

Aircraft Target Classification and Recognition Algorithm Based on Measured Data
-
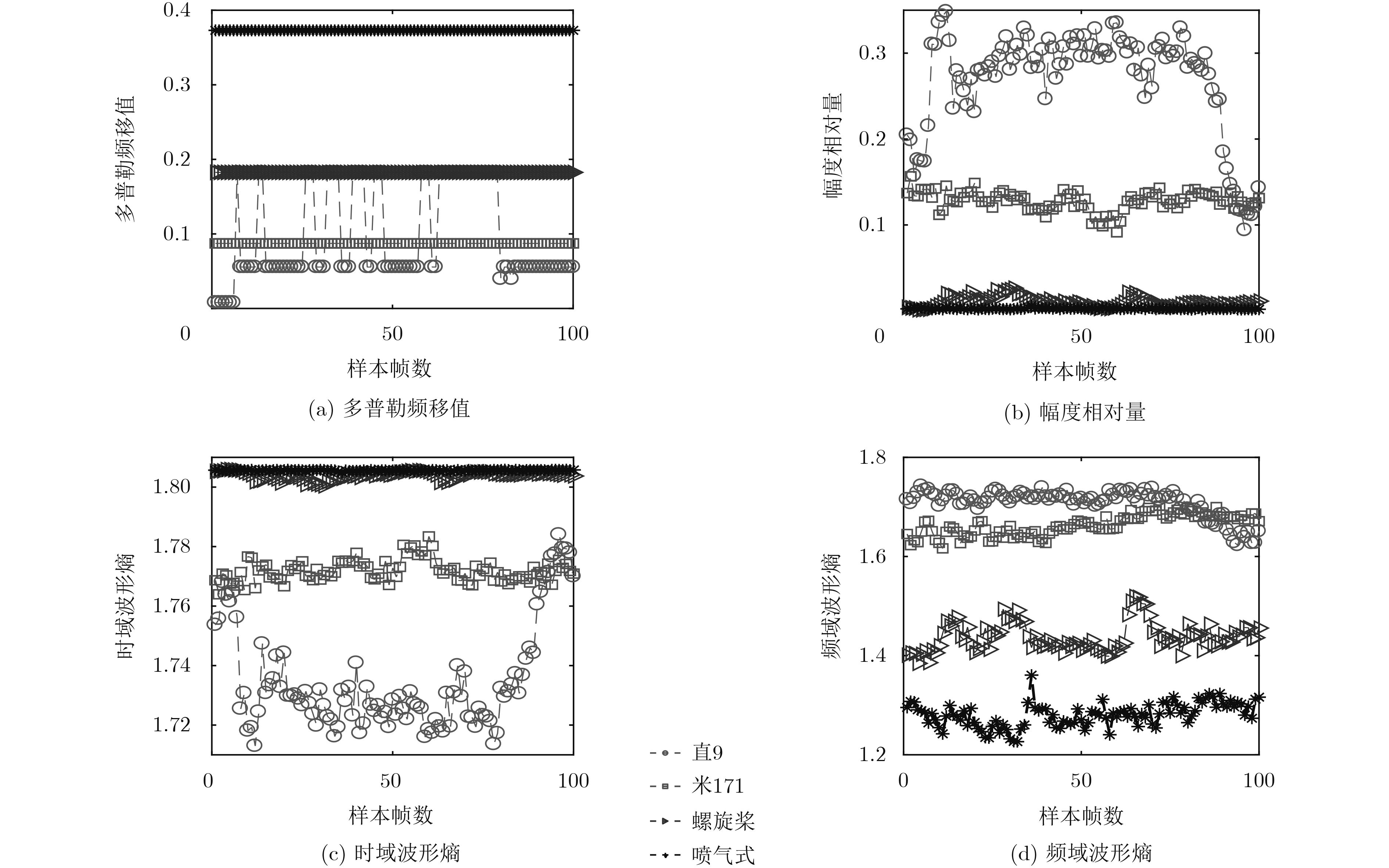
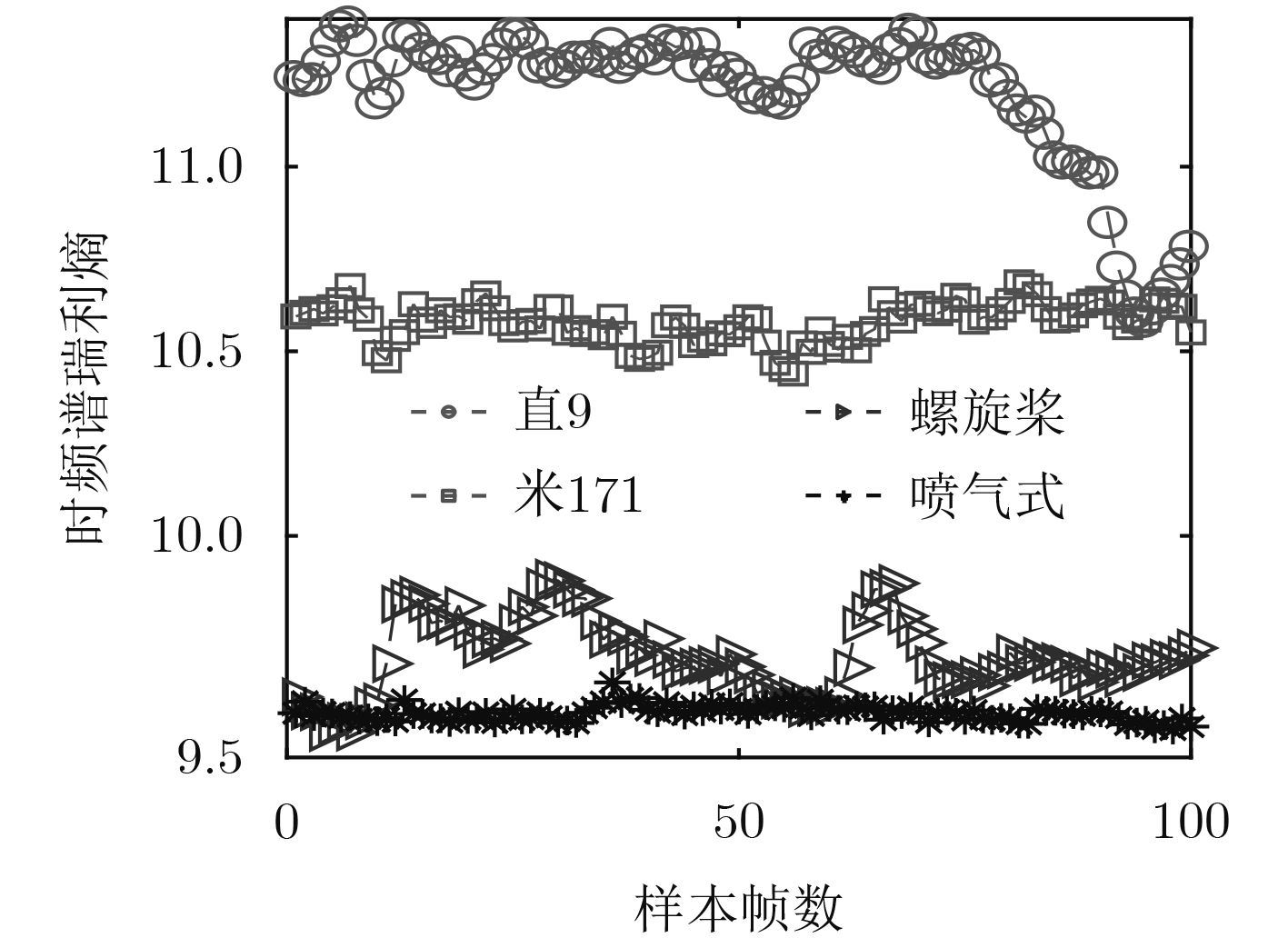
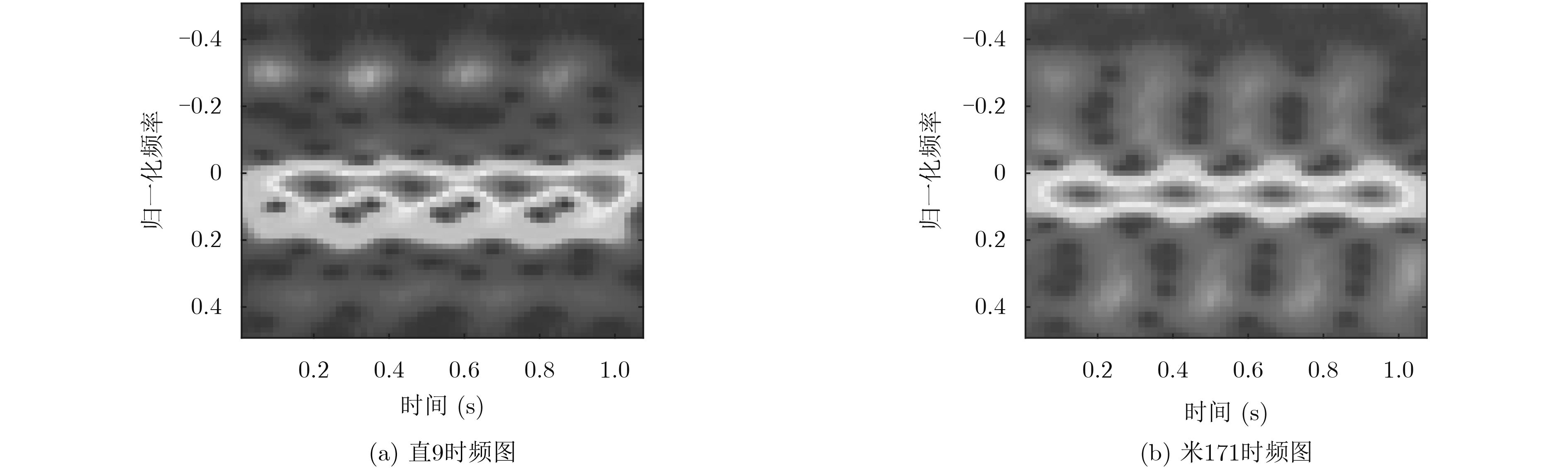
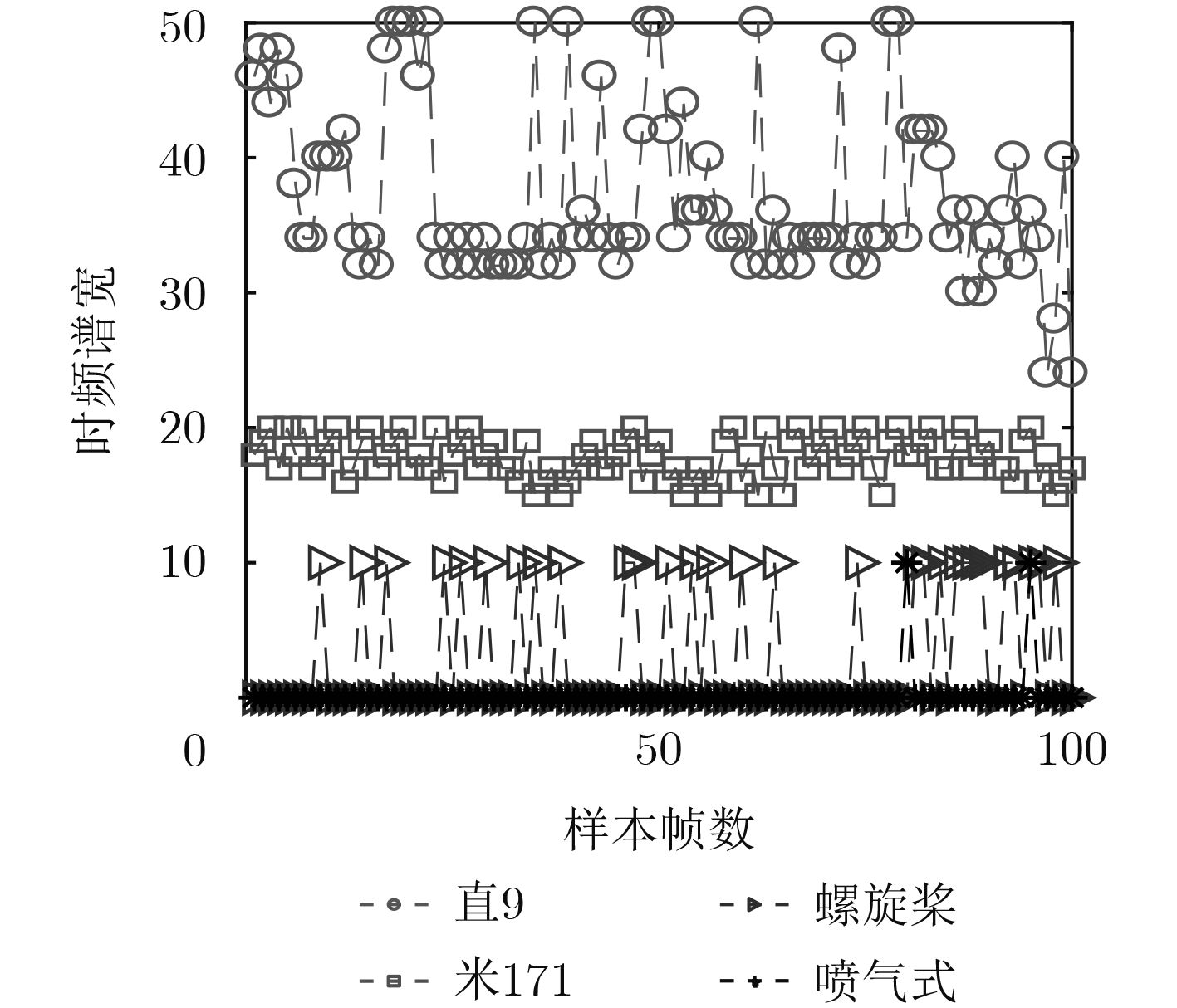
摘要: 该文在分析由常规窄带雷达获得的直升机、螺旋桨和喷气式飞机实测回波数据特征的基础上,提出一种基于多特征联合的分类识别算法。通过对大量实测回波数据的特征分析,提取多普勒频移、幅度相对量、时域和频域波形熵、时频特征多个具有明显区分性的特征,将其输入支撑向量机(SVM)分类器实现3类空中目标的分类。在分类的基础上,基于回波数据的时频谱宽和对称性特征,提出一种奇数与偶数片桨叶直升机识别方法。最后实测数据的处理结果验证了所提空中目标分类识别方法的有效性。Abstract: After analyzing the features of three measured data from the low-resolution radar system, corresponding to the helicopter, the propeller, and the turbojet, an algorithm is proposed by using multiple features to classify and recognize the aircraft targets. First, multiple features are extracted, including Doppler frequency shift, relative magnitude, waveform entropy of time and frequency domain, and time-frequency domain features from the measured data. Then, these features are utilized for classification purpose by means of the Support Vector Machine (SVM). Finally, owing to the symmetry and the width of time-frequency distributions of the returned signals between the helicopters with odd and even blades, a method is proposed to recognize of helicopter. The experimental results of measured data verify the effectivity of the proposed algorithms.
-
表 1 分类结果
特征选择 特征组合1 特征组合2 飞机类别 直升机 螺旋桨 喷气式 直升机 螺旋桨 喷气式 正确分类数 613 1090 525 648 1081 525 总数 637 1092 525 637 1092 525 正确识别率(%) 96.23 99.82 100.00 98.30 98.99 100.00  下载: 导出CSV
下载: 导出CSV
-
CHEN Victor C, LI Fayin, HO Shen-Shyang, et al. Micro-Doppler effect in radar phenomenon model and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systerm, 2006, 42(1): 2–21 doi: 10.1109/TAES.2006.1603402 CHEN Victor C, LI Fayin, HO Shen-Shyang, et al. Analysis of micro-Doppler signatures[J]. IEE Proceedings Radar,Sonars&Navigation, 2003, 150(4): 271–276 doi: 10.1049/ip-rsn.20030743 CHEN Kun, LI Yuehua, and XU Xingjian. Rotating targets classification based on micro-Doppler features using a modified adaptive boosting algorithm[C]. IEEE 2015 International Conference on Computers, Communications, and Systems, Kanyakumari, India, 2015: 236–240. YANG Yinan, LEI Jiajin, ZHANG Wenxue, et al. Targets classification and pattern recognition using micro-Doppler radar signatures[C]. IEEE Computer Society, Proceedings of the Seventh ACIS International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing, Las Vegas, USA, 2006: 213–217. DU Lan, LI Linsen, WANG Baoshuai, et al. Micro-Doppler feature extraction based on time-frequency spectrogram for ground moving targets classification with low-resolution radar[J]. IEEE Sensors Journal, 2016, 16(10): 3756–3763 doi: 10.1109/JSEN.2016.2538790 PAVLO M, KAREN E, JAAKKO A, et al. Classification of aircraft using micro-Doppler bicoherence-based features[J]. IEEE Transactions on Aerospace and Electronic System, 2014, 50(2): 1455–1467 doi: 10.1109/TAES.2014.120266 王福友, 罗钉, 刘宏伟. 低分辨机载雷达飞机目标分类识别技术研究[J]. 雷达学报, 2014, 3(4): 444–449 doi: 10.3724/SP.J.1300.2014.14075WANG Fuyou, LUO Ding, and LIU Hongwei. Low-resolution airborne radars aircraft target classification[J]. Journal of Radars, 2014, 3(4): 444–449 doi: 10.3724/SP.J.1300.2014.14075 杨守峰, 吴海坤, 王晓, 等. 低分辨雷达目标调制特征提取和分类识别方法[J]. 电子信息对抗技术, 2015, 30(4): 15–20 doi: 10.3969/j.issn.1674-2230.2015.03.004YANG Shoufeng, WU Haikun, WANG Xiao, et al. Target feature extraction and recognition based on low-resolution radar[J]. Eletronic Information Warfare Technology, 2015, 30(4): 15–20 doi: 10.3969/j.issn.1674-2230.2015.03.004 杜兰, 史蕙若, 李林森, 等. 基于分数阶傅里叶变换的窄带雷达飞机目标回波特征提取方法[J]. 电子与信息学报, 2016, 38(12): 3093–3099 doi: 10.11999/JEIT161035DU Lan, SHI Huiruo, LI Linsen, et al. Feature extraction method of narrow-band radar airplane signatures based on fractional fourier transform[J]. Journal of Electronics&Information Technology, 2016, 38(12): 3093–3099 doi: 10.11999/JEIT161035 赵越, 陈之纯, 纠博, 等. 一种基于时频分析的窄带雷达飞机目标分类特征提取方法[J]. 电子与信息学报, 2017, 39(9): 2225–2231 doi: 10.11999/JEIT161204ZHAO Yue, CHEN Zhichun, JIU Bo, et al. Narrowband aircraft targets feature extraction and classification based on time-frequency analysis[J]. Journal of Electronics&Information Technology, 2017, 39(9): 2225–2231 doi: 10.11999/JEIT161204 姜悦, 范菊平, 郭乐田, 等. 基于时频图的飞机目标特征提取算法[J]. 现代雷达, 2016, 38(4): 38–41 doi: 10.16592/j.cnki.1004-7859.2016.04.009JIANG Yue, FAN Juping, GUO Letian, et al. Feature-extraction algorithm of airplane targets based on time-frequency diagram[J]. Modern Radar, 2016, 38(4): 38–41 doi: 10.16592/j.cnki.1004-7859.2016.04.009 ZUO Lei, LI Ming, ZHANG Xiaowei, et al. Two helicopter classification methods with a high pulse repetition frequency radar[J]. IET Radar,Sonar&Navigation, 2013, 7(3): 312–320 doi: 10.1049/iet-rsn.2012.0278 ZHANG Hanhua, DAI Yongpeng, and ZHOU Zhimin. Helicopter classification using time-domain approach on X-band surveiliance radar[C]. IEEE International Geoscience and Remote Sensing, Beijing, China, 2016: 2288–2291. YONG Y W, HOON P J, WOO B J, et al. Automatic feature extraction from jet engine modulation signals based on an image processing method[J]. IET Radar,Sonar&Navigation, 2015, 9(7): 783–789 doi: 10.1049/iet-rsn.2014.0281 -



图(8) / 表(2)
计量
- 文章访问数: 2576
- HTML全文浏览量: 1298
- PDF下载量: 182
- 被引次数: 0
 下载:
下载:
