

Direct Position Determination for Coherently Distributed Noncircular Source Based on Symmetric Shift Invariance
-
摘要:
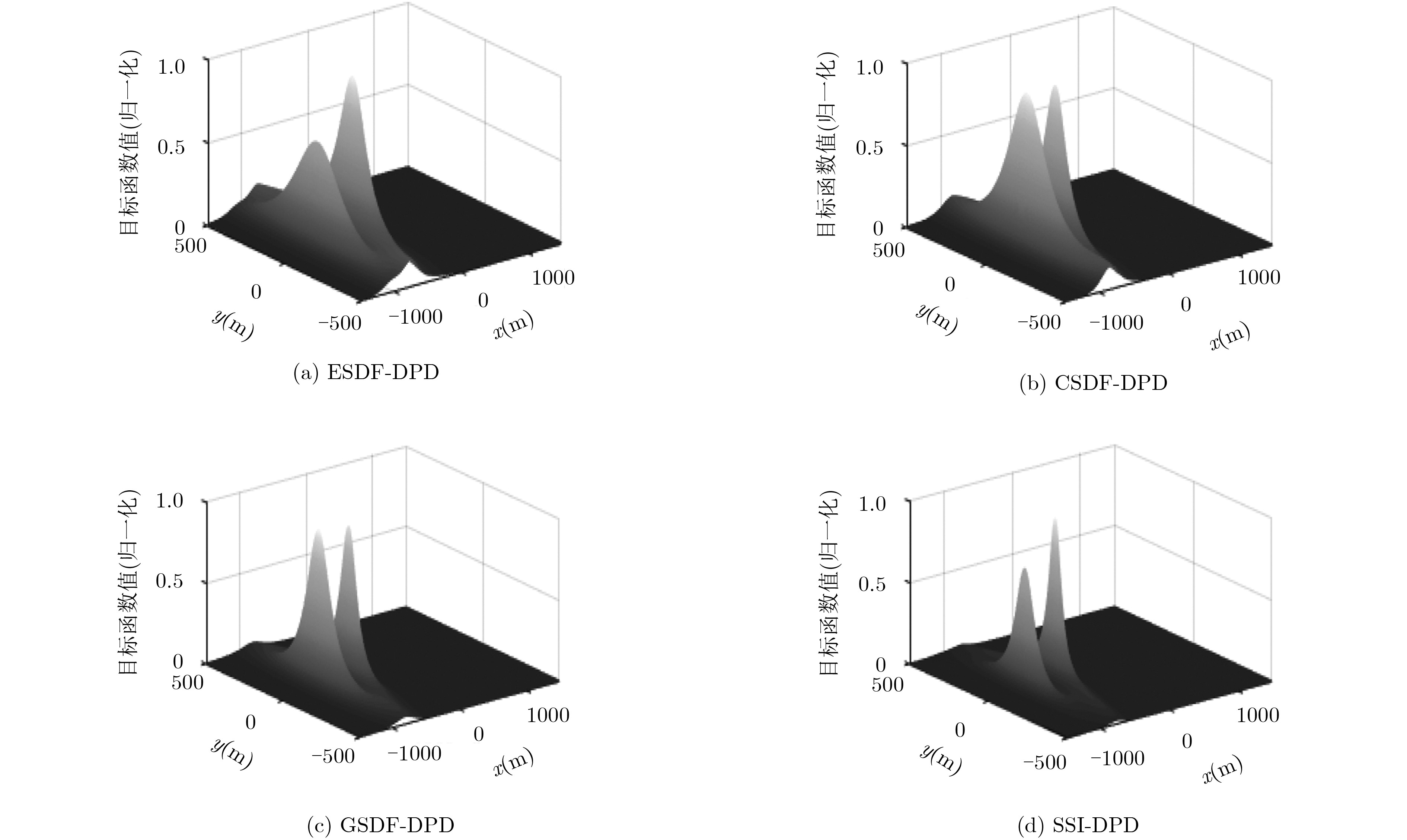
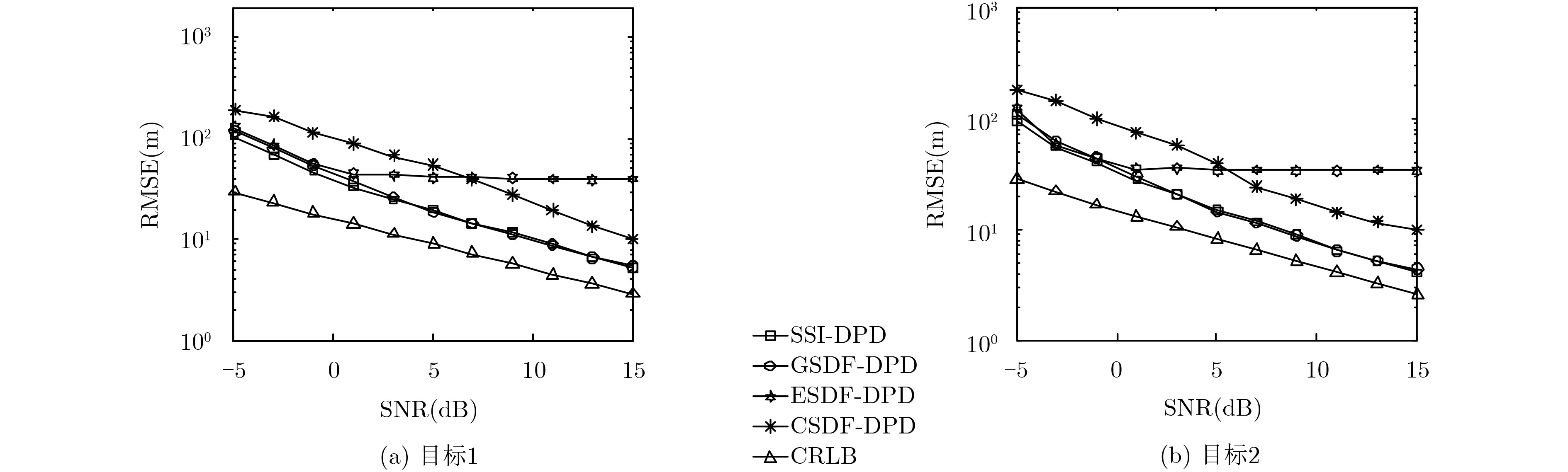
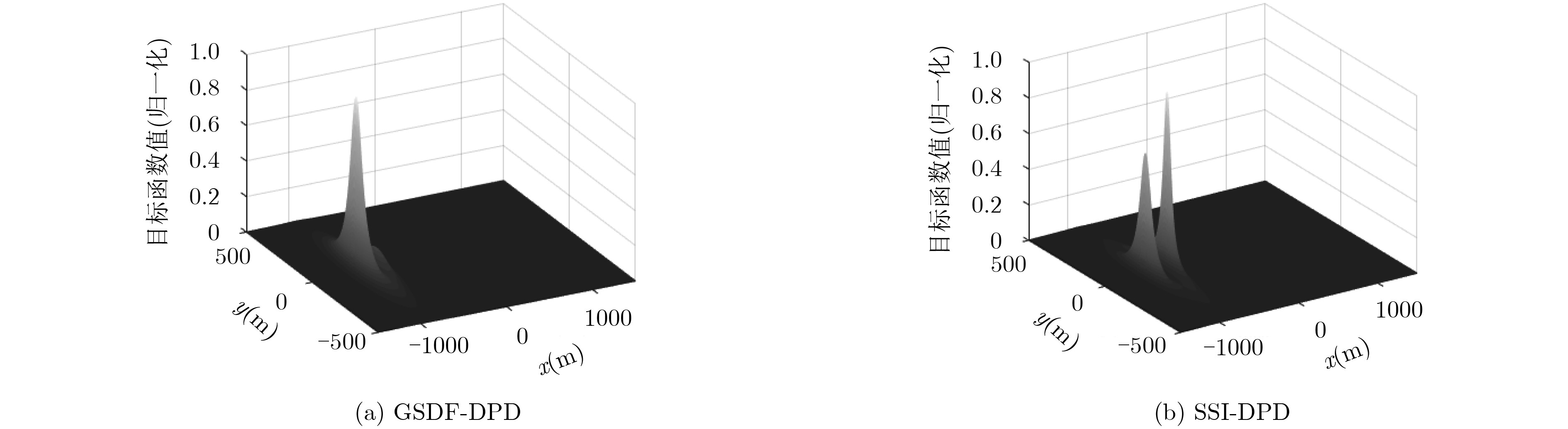
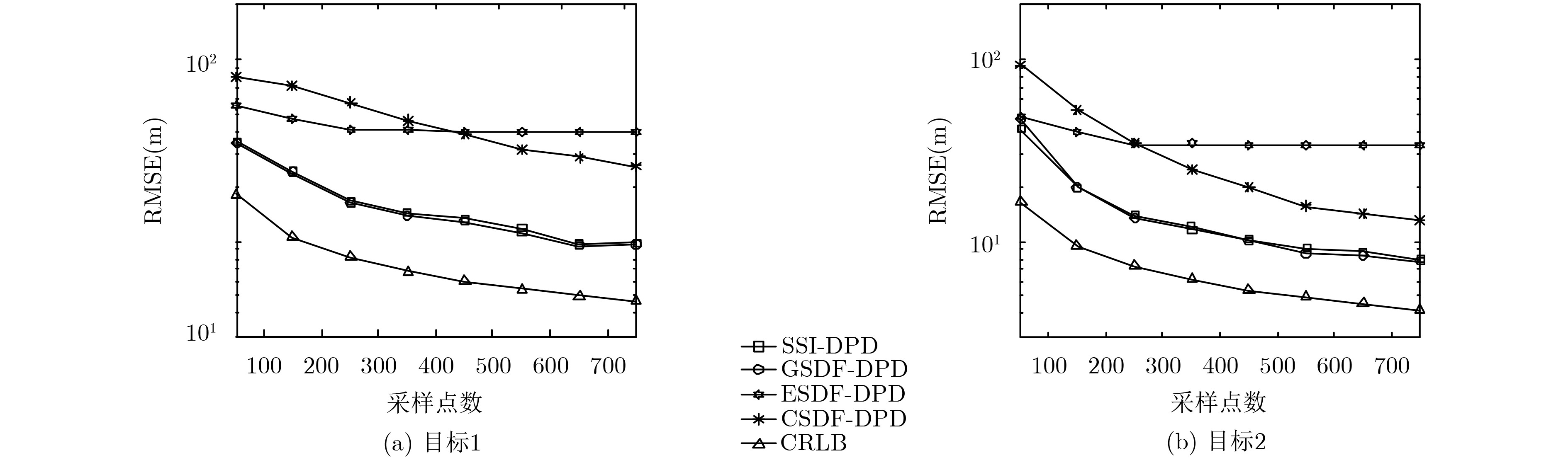
针对现有相干分布源直接定位方法中存在的依赖分布模型、计算复杂等问题,该文提出一种基于非圆信号特征的对称旋转不变直接定位算法。该方法首先根据分布源参数化假设建立基于数据域信息的直接位置估计模型,并利用非圆信号特征扩展接收信号的协方差矩阵。然后针对中心对称阵列,证明了相干分布源的确定性角信号分布函数矢量具有对称特性,基于这一特征建立了扩展方向矢量的旋转不变关系;构造了融合多个观测站信息的目标函数,直接估计目标位置,避免了对分布模型的依赖,且降低了待估计参数维度。仿真结果表明,与现有相干分布源定位算法相比,所提算法提高了分布源位置估计精度和效率,避免了对分布模型的依赖,更具实用价值。
Abstract:The existing Direct Position Determination (DPD) algorithm of Coherently Distributed (CD) sources rely on the distribution model of CD sources with huge computation cost, which is not practical. To improve further the localization performance, a novel DPD algorithm of CD sources that profits from the characteristics of noncircular signals is proposed based on the symmetric shift invariance of the centrosymmetric array. With the parameterization assumption of CD sources, the direct position determination model is firstly constructed by combining the characteristics of noncircular signals. Then, it is proved that for any centrosymmetric array, the generalized steering vector of CD sources has the property of symmetric shift invariance. Base on this characteristic, the positions of CD sources are directly estimated by fusing the information of all observation stations with no need to consider the distribution model, which reduces the dimension of the parameter to be estimated. Simulation results validate that, compared with the existing localization algorithms of CD sources, the proposed algorithm improves the localization accuracy, and avoids the dependence on the distribution model of CD sources, which is of great practical value.
-
杨峰, 张婉莹. 一种多模型贝努利粒子滤波机动目标跟踪算法[J]. 电子与信息学报, 2017, 39(3): 634–639. doi: 10.11999/JEIT160467YANG Feng and ZHANG Wanying. Multiple model bernoulli particle filter formaneuvering target tracking[J]. Journal of Electronics &Information Technology, 2017, 39(3): 634–639. doi: 10.11999/JEIT160467 逯志宇, 王大鸣, 王建辉, 等. 基于时频差的正交容积卡尔曼滤波跟踪算法[J]. 物理学报, 2015, 64(15): 25–32. doi: 10.7498/aps.64.150502LU Zhiyu, WANG Daming, WANG Jianhui, et al. A tracking algorithm based on orthogonal cubature Kalman filter with TDOA and FDOA[J]. Acta Physica Sinica, 2015, 64(15): 25–32. doi: 10.7498/aps.64.150502 ZHENG Zhi, LI Guangjun, and TENG Yunlong. 2D DOA estimator for multiple coherently distributed sources using modified propagator[J]. Circuits, System & Signal Processing, 2012, 31: 255–270. LEE Y, CHOI J, SONG I, et al. Distributed sources modeling and direction-of-arrival estimation techniques[J]. IEEE Transactions on Signal Processing, 1997, 45(4): 960–969. doi: 10.1109/78.564184 WU Q, WONG K, and MENG Y. DOA estimation of point and scattered sources-vec-MUSIC[C]. Processing of IEEE Workshop on Statistical Signal and Array Processing, Quebec, Canada, 1994: 365-368. HASSANIEN A, SHAHBAZPANAHI S, and GERSHMAN A. A generalized capon estimator for localization of multiple spread sources[J]. IEEE Transactions on Signal Processing, 2004, 52(1): 280–283. doi: 10.1109/TSP.2003.820089 SIESKUL B. An asymptotic maximum likelihood for joint estimation of nominal angles and angular spreads of multiple spatially distributed sources[J]. IEEE Transactions on Vehicular Technology, 2010, 59(3): 1534–1538. doi: 10.1109/TVT.2009.2040006 GAN Lu, WANG Xiaqing, and LIAO Hongshu. DOA estimation of coherently distributed sources based on block-sparse constraint[J]. IEICE Transactions on Communication, 2012, 95(7): 2472–2476. YANG Xuemin, LI Guangjun, CHI C K, et al. Central DOA estimation of incoherently distributed noncircular sources with cross-correlation matrix[J]. Circuits Systems & Signal Processing, 2015, 34(11): 3697–3707. YANG Xuemin, ZHENG Zhi, and Hu Bin. Off-grid DOA estimation of incoherently distributed non-circular sources via generalised approximate message passing[J]. Electronics. Letters, 2016, 52(4): 262–264. doi: 10.1049/el.2015.1973 DAI Zhengliang, BA Bin, CUI Weijia, et al. Computational efficient two-dimension DOA estimation for incoherently distributed noncircular sources with automatic pairing[J]. IEEE Access, 2017, 5: 20249–20259. doi: 10.1109/ACCESS.2017.2757932 BOSSE J, FERRÉOL A, and LARZABAL P. Performance analysis of passive localization strategies: Direct one step approach versus 2 steps approach[C]. IEEE Statistical Signal Processing (SSP) Workshop, Nice, France, 2011: 701-704. 逯志宇, 任衍青, 巴斌, 等. 基于分段信号相关累加的变速度多站联合直接定位方法[J]. 物理学报, 2017, 66(2): 70–79. doi: 10.7498/aps.66.020503LU Zhiyu, REN Yanqing, BA Bin, et al. An improved direct position determination method based on correlation accumulation of short-time signals with variable velocity receivers[J]. Acta Physica Sinica, 2017, 66(2): 70–79. doi: 10.7498/aps.66.020503 王鼎, 张瑞杰, 张涛. 一种阵列互耦影响下的目标直接定位算法及其理论性能分析[J]. 电子学报, 2017, 45(5): 1130–1138. doi: 10.3969/j.issn.0372-2112.2017.05.016WANG Ding, ZHANG Ruijie, and ZHANG Tao. A direct position determination approach for radio emitters in presence of mutual coupling[J]. Acta Electronica Sinica, 2017, 45(5): 1130–1138. doi: 10.3969/j.issn.0372-2112.2017.05.016 WEISS A. Direct position determination of narrowband radio frequency transmitters[J]. IEEE Signal Processing Letters, 2004, 11(5): 513–516. doi: 10.1109/LSP.2004.826501 WANG Ding, ZHANG Gang, SHEN Caiyao, et al. A direct position determination algorithm for constant modulus signals with single moving observer[J]. Acta Aeronautica et Astronautica Sinica, 2016, 5: 1622–1633. LU Zhiyu, WAN Jianhui, BA Bin, et al. A novel direct position determination algorithm for orthogonal frequency division multiplexing signals based on the time and angle of arrival[J]. IEEE Access, 2017, 5: 25312–25321. doi: 10.1109/ACCESS.2017.2766632 YIN Jiexin, WU Yin, and WANG Ding. Direct position determination of multiple noncircular sources with a moving array[J]. Circuits Systems & Signal Processing, 2017, 36(10): 4050–4076. SHALOM O and WEISS A. Direct emitter geolocation under local scattering[J]. Signal Processing, 2015, 117: 102–114. doi: 10.1016/j.sigpro.2015.05.003 王大鸣, 任衍青, 逯志宇, 等. 分布式信源数据域直接位置估计方法[J]. 电子与信息学报, 2018, 40(2): 371–377. doi: 10.11999/JEIT170365WANG Daming, REN Yanqing, LU Zhiyu, et al. Direct position determination of the distributed source[J]. Journal of Electronics &Information Technology, 2018, 40(2): 371–377. doi: 10.11999/JEIT170365 -

 下载:
下载:



计量
- 文章访问数: 2845
- HTML全文浏览量: 851
- PDF下载量: 71
- 被引次数: 0
