| Citation: | Wei XIONG, Xiangqi GU, Congan XU, Yaqi CUI. Tracking Method without Prior Information when Multi-group Targets Appear Successively[J]. Journal of Electronics & Information Technology, 2020, 42(7): 1619-1626. doi: 10.11999/JEIT190508

|
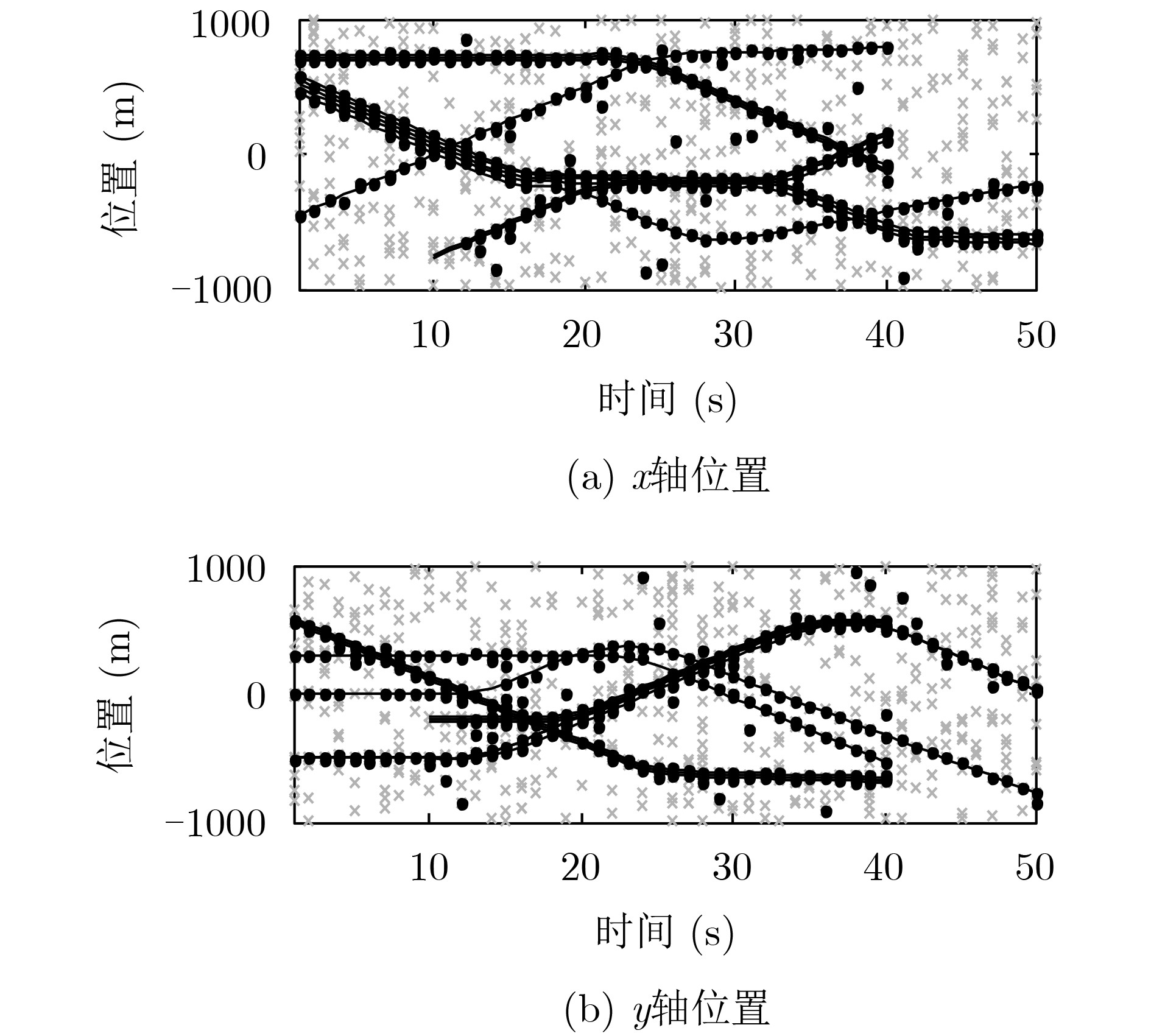
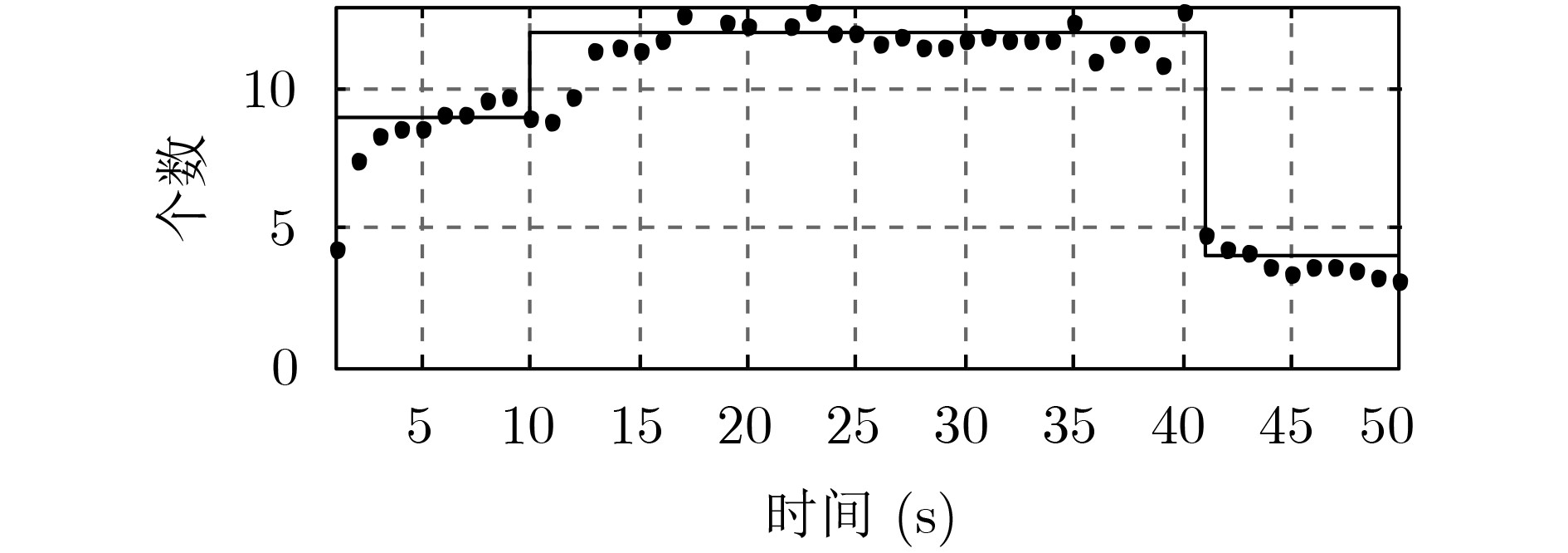
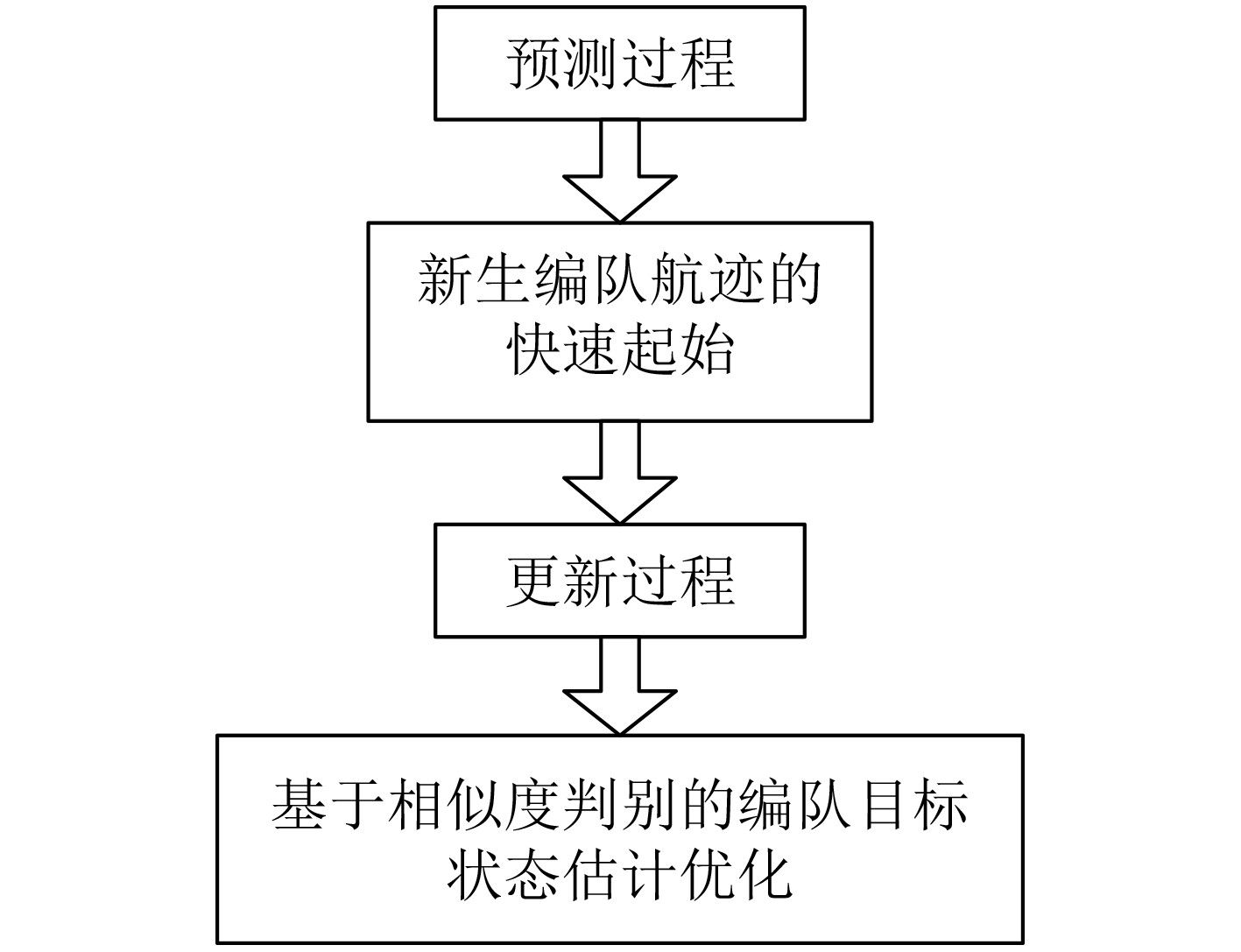
Considering the problem of multi-group maneuvering target tracking, a fast tracking method based on Interactive Multiple Maneuvering Gaussian Mixture Probability Hypothesis Density (IMM-GM-PHD) algorithm is proposed. Firstly, based on the completion of the IMM-GM-PHD algorithm prediction process, the density detection mechanism is added, and the correlation domain is used to select effective measurement for all predicted Gaussian components, and the Density-Based Spatial Clustering of Applications with Noise (DBSCAN) algorithm is combined to detect whether a new formation target appears. Secondly, based on the completion of the state update of the IMM-GM-PHD algorithm, the update of the model probability is completed by updating the composition of the Gaussian component. Finally, in the process of state estimation optimization, combined with the characteristics of formation targets, the similarity discrimination technique is added, and the Jensen-Shannon (JS) divergence is used to measure the similarity between Gaussian components, and the Gaussian components without similar components are eliminated, and the estimation results are further optimized. The simulation results show that the proposed algorithm can track multi-group maneuvering targets quickly and effectively, and has better tracking performance.

|
YU Yihua. Consensus-based distributed linear filter for target tracking with uncertain noise statistics[J]. IEEE Sensors Journal, 2017, 17(15): 4875–4885. doi: 10.1109/JSEN.2017.2712702
|
|
但波, 姜永华, 李敬军, 等. 基于空时融合隐马尔科夫模型的舰艇编队目标识别方法[J]. 电子与信息学报, 2015, 37(4): 926–932. doi: 10.11999/JEIT140589
DAN Bo, JIANG Yonghua, LI Jingju, et al. Ship formation target recognition based on spatial and temporal fusion hidden markov model[J]. Journal of Electronics &Information Technology, 2015, 37(4): 926–932. doi: 10.11999/JEIT140589
|
|
FELDMANN M, FRÄNKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/tsp.2010.2101064
|
|
LAN Jian and LI X R. Tracking of maneuvering non-ellipsoidal extended object or target group using random matrix[J]. IEEE Transactions on Signal Processing, 2014, 62(9): 2450–2463. doi: 10.1109/tsp.2014.2309561
|
|
王婷婷, 缪礼锋, 程然. 海上低空突防群目标跟踪的IMM-Bayesian实现[J]. 海军航空工程学院学报, 2018, 33(1): 111–118. doi: 10.7682/j.issn.1673-1522.2018.01.003
WANG Tingting, MIAO Lifeng, and CHENG Ran. IMM-bayesian tracking algorithm for the sea surface low-altitude penetration group targets[J]. Journal of Naval Aeronautical and Astronautical University, 2018, 33(1): 111–118. doi: 10.7682/j.issn.1673-1522.2018.01.003
|
|
何友, 修建娟, 关欣, 等. 雷达数据处理及应用[M]. 北京: 电子工业出版社, 2013: 191–201.
HE You, XIU Jianjuan, GUAN Xin, et al. Radar Data Processing with Applications[M]. Beijing: Publishing House of Electronics Industry, 2013: 191–201.
|
|
王聪, 王海鹏, 何友, 等. 基于ICP的稳态部分可辨编队目标精细跟踪算法[J]. 北京航空航天大学学报, 2017, 43(6): 1123–1131. doi: 10.13700/j.bh.1001-5965.2016.0421
WANG Cong, WANG Haipeng, HE You, et al. Refined tracking algorithm for steady partly resolvable group targets based on ICP[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6): 1123–1131. doi: 10.13700/j.bh.1001-5965.2016.0421
|
|
WANG Haipeng, SUN Weiwei, JIA Shuyi, et al. A group target track correlation algorithm based on systematic error estimation[C]. 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 1–8. doi: 10.1109/RADAR.2016.8059386.
|
|
MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152–1178. doi: 10.1109/TAES.2003.1261119
|
|
VO B N and MA W K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4091–4104. doi: 10.1109/tsp.2006.881190
|
|
VO B N, SINGH S, and DOUCET A. Sequential Monte Carlo methods for multitarget filtering with random finite sets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224–1225. doi: 10.1109/taes.2005.1561884
|
|
朱友清, 周石琳, 高贵. 结合聚类的GM-PHD滤波器辐射源群目标跟踪[J]. 系统工程与电子技术, 2015, 37(9): 1967–1973. doi: 10.3969/j.issn.1001-506X.2015.09.03
ZHU Youqing, ZHOU Shilin, and GAO Gui. Emitter group targets tracking using GM-PHD filter combined with clustering[J]. Systems Engineering and Electronics, 2015, 37(9): 1967–1973. doi: 10.3969/j.issn.1001-506X.2015.09.03
|
|
WOOD T M. Interacting methods for manoeuvre handling in the GM-PHD filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 3021–3025. doi: 10.1109/TAES.2011.6034685
|
|
WANG Yun, HU Guoping, and LI Zhenxing. Tracking of group targets using multiple models GGIW-PHD algorithm based on best-fitting Gaussian approximation and strong tracking filter[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232(2): 331–343. doi: 10.1177/0954410016684359
|
|
GRANSTROM K and ORGUNER U. On spawning and combination of extended/group targets modeled with random matrices[J]. IEEE Transactions on Signal Processing, 2013, 61(3): 678–692. doi: 10.1109/tsp.2012.2230171
|
|
朱书军, 刘伟峰, 崔海龙. 基于广义标签多伯努利滤波的可分辨群目标跟踪算法[J]. 自动化学报, 2017, 43(12): 2178–2189. doi: 10.16383/j.aas.2017.c160334
ZHU Shujun, LIU Weifeng, and CUI Hailong. Multiple resolvable groups tracking using the GLMB filter[J]. Acta Automatica Sinica, 2017, 43(12): 2178–2189. doi: 10.16383/j.aas.2017.c160334
|
|
SAEEDI EMADI H and MAZINANI S M. A novel anomaly detection algorithm using DBSCAN and SVM in wireless sensor networks[J]. Wireless Personal Communications, 2018, 98(2): 2025–2035. doi: 10.1007/s11277-017-4961-1
|
|
LIN J. Divergence measures based on the Shannon entropy[J]. IEEE Transactions on Information Theory, 1991, 37(1): 145–151. doi: 10.1109/18.61115
|
|
VAN ERVEN T and HARREMOS P. Rényi divergence and Kullback-Leibler divergence[J]. IEEE Transactions on Information Theory, 2014, 60(7): 3797–3820. doi: 10.1109/TIT.2014.2320500
|
|
SCHUHMACHER D, VO B T, and VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447–3457. doi: 10.1109/tsp.2008.920469
|
Figures(14) / Tables(1)



 DownLoad:
DownLoad: