| Citation: | ZHANG Zhen, JIANG Tiansheng, ZHAO Lijun, CHENG Ze. Camera Calibration Using Cross-Section Waterline Orientation for Video-based Flow Measurement[J]. Journal of Electronics & Information Technology, 2024, 46(4): 1428-1437. doi: 10.11999/JEIT230573

|

| [1] |
LE COZ J, HAUET A, PIERREFEU G, et al. Performance of Image-based Velocimetry (LSPIV) applied to flash-flood discharge measurements in mediterranean rivers[J]. Journal of Hydrology, 2010, 394(1/2): 42–52. doi: 10.1016/j.jhydrol.2010.05.049.
|
| [2] |
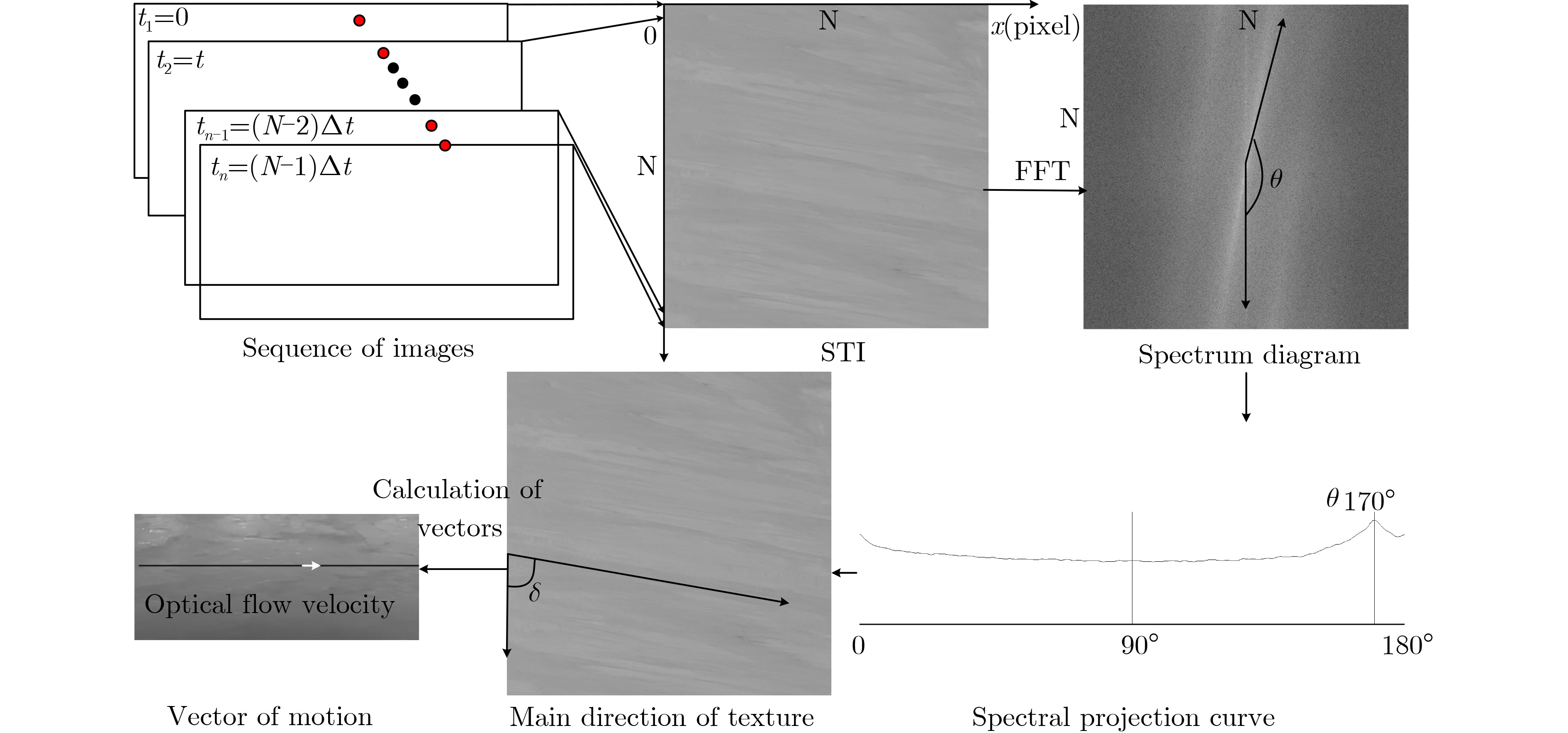
FUJITA I, WATANABE H, and TSUBAKI R. Development of a non-intrusive and efficient flow monitoring technique: The Space-Time Image Velocimetry (STIV)[J]. International Journal of River Basin Management, 2007, 5(2): 105–114. doi: 10.1080/15715124.2007.9635310.
|
| [3] |
TAURO F, TOSI F, MATTOCCIA S, et al. Optical Tracking Velocimetry (OTV): Leveraging optical flow and trajectory-based filtering for surface streamflow observations[J]. Remote Sensing, 2018, 10(12): 2010. doi: 10.3390/rs10122010.
|
| [4] |
张振, 徐枫, 王鑫, 等. 河流水面成像测速研究进展[J]. 仪器仪表学报, 2015, 36(7): 1441–1450. doi: 10.19650/j.cnki.cjsi.2015.07.001.
ZHANG Zhen, XU Feng, WANG Xin, et al. Research progress on river surface imaging velocimetry[J]. Chinese Journal of Scientific Instrument, 2015, 36(7): 1441–1450. doi: 10.19650/j.cnki.cjsi.2015.07.001.
|
| [5] |
蒋海军. 大视场条件下的摄像机标定方法研究[D]. [硕士论文], 国防科技大学, 2017. doi: 10.27052/d.cnki.gzjgu.2017.000625.
JIANG Haijun. Research on camera calibration method in large field of view[D]. [Master dissertation], National University of Defense Technology, 2017. doi: 10.27052/d.cnki.gzjgu.2017.000625.
|
| [6] |
张振, 徐枫, 沈洁, 等. 基于变高单应的单目视觉平面测量方法[J]. 仪器仪表学报, 2014, 35(8): 1860–1868. doi: 10.19650/j.cnki.cjsi.2014.08.025.
ZHANG Zhen, XU Feng, SHEN Jie, et al. Plane measurement method with monocular vision based on variable-height homography[J]. Chinese Journal of Scientific Instrument, 2014, 35(8): 1860–1868. doi: 10.19650/j.cnki.cjsi.2014.08.025.
|
| [7] |
杨聃, 邵广俊, 胡伟飞, 等. 基于图像的河流表面测速研究综述[J]. 浙江大学学报:工学版, 2021, 55(9): 1752–1763. doi: 10.3785/j.issn.1008-973X.2021.09.017.
YANG Dan, SHAO Guangjun, HU Weifei, et al. Review of image-based river surface velocimetry research[J]. Journal of Zhejiang University:Engineering Science, 2021, 55(9): 1752–1763. doi: 10.3785/j.issn.1008-973X.2021.09.017.
|
| [8] |
AL-MAMARI M M, KANTOUSH S A, KOBAYASHI S, et al. Real-time measurement of flash-flood in a Wadi area by LSPIV and STIV[J]. Hydrology, 2019, 6(1): 27. doi: 10.3390/hydrology6010027.
|
| [9] |
曹列凯, DETERT M, 李丹勋. 基于无人机的长河段表面流场测量系统与应用[J]. 清华大学学报:自然科学版, 2022, 62(12): 1922–1929. doi: 10.16511/j.cnki.qhdxxb.2022.21.012.
CAO Liekai, DETERT M, and LI Danxun. Airborne image velocimetry system and its application to measure the surface flow fields of long river reaches[J]. Journal of Tsinghua University:Science and Technology, 2022, 62(12): 1922–1929. doi: 10.16511/j.cnki.qhdxxb.2022.21.012.
|
| [10] |
TSAI R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J]. IEEE Journal on Robotics and Automation, 1987, 3(4): 323–344. doi: 10.1109/JRA.1987.1087109.
|
| [11] |
HOLLAND K T, HOLMAN R A, LIPPMANN T C, et al. Practical use of video imagery in nearshore oceanographic field studies[J]. IEEE Journal of Oceanic Engineering, 1997, 22(1): 81–92. doi: 10.1109/48.557542.
|
| [12] |
BECHLE A J, WU C H, LIU Wencheng, et al. Development and application of an automated river-estuary discharge imaging system[J]. Journal of Hydraulic Engineering, 2012, 138(4): 327–339. doi: 10.1061/(ASCE)HY.1943-7900.0000521.
|
| [13] |
HUANG Weiche, YOUNG C C, and LIU Wencheng. Application of an automated discharge imaging system and LSPIV during typhoon events in Taiwan[J]. Water, 2018, 10(3): 280. doi: 10.20944/preprints201802.0089.v1.
|
| [14] |
COSTA F A L and MITISHITA E A. An approach to improve direct sensor orientation using the integration of photogrammetric and lidar datasets[J]. International Journal of Remote Sensing, 2019, 40(14): 5651–5672. doi: 10.1080/01431161.2019.1580794.
|
| [15] |
ZHANG Zhen, ZHAO Lijun, LIU Boyuan, et al. Free-surface velocity measurement using direct sensor orientation-based STIV[J]. Micromachines, 2022, 13(8): 1167. doi: 10.3390/mi13081167.
|
| [16] |
LIU Wencheng and HUANG Weiche. Development of a three-axis accelerometer and Large-Scale Particle Image Velocimetry (LSPIV) to enhance surface velocity measurements in rivers[J]. Computers & Geosciences, 2021, 155: 104866. doi: 10.1016/j.cageo.2021.104866.
|
| [17] |
张振, 吕莉, 石爱业, 等. 基于物像尺度变换的河流水面流场定标方法[J]. 仪器仪表学报, 2017, 38(9): 2273–2281. doi: 10.19650/j.cnki.cjsi.2017.09.023.
ZHANG Zhen, LV Li, SHI Aiye, et al. River surface flow field calibration method based on object-image scaling[J]. Chinese Journal of Scientific Instrument, 2017, 38(9): 2273–2281. doi: 10.19650/j.cnki.cjsi.2017.09.023.
|
| [18] |
TSUBAKI R. On the texture angle detection used in Space-Time Image Velocimetry (STIV)[J]. Water Resources Research, 2017, 53(12): 10908–10914. doi: 10.1002/2017WR021913.
|
| [19] |
FUJITA I, KOSAKA Y, and YOROZUYA A. Tracking of river surface features by space time imageing[C]. The 15th International Symposium on Flow Visualization, Minsk, Belarus, 2012: 25–28.
|
| [20] |
ZHANG Zhen, ZHOU Yang, LIU Haiyun, et al. Visual measurement of water level under complex illumination conditions[J]. Sensors, 2019, 19(19): 4141. doi: 10.3390/s19194141.
|
| [21] |
王慧斌, 董伟, 张振, 等. 基于时空图像频谱的时均流场重建方法[J]. 仪器仪表学报, 2015, 36(3): 623–631. doi: 10.19650/j.cnki.cjsi.2015.03.018.
WANG Huibin, DONG Wei, ZHANG Zhen, et al. Time-averaged flow field reconstruction method based on spectrum of spatio-temporal image[J]. Chinese Journal of Scientific Instrument, 2015, 36(3): 623–631. doi: 10.19650/j.cnki.cjsi.2015.03.018.
|
| [22] |
ZHANG Zhengyou. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330–1334. doi: 10.1109/34.888718.
|
| [23] |
FUJITA I, NOTOYA Y, TANI K, et al. Efficient and accurate estimation of water surface velocity in STIV[J]. Environmental Fluid Mechanics, 2019, 19(5): 1363–1378. doi: 10.1007/s10652-018-9651-3.
|
| [24] |
赵浩源, 陈华, 刘维高, 等. 基于河流表面时空图像识别的测流方法[J]. 水资源研究, 2020, 9(1): 1–11. doi: 10.12677/JWRR.2020.91001.
ZHAO Haoyuan, CHEN Hua, LIU Weigao, et al. Application of flow measurement method based on space-time image recognition of river surface[J]. Journal of Water Resources Research, 2020, 9(1): 1–11. doi: 10.12677/JWRR.2020.91001.
|

Figures(13) / Tables(3)



 DownLoad:
DownLoad: