

BeiDou-reflectometry Sea Wind and Wave Retrieval System and Experiment
-
摘要:
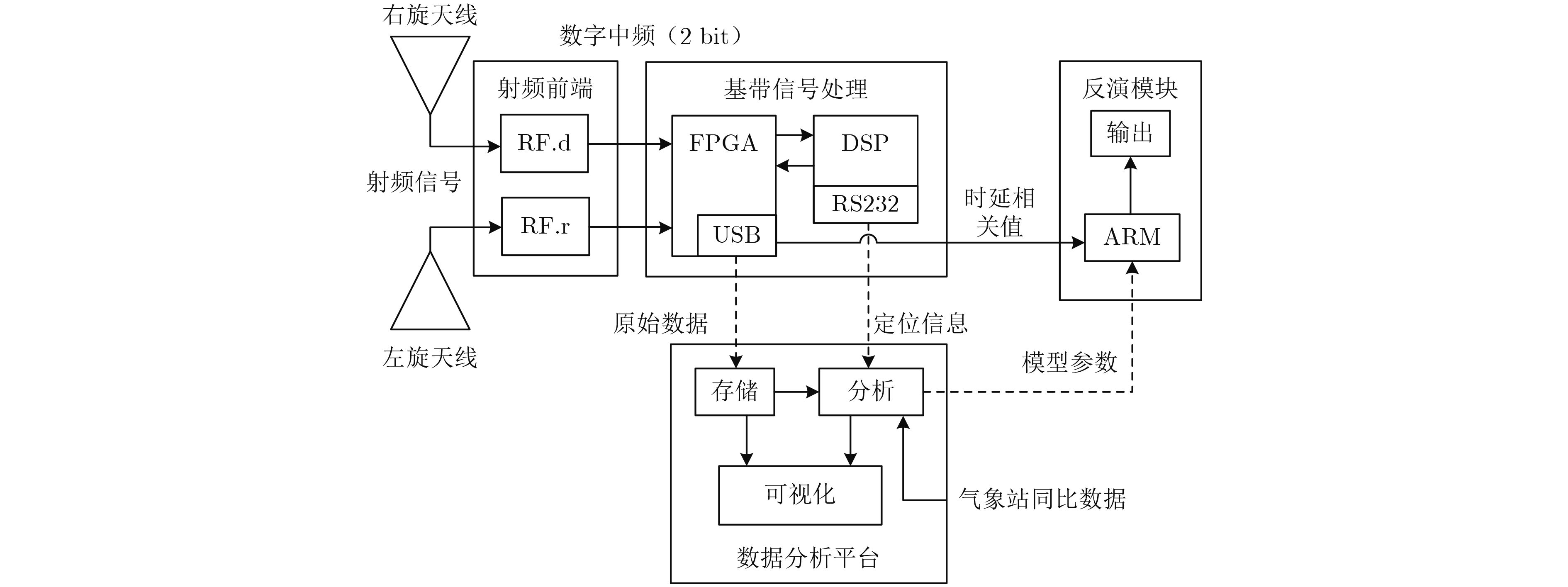
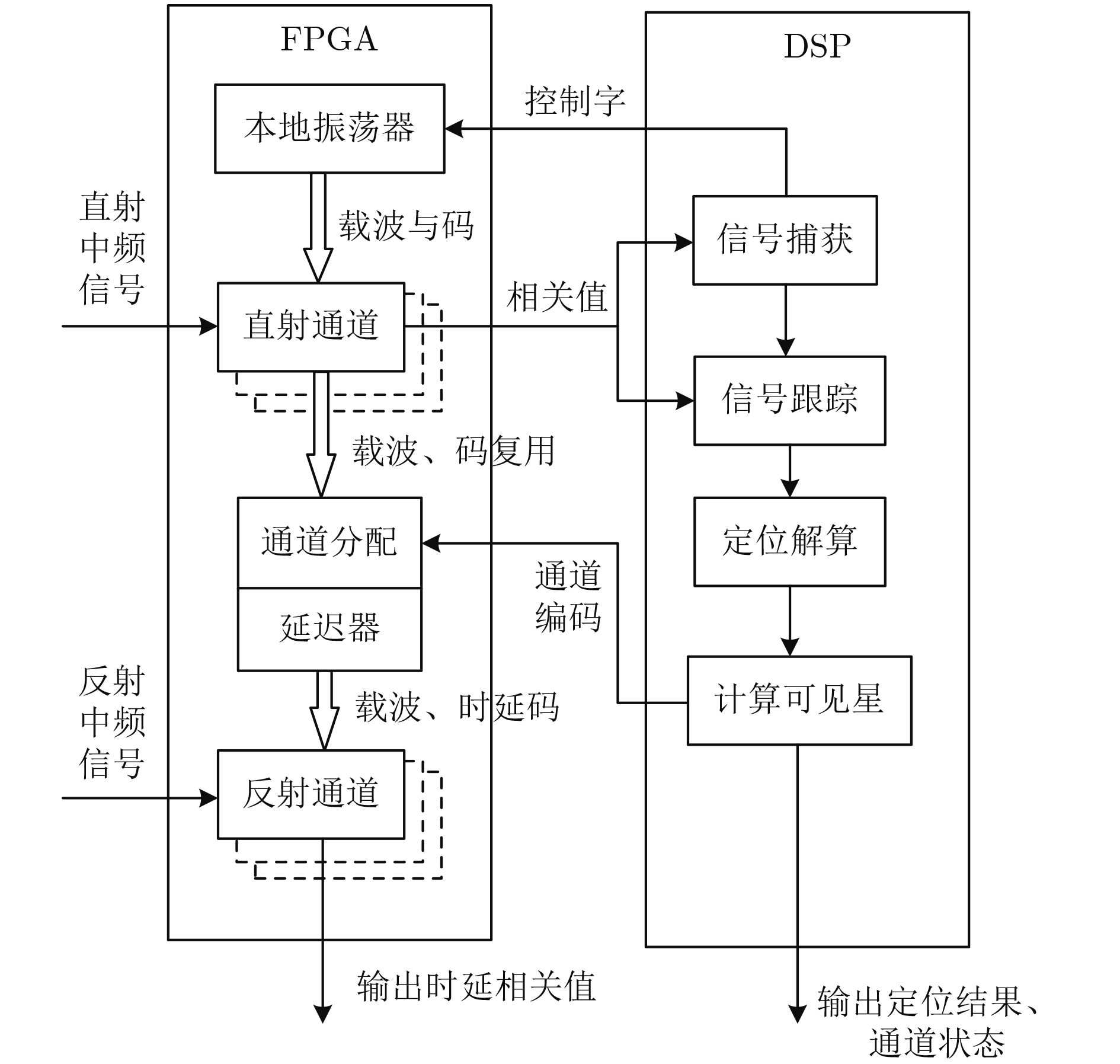
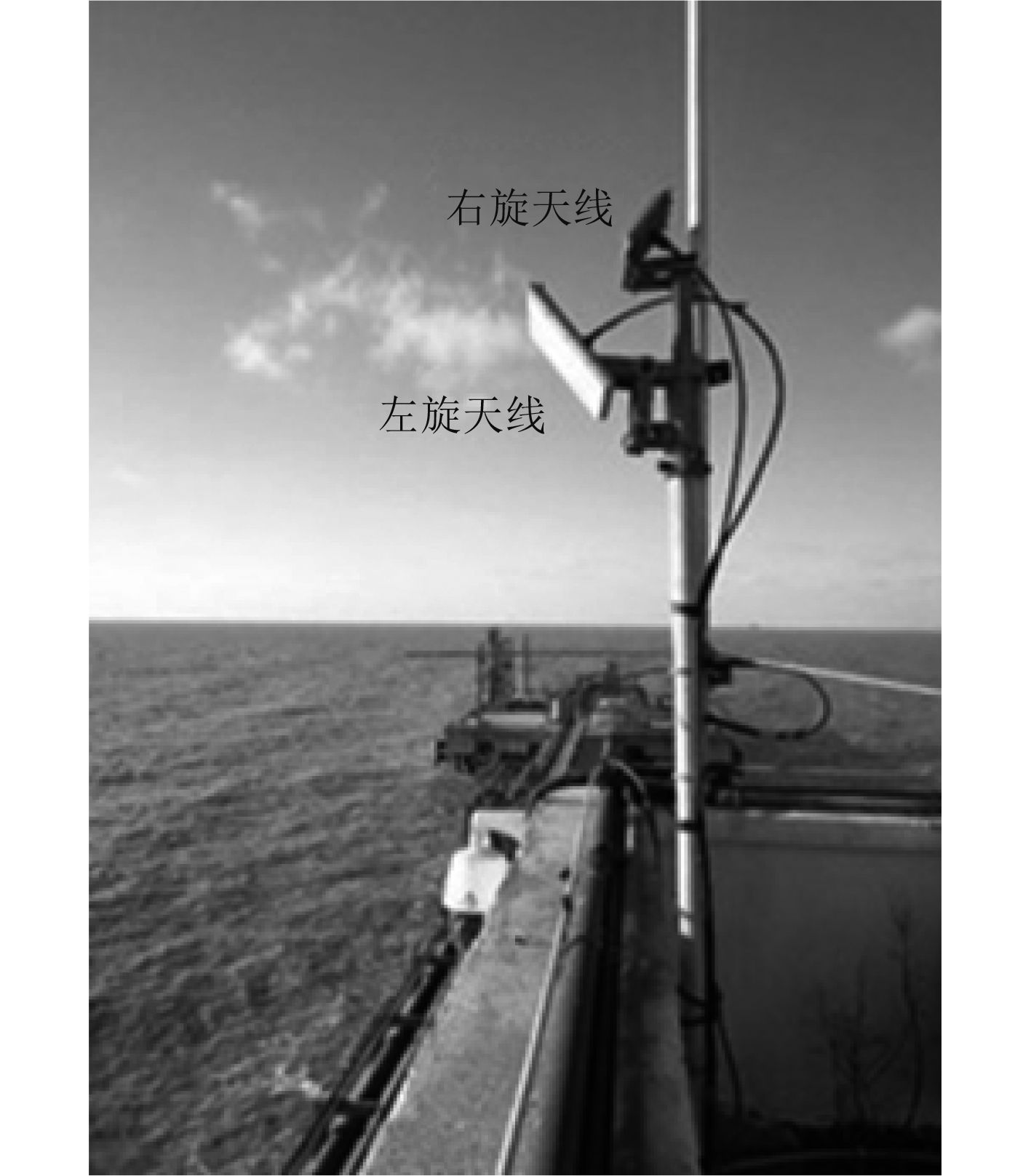
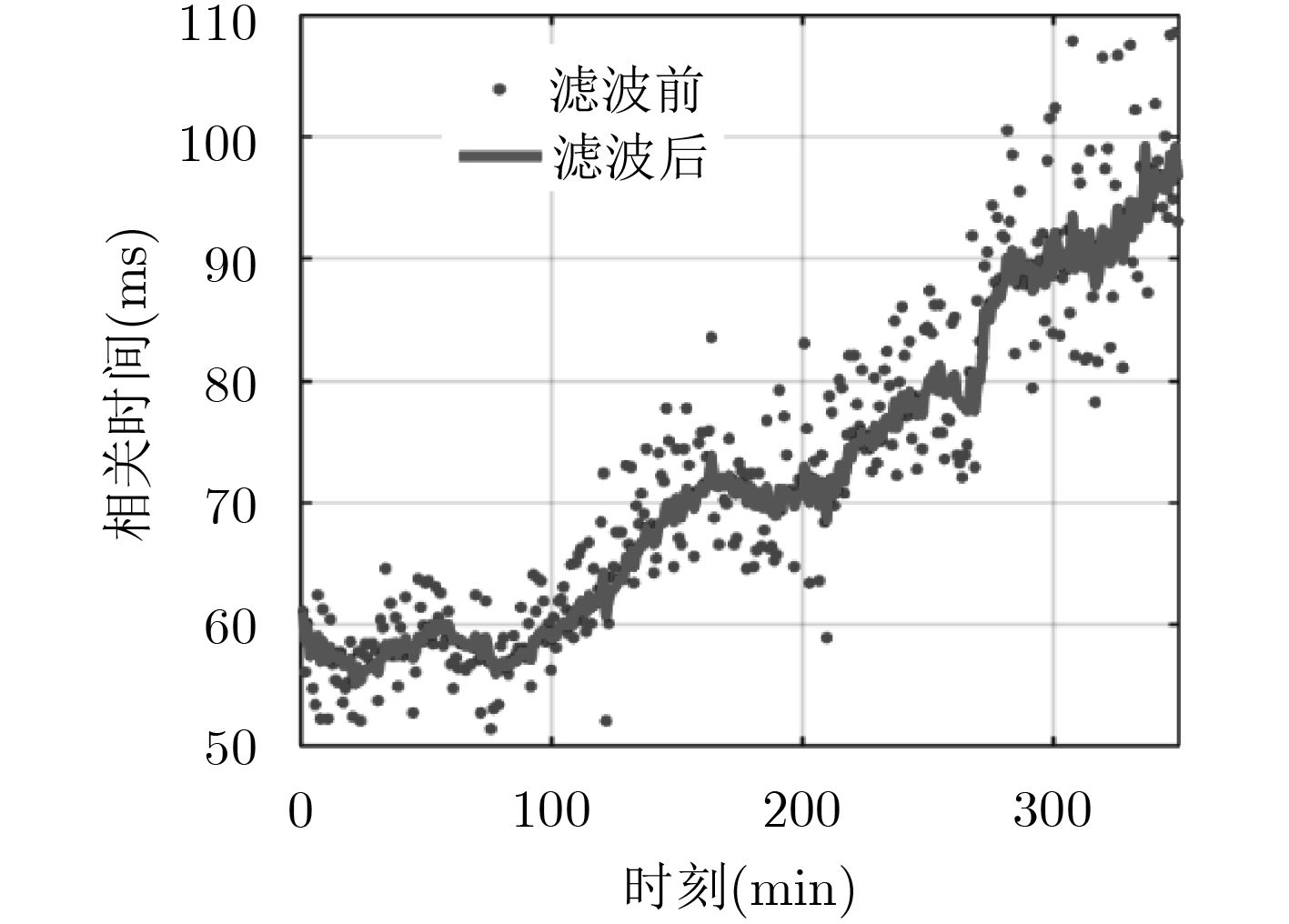
该文设计并实现了一种小型低功耗的北斗反射信号海风海浪反演系统,针对反演精度受卫星高度角影响较大的问题,提出高度角正弦值幂指数修正方法,且为降低风速突变对风速反演的影响,对风速反演模型进行了延时修正,有效提高了有效波高和风速的反演精度。为了进一步提高反演精度,提出多星联合观测和单边滤波的方法。北斗反射信号海风海浪探测试验结果表明:设计和实现的反演系统具备长期稳定运行和观测的性能;提出的反演模型和精度提升方法可以有效提高反演精度,有效波高和风速反演精度分别可达0.14 m和1.28 m/s,相比于Soulat等人提出的反演模型,分别提高了0.13 m和0.78 m/s。
Abstract:A low power and cost BeiDou-reflectometry used to retrieve Significiant Wave Height (SWH) and wind is designed and implemented. To improve the retrieval accuracy, a correction method based on the power function of the elevation angle sinusoidal and a delay correlation for the rapid change of wind speed is proposed. Moreover, combined observation of multi-satellite signals and single-side filtering for the observable are performed to improve further the retrieval accuracy. The experiment results of observating SWH and wind speed using reflected BeiDou signals show that designed and developed system could implement long-term and stable observation; the retrieval accuracies of SWH and wind speed retrieved by propsoed retrieval models and improvement methods of the retreival accuracy are 0.13 m and 1.28 m/s which are 0.13 m and 0.78 m/s higher than the methods proposed by Soulat et al.
-
表 2 不同反演方法对比
反演模型 优化算法 有效波高误差
(m)风速误差
(m/s)反比例模型 – 0.27 2.06 – 0.21 1.43 指数模型(对风速
延时修正)多星观测 0.19 1.36 平滑滤波 0.16 1.30 多星&平滑 0.14 1.28  下载: 导出CSV
下载: 导出CSV
-
MARTIN-NEIRA M. A pasive reflectometry and interferometry system (PARIS) application to ocean altimetry[J]. ESA Journal, 1993, 17(4): 331–355. SOISUVARN S, JELENAK Z, SAID F, et al. The GNSS reflectometry response to the ocean surface winds and waves[J]. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2016, 9(10): 4678–4699. doi: 10.1109/JSTARS.2016.2602703 XU Fei, SUN Xiechang, LIU Xinning, et al. The study on retrieval technique of significant wave height using airborne GNSS-R[C]. Conference of Spacecraft TT&C Technology in China, Singapore, 2016: 401–411. ZHU Yongchao, YU Kegen, ZOU Jingui, et al. Sea ice detection based on differential delay-doppler maps from UK TechDemoSat-1[J]. Sensors, 2017, 17(7): 1–18. doi: 10.3390/s17071614 王峰, 杨东凯. 星载GNSS-R辅助海洋盐度探测方法[J]. 北京航空航天大学学报, 2018, 44(1): 108–116. doi: 10.13700/j.bh.1001-5965.2017.0018WANG Feng and YANG Dongkai. Sea surface salinity determination method assisted by spaceborne GNSS-R[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(1): 108–116. doi: 10.13700/j.bh.1001-5965.2017.0018 DU Wenying, CHEN Nengcheng, and YAN Songhua. Online soil moisture retrieval and sharing using geospatial web-enabled BDS-R service[J]. Computers & Electronics in Agriculture, 2016, 121: 354–367. doi: 10.1016/j.asr.2016.11.028 GARRISON J L, KATZBERG S J, and HILL M I. Effect of sea roughness on bistatically scattered range coded signals from the Global Positioning System[J]. Geophysical Research Letters, 1998, 25(13): 2257–2260. doi: 10.1029/98GL51615 SOULAT F, CAPARRINI M, GERMAIN O, et al. Sea state monitoring using coastal GNSS‐R[J]. Geophysical Research Letters, 2004, 31(21): 133–147. doi: 10.1029/2004GL020680 ALONSO-ARROYO A, CAMPS A, PARK H, et al. Retrieval of significant wave height and mean sea surface level using the GNSS-R interference pattern technique: Results from a three-month field campaign[J]. IEEE Transactions on Geoscience & Remote Sensing, 2015, 53(6): 3198–3209. doi: 10.1109/TGRS.2014.2371540 WANG Feng, YANG Dongkai, LI Weiqiang, et al. A new retrieval method of significant wave height based on statistics of scattered BeiDou GEO signals[C]. Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+2015), Tampa, America, 2015: 3953–3957. VALENCIA E, CAMPS A, MARCHAN-HERNANDEZ J F, et al. Experimental determination of the sea correlation time using GNSS-R coherent data[J]. IEEE Geoscience & Remote Sensing Letters, 2010, 7(4): 675–679. doi: 10.1109/LGRS.2010.2046135 LI Weiqiang, FABRA F, YANG Dongkai, et al. Initial results of typhoon wind speed observation using coastal GNSS-R of BeiDou GEO satellite[J]. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2016, 9(10): 4720–4729. doi: 10.1109/JSTARS.2016.2523126 公绪艳, 张凤元, 杨东凯, 等. 基于北斗卫星反射信号的海面风速探测[J]. 现代电子技术, 2017, 40(5): 5–9. doi: 10.16652/j.issn.1004-373x.2017.05.002GONG Xuyan, ZHANG Fengyuan, YANG Dongkai, et al. Ocean surface wind speed detection based on reflected signal of Beidou satellite[J]. Modern Electronics Technique, 2017, 40(5): 5–9. doi: 10.16652/j.issn.1004-373x.2017.05.002 NOGUES-CORREIG O, GALI E C, CAMPDERROS J S, et al. A GPS-reflections receiver that computes doppler/delay maps in real time[J]. IEEE Transactions on Geoscience & Remote Sensing, 2006, 45(1): 156–174. doi: 10.1109/TGRS.2006.882257 LI Weiqiang, YANG Dongkai, ZHANG Bo, et al. Real-time processing of reflected GNSS signals for remote sensing: System and experiments[J]. The Journal of Navigation, 2011, 64(S1): 127–140. doi: 10.1017/S0373463311000403 Oceanpal Datasheet[OL]. http://www.starlab.es/products/oceanpal. 2003. 周荫清. 随机过程理论[M]. 第3版, 北京: 北京航空航天大学出版社, 2013: 64–65. WANG Xin, SUN Qiang, ZHANG Xunxie, et al. First China ocean reflection experiment using coastal GNSS-R[J]. Chinese Science Bulletin, 2008, 53(7): 1117–1120. -

 下载:
下载:






计量
- 文章访问数: 2030
- HTML全文浏览量: 771
- PDF下载量: 75
- 被引次数: 0
