| Citation: | Bo JIA, Xiaoxin FENG, Jun LI, Biting YU, Qian ZHAO, Qi WU. Pilot Iris Recognition Based on Spherical Haar Wavelet and Convolutional Neural Network[J]. Journal of Electronics & Information Technology, 2021, 43(4): 939-947. doi: 10.11999/JEIT190928

|

|
MA Li, WANG Yunhong, and TAN Tieniu. Iris recognition based on multichannel Gabor filtering[C]. The 5th Asian Conference on Computer Vision, Melbourne, Australia, 2002: 279–283.
|
|
YAO Peng, LI Jun, YE Xueyi, et al. Iris recognition algorithm using modified log-Gabor filters[C]. The 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 2006: 461–464.
|
|
NABTI M and BOURIDANE A. An effective and fast iris recognition system based on a combined multiscale feature extraction technique[J]. Pattern Recognition, 2008, 41(3): 868–879. doi: 10.1016/j.patcog.2007.06.030
|
|
PROENÇA H and SANTOS G. Fusing color and shape descriptors in the recognition of degraded iris images acquired at visible wavelengths[J]. Computer Vision and Image Understanding, 2012, 116(2): 167–178. doi: 10.1016/j.cviu.2011.10.008
|
|
SANTOS G and HOYLE E. A fusion approach to unconstrained iris recognition[J]. Pattern Recognition Letters, 2012, 33(8): 984–990. doi: 10.1016/j.patrec.2011.08.017
|
|
TAN Tieniu, ZHANG Xiaobo, SUN Zhenan, et al. Noisy iris image matching by using multiple cues[J]. Pattern Recognition Letters, 2012, 33(8): 970–977. doi: 10.1016/j.patrec.2011.08.009
|
|
HUO Guang, LIU Yuanning, ZHU Xiaodong, et al. Secondary iris recognition method based on local energy-orientation feature[J]. Journal of Electronic Imaging, 2015, 24(1): 013033. doi: 10.1117/1.JEI.24.1.013033
|
|
KUMAR A, POTNIS A, and SINGH A. Iris recognition and feature extraction in iris recognition system by employing 2D DCT[J]. IRJET International Research Journal of Engineering and Technology, 2016, 3(12): 503–510.
|
|
刘元宁, 刘帅, 朱晓冬, 等. 基于特征加权融合的虹膜识别算法[J]. 吉林大学学报: 工学版, 2019, 49(1): 221–229.
LIU Yuanning, LIU Shuai, ZHU Xiaodong, et al. Iris recognition algorithm based on feature weighted fusion[J]. Journal of Jilin University:Engineering and Technology Edition, 2019, 49(1): 221–229.
|
|
OUYANG Wanli, ZHAO Tianle, CHAM W K, et al. Fast full-search-equivalent pattern matching using asymmetric haar wavelet packets[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2016, 28(4): 819–833. doi: 10.1109/tcsvt.2016.2629621
|
|
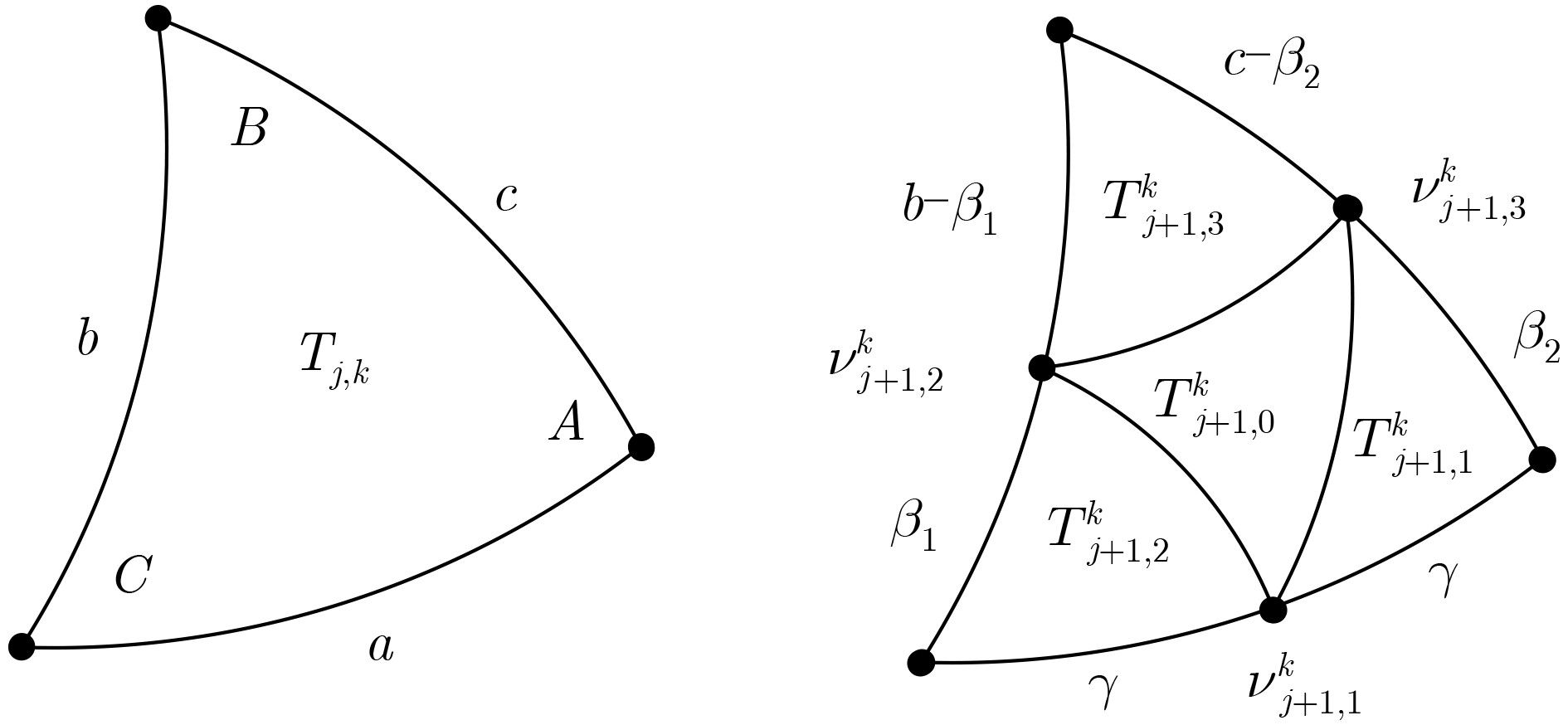
WU E Q, ZHOU Guirong, ZHU Limin, et al. Rotated sphere haar wavelet and deep contractive auto-encoder network with fuzzy Gaussian SVM for pilot’s pupil center detection[J]. IEEE Transactions on Cybernetics, 2019, 51(1): 332–345. doi: 10.1109/TCYB.2018.2886012
|
|
XU Guangzhu, ZHANG Zaifeng, and MA Yide. A novel method for iris feature extraction based on intersecting cortical model network[J]. Journal of Applied Mathematics and Computing, 2018, 26(1/2): 341–352.
|
|
ALOYSIUS N and GEETHA M. A review on deep convolutional neural networks[C]. 2017 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 2017: 588–592.
|
|
DHAGE S S, HEGDE S S, MANIKANTAN K, et al. DWT-based feature extraction and radon transform based contrast enhancement for improved iris recognition[J]. Procedia Computer Science, 2015, 45: 256–265. doi: 10.1016/j.procs.2015.03.135
|
|
BHARATH B V, VILAS A S, MANIKANTAN K, et al. Iris recognition using radon transform thresholding based feature extraction with Gradient-based Isolation as a pre-processing technique[C]. The 9th International Conference on Industrial and Information Systems (ICIIS), Gwalior, India, 2014: 1–8.
|
|
MINAEE S, ABDOLRASHIDI A. Deepiris: Iris recognition using a deep learning approach[J]. arXiv preprint arXiv: 1907.09380, 2019.
|
|
CHEN Ying, WANG Wenyuan, ZENG Zhuang, et al. Adapted deep convnets technology for robust iris recognition[J]. Journal of Electronic Imaging, 2019, 28(3): 033008.
|
Figures(8) / Tables(2)



 DownLoad:
DownLoad: