| Citation: | NIE Wei, WEN Huaizhi, XIE Liangbo, YANG Xiaolong, ZHOU Mu. Indoor Localization of UAV Using Monocular Vision[J]. Journal of Electronics & Information Technology, 2022, 44(3): 906-914. doi: 10.11999/JEIT211328

|

| [1] |
FAN Bangkui, LI Yun, ZHANG Ruiyu, et al. Review on the technological development and application of UAV systems[J]. Chinese Journal of Electronics, 2020, 29(2): 199–207. doi: 10.1049/cje.2019.12.006
|
| [2] |
陈友鹏, 李雷, 赖刘生, 等. 多旋翼无人机的特点及应用[J]. 时代汽车, 2021(16): 20–21. doi: 10.3969/j.issn.1672-9668.2021.16.010
CHEN Youpeng, LI Lei, LAI Liusheng, et al. Features and applications of multi-rotor UAV[J]. Auto Time, 2021(16): 20–21. doi: 10.3969/j.issn.1672-9668.2021.16.010
|
| [3] |
NEMRA A and AOUF N. Robust INS/GPS sensor fusion for UAV localization using SDRE nonlinear filtering[J]. IEEE Sensors Journal, 2010, 10(4): 789–798. doi: 10.1109/JSEN.2009.2034730
|
| [4] |
ZAFARI F, GKELIAS A, and LEUNG K K. A survey of indoor localization systems and technologies[J]. IEEE Communications Surveys & Tutorials, 2019, 21(3): 2568–2599. doi: 10.1109/COMST.2019.2911558
|
| [5] |
赵帅杰. 基于WiFi/蓝牙融合的室内定位算法研究[D]. [硕士论文], 桂林电子科技大学, 2020.
ZHAO Shuaijie. Research on indoor location algorithm based on WiFi and Bluetooth fusion[D]. [Master dissertation], Guilin University of Electronic Technology, 2020.
|
| [6] |
TAKETOMI T, UCHIYAMA H, and IKEDA S. Visual SLAM algorithms: A survey from 2010 to 2016[J]. IPSJ Transactions on Computer Vision and Applications, 2017, 9(1): 16. doi: 10.1186/s41074-017-0027-2
|
| [7] |
SILVEIRA G, MALIS E, and RIVES P. An efficient direct approach to visual SLAM[J]. IEEE Transactions on Robotics, 2008, 24(5): 969–979. doi: 10.1109/TRO.2008.2004829
|
| [8] |
DAVISON A J, REID I D, MOLTON N D, et al. MonoSLAM: Real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052–1067. doi: 10.1109/TPAMI.2007.1049
|
| [9] |
KLEIN G and MURRAY D. Parallel tracking and mapping for small AR workspaces[C]. Proceedings of the 6th IEEE And ACM International Symposium on Mixed and Augmented Reality, Nara, Japan, 2007: 225–234.
|
| [10] |
MUR-ARTAL R, MONTIEL J M M, and TARDÓS J D. ORB-SLAM: A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147–1163. doi: 10.1109/TRO.2015.2463671
|
| [11] |
ENGEL J, SCHÖPS T, and CREMERS D. LSD-SLAM: Large-scale direct monocular SLAM[C]. Proceedings of the 13th European Conference on Computer Vision, Zurich, Switzerland, 2014: 834–849.
|
| [12] |
FORSTER C, ZHANG Zichao, GASSNER M, et al. SVO: Semidirect visual odometry for monocular and multicamera systems[J]. IEEE Transactions on Robotics, 2017, 33(2): 249–265. doi: 10.1109/TRO.2016.2623335
|
| [13] |
BAKER S and MATTHEWS I. Lucas-kanade 20 years on: A unifying framework[J]. International Journal of Computer Vision, 2004, 56(3): 221–255. doi: 10.1023/B:VISI.0000011205.11775.fd
|
| [14] |
TRIGGS B, MCLAUCHLAN P F, HARTLEY R I, et al. Bundle adjustment—a modern synthesis[C]. Proceedings of the International Workshop on Vision Algorithms, Corfu, Greece, 1999: 298–372.
|
| [15] |
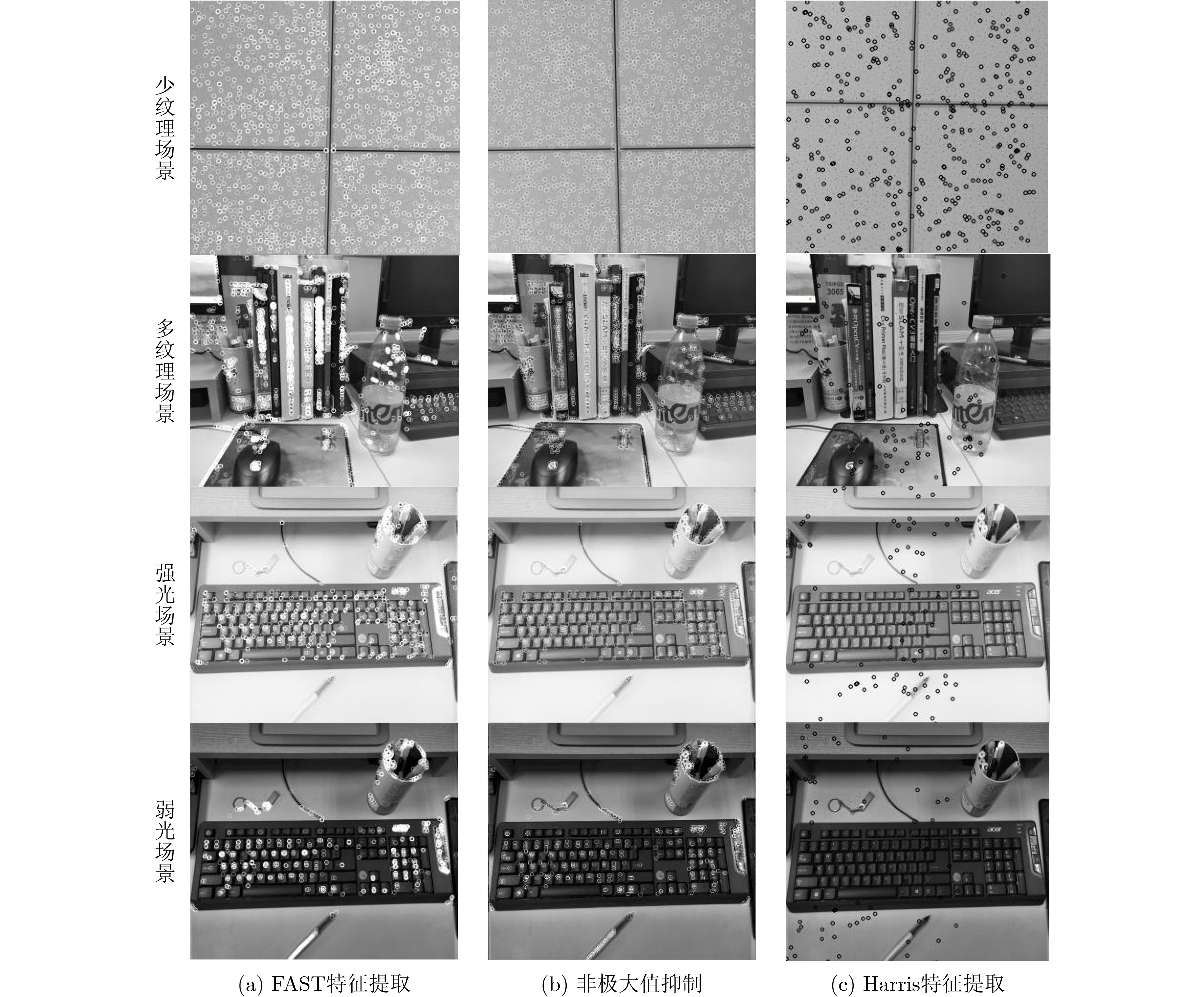
VISWANATHAN D G. Features from accelerated segment test (FAST)[C]. Proceedings of the 10th workshop on Image Analysis for Multimedia Interactive Services, London, UK, 2009: 6–8.
|
| [16] |
DOLLÁR P, APPEL R, BELONGIE S, et al. Fast feature pyramids for object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(8): 1532–1545. doi: 10.1109/TPAMI.2014.2300479
|
| [17] |
CHIU L C, CHANG T S, CHEN J Y, et al. Fast SIFT design for real-time visual feature extraction[J]. IEEE Transactions on Image Processing, 2013, 22(8): 3158–3167. doi: 10.1109/TIP.2013.2259841
|
| [18] |
MISTRY S and PATEL A. Image stitching using Harris feature detection[J]. International Research Journal of Engineering and Technology (IRJET)
|
| [19] |
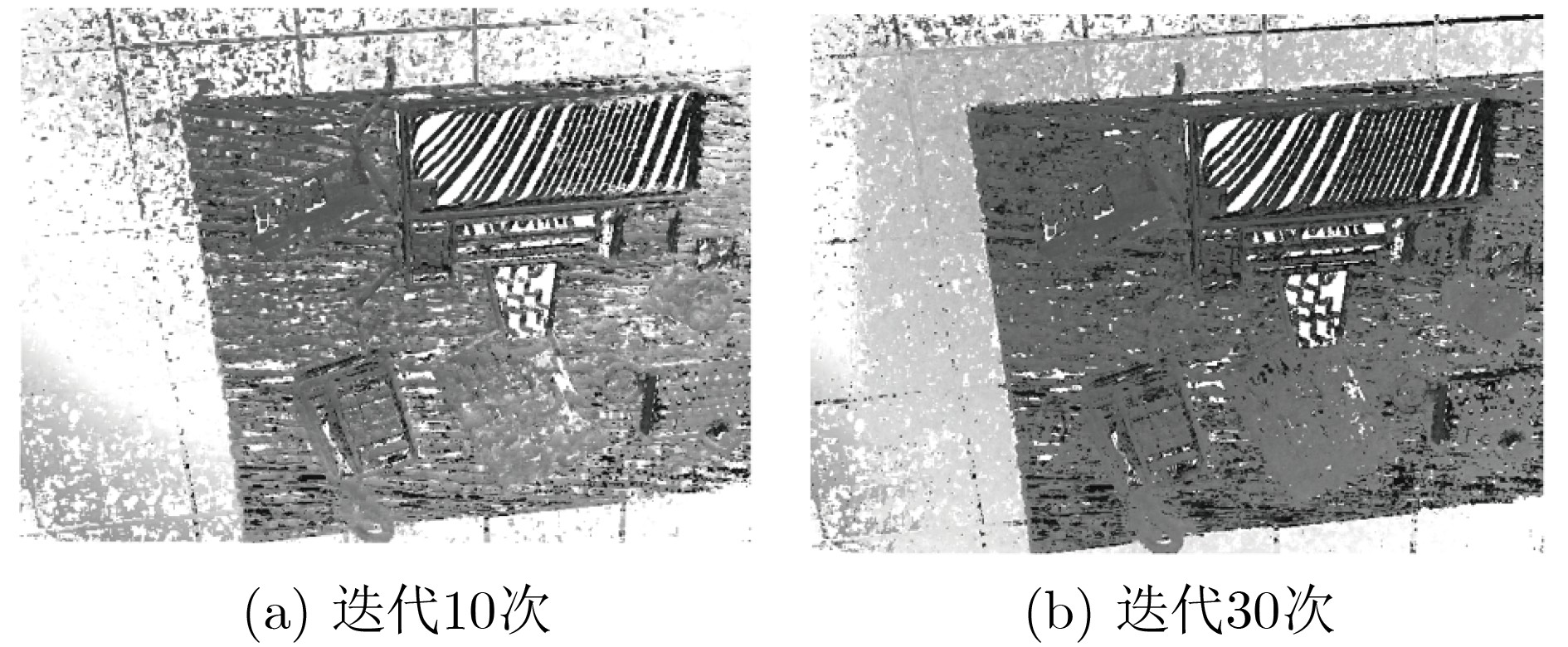
PIZZOLI M, FORSTER C, and SCARAMUZZA D. REMODE: Probabilistic, monocular dense reconstruction in real time[C]. Proceedings of 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014: 2609–2616.
|
Figures(12) / Tables(2)



 DownLoad:
DownLoad: