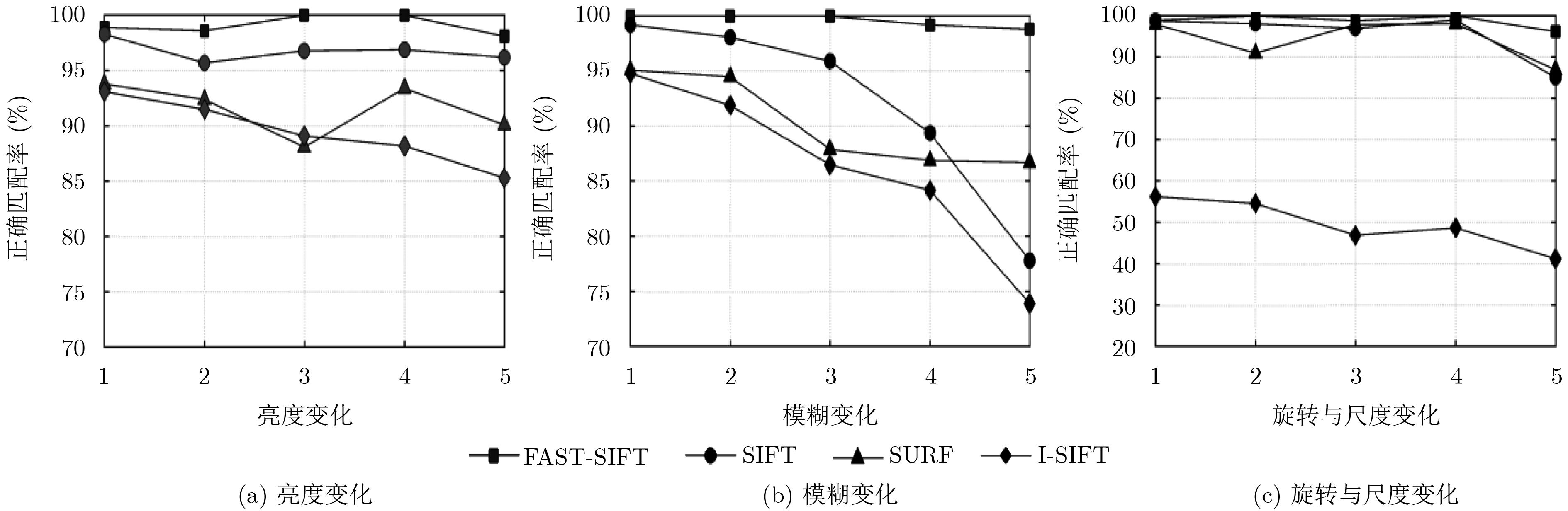
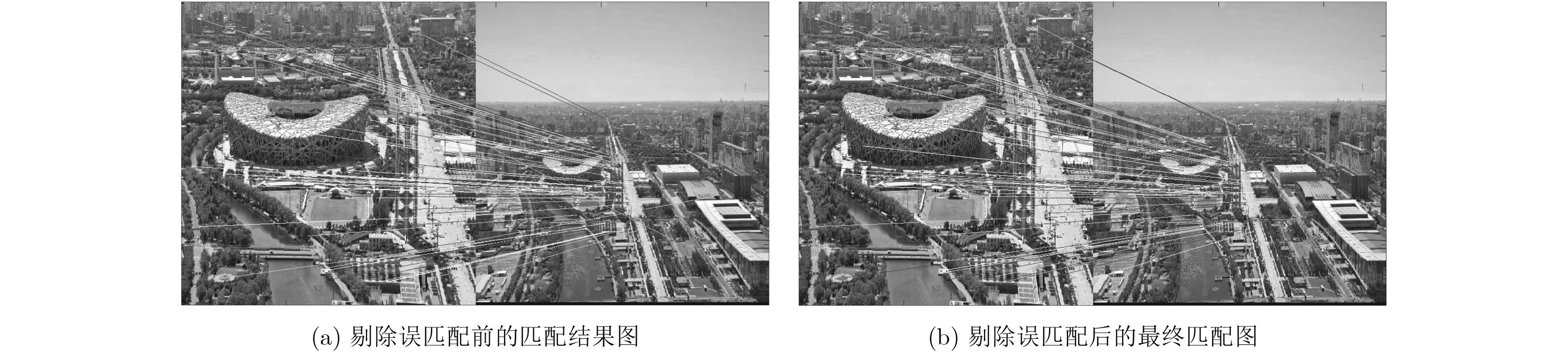
传统基于特征的景象匹配方法存在冗余点多、匹配精度低等问题,难以同时满足实时性及鲁棒性要求,对此,论文提出一种基于尺度不变特征变换(SIFT)的快速景象匹配方法。在特征提取阶段,采用高速分段特征检测器(FAST)在多尺度检测角点作为初始特征,经过高斯差分(DOG)算子在尺度空间中进行特征的2次筛选,简化原有遍历式的特征搜索过程;在特征匹配阶段,采用仿射模型模拟变换关系建立几何约束条件,克服SIFT算法由于忽略几何信息而产生的误匹配。实验表明:该方法在匹配精度和实时性方面均优于SIFT算法,且对光照、模糊、尺度等变换具有良好的鲁棒性,能够更好地实现景象匹配。
Abstract:The traditional feature-based image matching method has many problems such as many redundant points and low matching accuracy, which can hardly meet the real-time and robustness requirements. In this regard, a fast scene matching method based on Scale Invariant Feature Transform (SIFT) is proposed. In the feature detection phase, FAST (Features from Accelerated Segment Test) is used to detect characteristics in multi-scale, after then, combining with Difference Of Gauss (DOG) operators to filter characteristics again. From this, the feature search process is simplified. In feature matching phase, the affine transformation model is used to simulate the transformation relation and establish the geometric constraint, to overcome the mismatching because of ignoring the geometric information. The experimental results show that the proposed method is superior to the SIFT in efficiency and precision, also has good robustness to light, blur and scale transformation, achieves scene matching better.
-
表 1 相关性实验数据
图像 DOG特征点数 FAST特征点数 DOG∩FAST 重复率(%) Img1 2261 3531 627 27.7 Img2 1840 2276 418 22.7 Img3 3195 2168 711 32.8 Img4 2020 1523 473 23.4 Img5 8143 8615 3013 37.0 Img6 7788 9176 3060 39.3 Img7 2812 1491 573 38.4 Img8 3214 2003 645 32.2  下载: 导出CSV
下载: 导出CSV
表 2 本文算法与SIFT算法消耗时间对比(ms)
数据集 SIFT SURF I-SIFT 特征检测时间 特征匹配时间 总时间 特征检测时间 特征匹配时间 总时间 特征检测时间 特征匹配时间 总时间 graffiti 30574 4082 34656 7727 1021 8748 13866 2984 16850 bikes 16652 2779 19431 4098 884 4982 5216 1052 6268 boat 41933 6093 48026 15010 3235 18245 34397 7923 42320 leuven 14502 2248 16750 3458 487 3945 8518 1369 9887 average 25915 3801 29716 7573 1407 8980 15499 3332 18831
下载: 导出CSV
-
张闻宇, 李智, 王勇军, 等. 基于CenSurE-star特征的无人机景象匹配算法[J]. 仪器仪表学报, 2017, 38(2): 462–470. doi: 10.19650/j.cnki.cjai.2017.02.02ZHANG Wenyu, LI Zhi, WANG Yongjun, et al. UAV scene matching algorithm based on CenSurE-star feature[J]. Chinese Journal of Scientific Instrument, 2017, 38(2): 462–470. doi: 10.19650/j.cnki.cjai.2017.02.02 BROWN L G. A survey of image registration techniques[J]. ACM Computing Surveys, 1992, 24(4): 325–376. doi: 10.1145/146370.146374 BABRI U M, TANVIR M, KHURSHID K, et al. Feature based correspondence: A comparative study on image matching algorithms[J]. International Journal of Advanced Computer Science & Applications, 2016, 7(3): 235–246. doi: 10.14569/IJACSA.2016.070329 SMITH S M and BRADY J M. SUSAN—A new approach to low level image processing[J]. International Journal of Computer Vision, 1997, 23(1): 45–78. doi: 10.1023/A:1007963824710 LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91–110. doi: 10.1023/B:VISI.0000029664.99615.94 李鹤宇, 王青. 一种具有实时性的SIFT特征提取算法[J]. 宇航学报, 2017, 38(8): 865–871. doi: 10.3873/j.issn.1000-1328.2017.08.011LI Heyu and WANG Qing. A real-time SIFT feature extraction algorithm[J]. Journal of Astronautics, 2017, 38(8): 865–871. doi: 10.3873/j.issn.1000-1328.2017.08.011 BAY H, ESS A, TUYTELAARS T, et al. Speeded-up robust features[J]. Computer Vision & Image Understanding, 2008, 110(3): 404–417. doi: 10.1016/j.cviu.2007.09.014 MATAS J, CHUM O, URBAN M, et al. Robust wide-baseline stereo from maximally stable extremal regions[J]. Image & Vision Computing, 2004, 22(10): 761–767. doi: 10.1016/j.imavis.2004.02.006 ROSTEN E and DRUMMOND T. Machine learning for high-speed corner detection[C] Springer-Verlag European Conference on Computer Vision, Graz, Austria, 2006: 430–443. 刘妍, 余淮, 杨文, 等. 利用SAR-FAST角点检测的合成孔径雷达图像配准方法[J]. 电子与信息学报, 2017, 39(2): 430–436. doi: 10.11999/JEIT160386LIU Yan, YU Huai, YANG Wen, et al. SAR image registration sing SAR-FAST corner detection[J]. Journal of Electronics &Information Technology, 2017, 39(2): 430–436. doi: 10.11999/JEIT160386 常旭剑, 韩燮, 熊风光, 等. 基于FAST检测及SIFT描述的特征检测算法[J]. 计算机工程与设计, 2015, 36(10): 2749–2753. doi: 10.16208/j.issn1000-7024.2015.10.028CHANG Xujian, HAN Xie, XIONG Fengguang, et al. Feature detection based on FAST detection and SIFT description[J]. Computer Engineering &Design, 2015, 36(10): 2749–2753. doi: 10.16208/j.issn1000-7024.2015.10.028 TONY L. Scale-space theory: A basic tool for analyzing structures at different scales[J]. Journal of Applied Statistics, 1994, 21(1/2): 225–270. doi: 10.1080/757582976 MIKOLAJCZYK K and SCHMID C. An affine invariant interest point detector[C]. Springer-Verlag European Conference on Computer Vision, Copenhagen, Denmark, 2002: 128–142. ELMASHAD S Y and SHOUKRY A. A more robust feature correspondence for more accurate image recognition[C]. IEEE Computer and Robot Vision. Montreal, Canada, 2014: 181–188. KANNALA J, RAHTU E, HEIKKILA J, et al. A new method for affine registration of images and point sets[J]. Lecture Notes in Computer Science, 2005, 40(35): 224–234. doi: 10.1007/11499145_25 王华夏, 程咏梅, 刘楠. 面向山地区域光照变化下的鲁棒景象匹配方法[J]. 航空学报, 2017, 38(10): 188–200. doi: 10.7527/S1000-6893.2017.321101WANG Huaxia, CHENG Yongmei, LIU Nan. A robust scene matching method for mountainous regions with illumination variation[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(10): 188–200. doi: 10.7527/S1000-6893.2017.321101 -


 下载:
下载:



计量
- 文章访问数: 2132
- HTML全文浏览量: 900
- PDF下载量: 79
- 被引次数: 0
