| Citation: | HOU Feifei, PENG Yinghao, DONG Jian, YIN Xue. Ground Penetrating Radar Hyperbolic Keypoint Detection and Object Localization Based on Dual YOLOv8-pose Model[J]. Journal of Electronics & Information Technology, 2024, 46(11): 4305-4316. doi: 10.11999/JEIT240242

|

| [1] |
LI Jing, LIU Cai, ZENG Zhaofa, et al. Gpr signal denoising and target extraction with the ceemd method[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(8): 1615–1619. doi: 10.1109/lgrs.2015.2415736.
|
| [2] |
李洪丽, 鹿琪. 探地雷达在LNAPL污染土壤探测中的应用进展研究[J]. 地球物理学进展, 2020, 35(3): 1141–1148. doi: 10.6038/pg2020DD0414.
LI Hongli and LU Qi. Progress in application of ground penetrating radar in LNAPL contaminated soil detection of LNAPL[J]. Progress in Geophysics, 2020, 35(3): 1141–1148. doi: 10.6038/pg2020DD0414.
|
| [3] |
尹德, 叶盛波, 张经纬, 等. 公路结构和介电特性对探地雷达反射回波的影响研究[J]. 电子测量技术, 2018, 41(5): 51–56. doi: 10.19651/j.cnki.emt.1700792.
YIN De, YE Shengbo, ZHANG Jingwei, et al. Study on the effect of highway structure and dielectric properties on GPR echo[J]. Electronic Measurement Technology, 2018, 41(5): 51–56. doi: 10.19651/j.cnki.emt.1700792.
|
| [4] |
王韵, 王红雨, 常留成, 等. 基于探地雷达的水库坝前淤积土沉积规律研究[J]. 水土保持学报, 2021, 35(4): 152–158. doi: 10.13870/j.cnki.stbcxb.2021.04.021.
WANG Yun, WANG Hongyu, CHANG Liucheng, et al. Study on sedimentation regulation of silted soil in the front of reservoir dam based on GPR[J]. Journal of Soil and Water Conservation, 2021, 35(4): 152–158. doi: 10.13870/j.cnki.stbcxb.2021.04.021.
|
| [5] |
覃谭, 赵永辉, 林国聪, 等. 探地雷达在上林湖越窑遗址水下考古中的应用[J]. 物探与化探, 2018, 42(3): 624–630. doi: 10.11720/wtyht.2018.1290.
QIN Tan, ZHAO Yonghui, LIN Guocong, et al. The application of GPR to underwater archaeological investigation of Shanglinhu Yue kiln relics[J]. Geophysical and Geochemical Exploration, 2018, 42(3): 624–630. doi: 10.11720/wtyht.2018.1290.
|
| [6] |
胡进峰, 周正欧. 浅地层探地雷达目标探测和定位新方法[J]. 仪器仪表学报, 2006, 27(4): 371–375. doi: 10.3321/j.issn:0254-3087.2006.04.010.
HU Jinfeng and ZHOU Zhengou. Target detection and orientation in sub-surface penetrating radar data[J]. Chinese Journal of Scientific Instrument, 2006, 27(4): 371–375. doi: 10.3321/j.issn:0254-3087.2006.04.010.
|
| [7] |
LIU Yayu, WANG Meiqing, and CAI Qiurong. The target detection for GPR images based on curve fitting[C]. The 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 2010: 2876–2879. doi: 10.1109/CISP.2010.5646818.
|
| [8] |
LI Wentao, CUI Xihong, GUO Li, et al. Tree root automatic recognition in ground penetrating radar profiles based on randomized hough transform[J]. Remote Sensing, 2016, 8(5): 430. doi: 10.3390/rs8050430.
|
| [9] |
MAAS C and SCHMALZL J. Using pattern recognition to automatically localize reflection hyperbolas in data from ground penetrating radar[J]. Computers & Geosciences, 2013, 58: 116–125. doi: 10.1016/j.cageo.2013.04.012.
|
| [10] |
DOU Qingxu, WEI Lijun, MAGEE D R, et al. Real-time hyperbola recognition and fitting in GPR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(1): 51–62. doi: 10.1109/tgrs.2016.2592679.
|
| [11] |
PATSIA O, GIANNOPOULOS A, and GIANNAKIS I. Background removal, velocity estimation, and reverse-time migration: A complete GPR processing pipeline based on machine learning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 2003311. doi: 10.1109/tgrs.2023.3300276.
|
| [12] |
ZHANG Xiaowei, XUE Fangxiu, WANG Zepeng, et al. A novel method of hyperbola recognition in ground penetrating radar (GPR) B-scan image for tree roots detection[J]. Forests, 2021, 12(8): 1019. doi: 10.3390/f12081019.
|
| [13] |
LIU Bin, ZHANG Jiaqi, LEI Ming, et al. Simultaneous tunnel defects and lining thickness identification based on multi-tasks deep neural network from ground penetrating radar images[J]. Automation in Construction, 2023, 145: 104633. doi: 10.1016/j.autcon.2022.104633.
|
| [14] |
XIANG Deliang, PAN Xiaoyu, DING Huaiyue, et al. Two-stage registration of SAR images with large distortion based on superpixel segmentation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5211115. doi: 10.1109/tgrs.2024.3392971.
|
| [15] |
倪志康, 叶盛波, 史城, 等. 一种深度学习辅助的探地雷达定位方法[J]. 电子与信息学报, 2022, 44(4): 1265–1273. doi: 10.11999/JEIT211072.
NI Zhikang, YE Shengbo, SHI Cheng, et al. A deep learning assisted ground penetrating radar localization method[J]. Journal of Electronics & Information Technology, 2022, 44(4): 1265–1273. doi: 10.11999/JEIT211072.
|
| [16] |
PHAM M T and LEFÈVRE S. Buried object detection from B-scan ground penetrating radar data using faster-RCNN[C]. IGARSS 2018 - 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018: 6804–6807. doi: 10.1109/IGARSS.2018.8517683.
|
| [17] |
REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137–1149. doi: 10.1109/tpami.2016.2577031.
|
| [18] |
CUI Fan, NING Muwei, SHEN Jiawei, et al. Automatic recognition and tracking of highway layer-interface using faster R-CNN[J]. Journal of Applied Geophysics, 2022, 196: 104477. doi: 10.1016/j.jappgeo.2021.104477.
|
| [19] |
来鹏飞, 李伟, 高尧, 等. 基于改进Cascade R-CNN的探地雷达管线目标检测[J]. 计算机系统应用, 2023, 32(2): 102–110. doi: 10.15888/j.cnki.csa.008945.
LAI Pengfei, LI Wei, GAO Yao, et al. GPR pipeline target detection based on improved Cascade R-CNN[J]. Computer Systems & Applications, 2023, 32(2): 102–110. doi: 10.15888/j.cnki.csa.008945.
|
| [20] |
ZHAO Shuai, SHADABFAR M, ZHANG Dongming, et al. Deep learning-based classification and instance segmentation of leakage-area and scaling images of shield tunnel linings[J]. Structural Control and Health Monitoring, 2021, 28(6): e2732. doi: 10.1002/stc.2732.
|
| [21] |
HOU Feifei, LEI Wentai, LI Shuai, et al. Deep learning-based subsurface target detection from GPR scans[J]. IEEE Sensors Journal, 2021, 21(6): 8161–8171. doi: 10.1109/jsen.2021.3050262.
|
| [22] |
HUANG Jian, YANG Xi, ZHOU Feng, et al. A deep learning framework based on improved self-supervised learning for ground-penetrating radar tunnel lining inspection[J]. Computer-Aided Civil and Infrastructure Engineering, 2024, 39(6): 814–833. doi: 10.1111/mice.13042.
|
| [23] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, USA, 2016: 779–788. doi: 10.1109/CVPR.2016.91.
|
| [24] |
LIU Hai, LIN Chunxu, CUI Jie, et al. Detection and localization of rebar in concrete by deep learning using ground penetrating radar[J]. Automation in Construction, 2020, 118: 103279. doi: 10.1016/j.autcon.2020.103279.
|
| [25] |
孙学超, 张其道, 尹达, 等. 基于YOLOv5s的探地雷达图像目标检测研究[J]. 交通世界, 2023(7): 3–6. doi: 10.16248/j.cnki.11-3723/u.2023.07.036.
SUN Xuechao, ZHANG Qidao, YIN Da, et al. Research on ground penetrating radar image target detection based on YOLOv5s[J]. World of Transportation, 2023(7): 3–6. doi: 10.16248/j.cnki.11-3723/u.2023.07.036.
|
| [26] |
WANG Zhen, LAN Tian, QU Xiaodong, et al. Improved SSD framework for automatic subsurface object indentification for gpr data processing[C]. The 2021 CIE International Conference on Radar (Radar), Haikou, China, 2021: 2078–2081. doi: 10.1109/Radar53847.2021.10028347.
|
| [27] |
覃紫馨, 姜彦南, 徐立, 等. 基于YOLO算法的探地雷达道路图像异常自动检测[J]. 科学技术与工程, 2023, 23(27): 11505–11512. doi: 10.3969/j.issn.1671-1815.2023.27.004.
QIN Zixin, JIANG Yannan, XU Li, et al. Automatic detection of anomalies in GPR images based on YOLO algorithm[J]. Science Technology and Engineering, 2023, 23(27): 11505–11512. doi: 10.3969/j.issn.1671-1815.2023.27.004.
|
| [28] |
QIU Zhi, ZHAO Zuoxi, CHEN Shaoji, et al. Application of an improved YOLOv5 algorithm in real-time detection of foreign objects by ground penetrating radar[J]. Remote Sensing, 2022, 14(8): 1895. doi: 10.3390/rs14081895.
|
| [29] |
HU Haobang, FANG Hongyuan, WANG Niannian, et al. Defects identification and location of underground space for ground penetrating radar based on deep learning[J]. Tunnelling and Underground Space Technology, 2023, 140: 105278. doi: 10.1016/j.tust.2023.105278.
|
| [30] |
胡荣明, 李鑫, 竞霞, 等. YOLOv7在探地雷达B-Scan图像解译中的应用[J]. 测绘通报, 2023(8): 29–33. doi: 10.13474/j.cnki.11-2246.2023.0227.
HU Rongming, LI Xin, JING Xia, et al. Application of YOLOv7 in GPR B-Scan image interpretation[J]. Bulletin of Surveying and Mapping, 2023(8): 29–33. doi: 10.13474/j.cnki.11-2246.2023.0227.
|
| [31] |
WANG Niannian, ZHANG Zexi, HU Haobang, et al. Underground defects detection based on GPR by fusing simple linear iterative clustering phash (SLIC-Phash) and convolutional block attention module (CBAM)-YOLOv8[J]. IEEE Access, 2024, 12: 25888–25905. doi: 10.1109/access.2024.3365959.
|
| [32] |
LI Shupeng, CUI Xihong, GUO Li, et al. Enhanced automatic root recognition and localization in GPR images through a YOLOv4-based deep learning approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5114314. doi: 10.1109/tgrs.2022.3181202.
|
| [33] |
方涛涛, 王池社, 王洁, 等. 基于YOLO v8n的探地雷达图像管线定位方法[J]. 国外电子测量技术, 2023, 42(11): 170–177. doi: 10.19652/j.cnki.femt.2305179.
FANG Taotao, WANG Chishe, WANG Jie, et al. Ground penetrating radar image pipeline location based on YOLO v8n[J]. Foreign Electronic Measurement Technology, 2023, 42(11): 170–177. doi: 10.19652/j.cnki.femt.2305179.
|
| [34] |
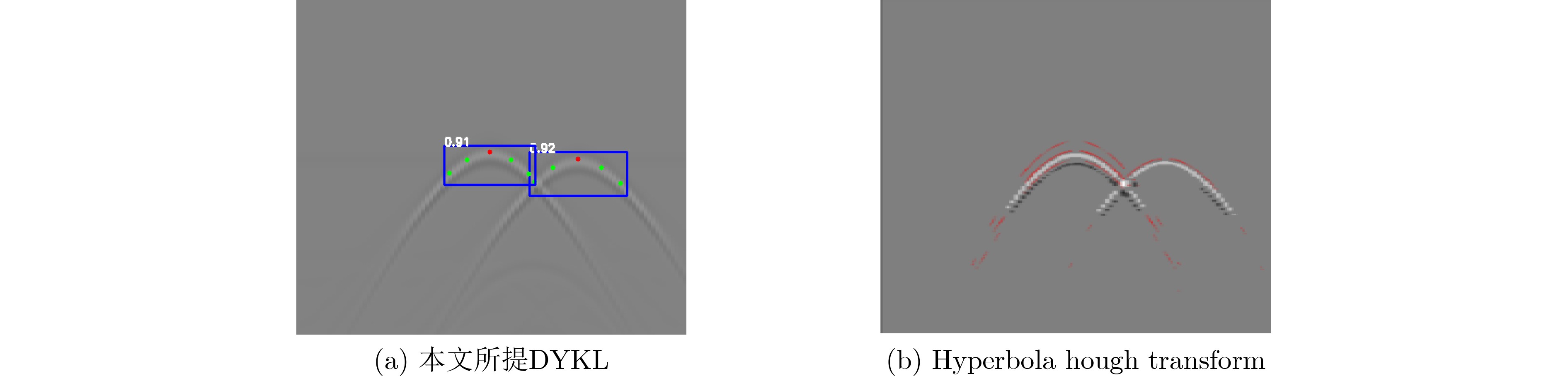
兰天, 赵毅, 陈宏畅, 等. 基于拟合误差消除的探地雷达图像鲁棒双曲线识别模型[J]. 信号处理, 2023, 39(9): 1699–1710. doi: 10.16798/j.issn.1003-0530.2023.09.014.
LAN Tian, ZHAO Yi, CHEN Hongchang, et al. A robust hyperbola recognition model with fitting-errors-based eliminating in GPR B-scan image[J]. Journal of Signal Processing, 2023, 39(9): 1699–1710. doi: 10.16798/j.issn.1003-0530.2023.09.014.
|
| [35] |
WANG C Y, BOCHKOVSKIY A, and LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]. 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, Canada, 2023: 7464–7475. doi: 10.1109/CVPR52729.2023.00721.
|
| [36] |
ZHOU Chuande, LU Zhenyu, LV Zhongliang, et al. Metal surface defect detection based on improved YOLOv5[J]. Scientific Reports, 2023, 13(1): 20803. doi: 10.1038/s41598-023-47716-2.
|
| [37] |
窦智, 高浩然, 刘国奇, 等. 轻量化YOLOv8的小样本钢板缺陷检测算法[J]. 计算机工程与应用, 2024, 60(9): 90–100. doi: 10.3778/j.issn.1002-8331.2311-0070.
DOU Zhi, GAO Haoran, LIU Guoqi, et al. Small sample steel plate defect detection algorithm of lightweight YOLOv8[J]. Computer Engineering and Applications, 2024, 60(9): 90–100. doi: 10.3778/j.issn.1002-8331.2311-0070.
|
| [38] |
XIONG Hongqiang, LI Jing, LI Zhilian, et al. GPR-GAN: A ground-penetrating radar data generative adversarial network[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5200114. doi: 10.1109/TGRS.2023.3337172.
|
| [39] |
RUSSELL B C, TORRALBA A, MURPHY K P, et al. LabelMe: A database and web-based tool for image annotation[J]. International Journal of Computer Vision, 2008, 77(1-3): 157–173. doi: 10.1007/s11263-007-0090-8.
|
| [40] |
CAI Zhaowei and VASCONCELOS N. Cascade R-CNN: High quality object detection and instance segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(5): 1483–1498. doi: 10.1109/tpami.2019.2956516.
|
| [41] |
LYU Chengqi, ZHANG Wenwei, HUANG Haian, et al. RTMDet: An empirical study of designing real-time object detectors[J]. arXiv preprint arXiv: 2212.07784, 2022. doi: 10.48550/arXiv.2212.07784.
|
| [42] |
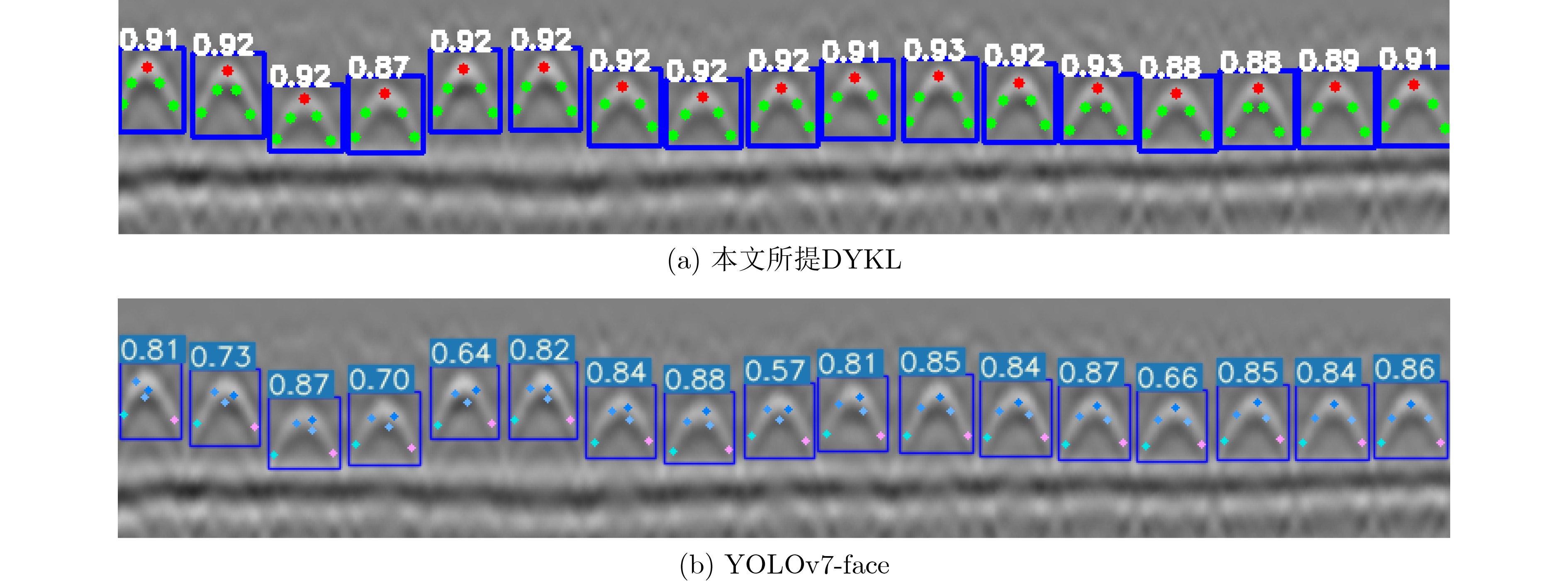
BOUSMAHA R, LAOUEDJ S, AGGOUNE L, et al. YOLOv7-face: A real-time face detector[C]. The 2023 International Conference on Networking and Advanced Systems (ICNAS), Algiers, Algeria, 2023: 1–6. doi: 10.1109/ICNAS59892.2023.10330470.
|
Figures(9) / Tables(3)



 DownLoad:
DownLoad: