| Citation: | Jin FU, Jing LI, Sibo SUN. Influence of Platform Movement on Acoustic Navigation Circle Intersection Model and Error Analysis[J]. Journal of Electronics & Information Technology, 2020, 42(7): 1652-1660. doi: 10.11999/JEIT190438

|
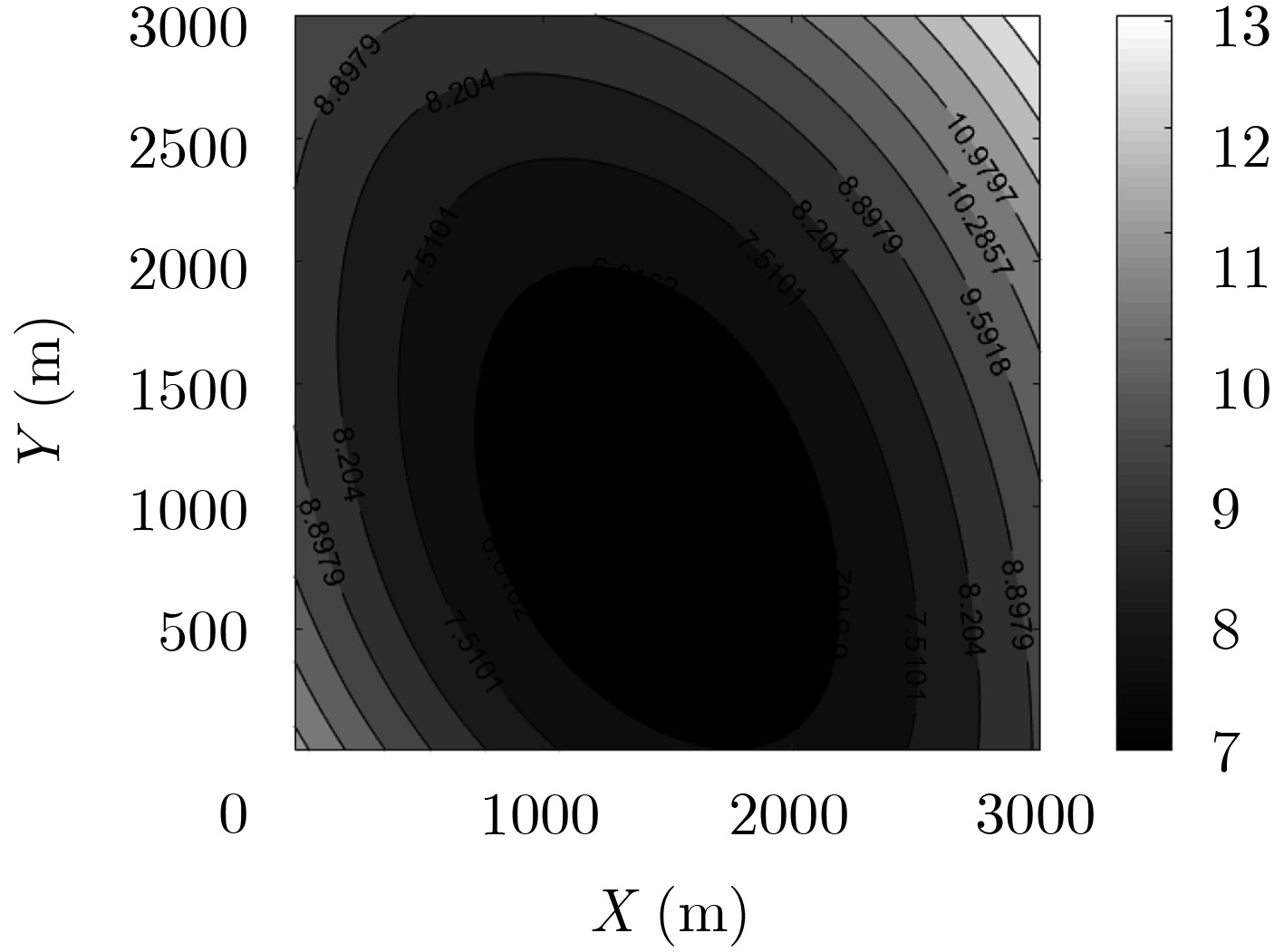
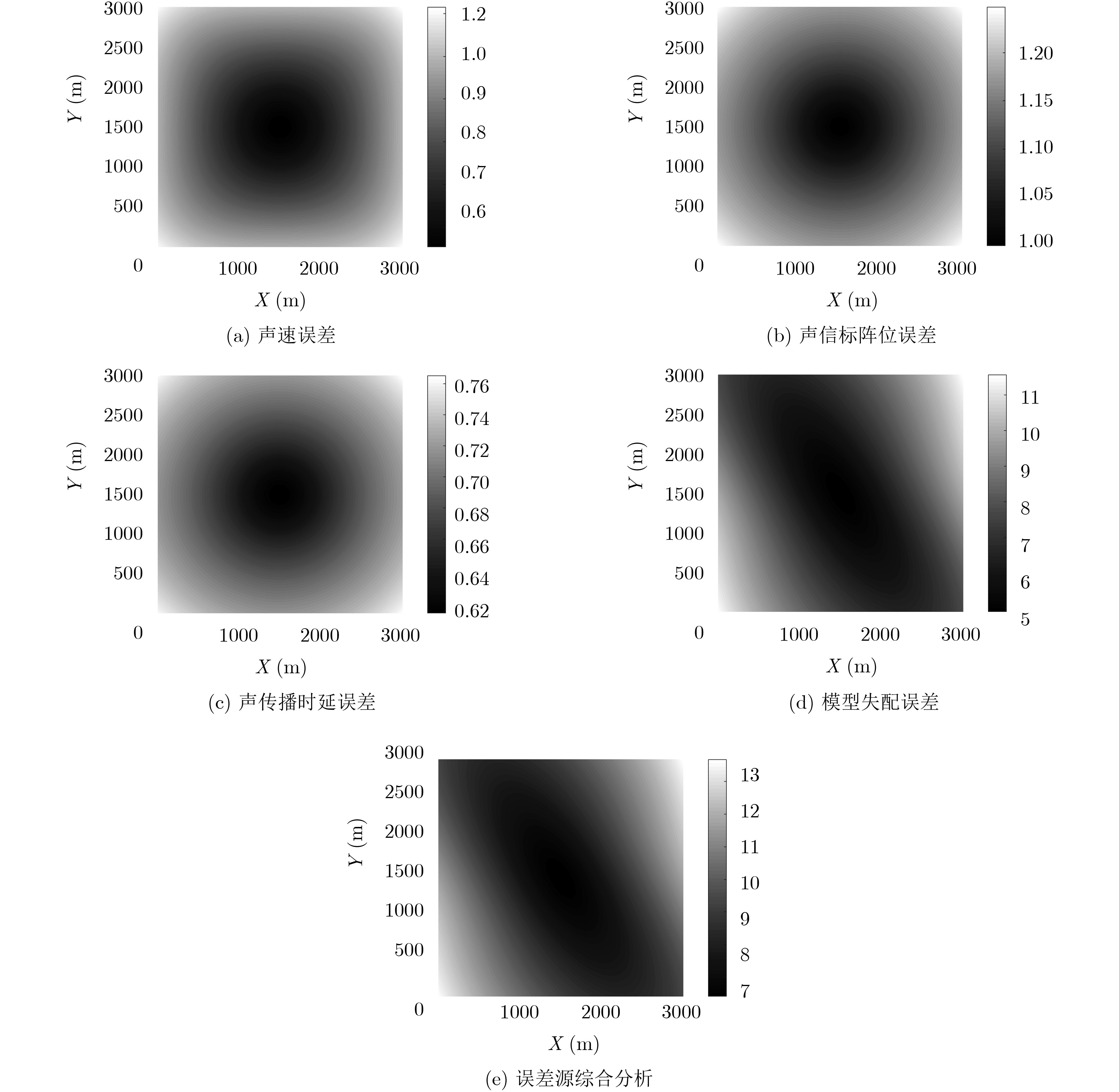
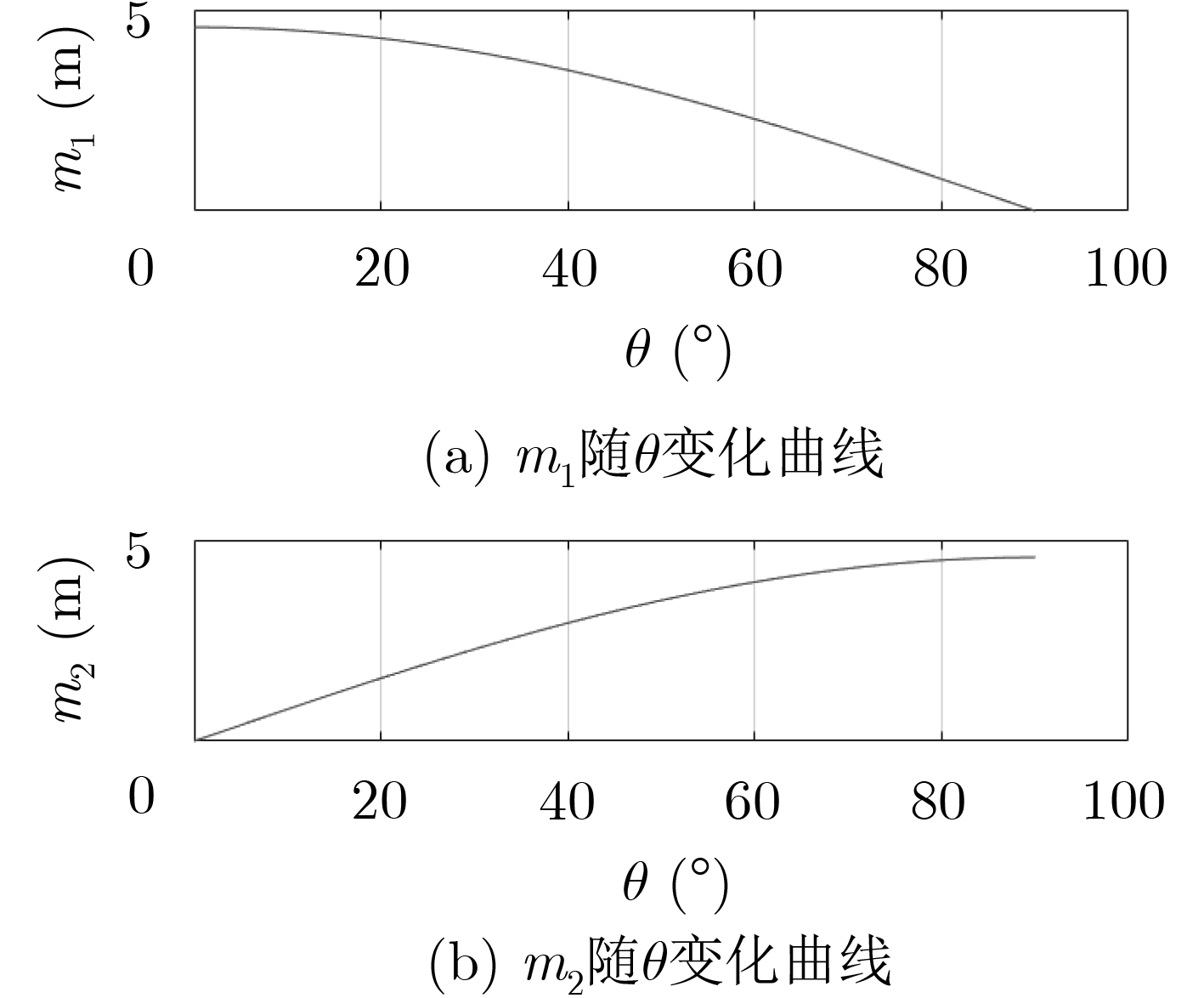
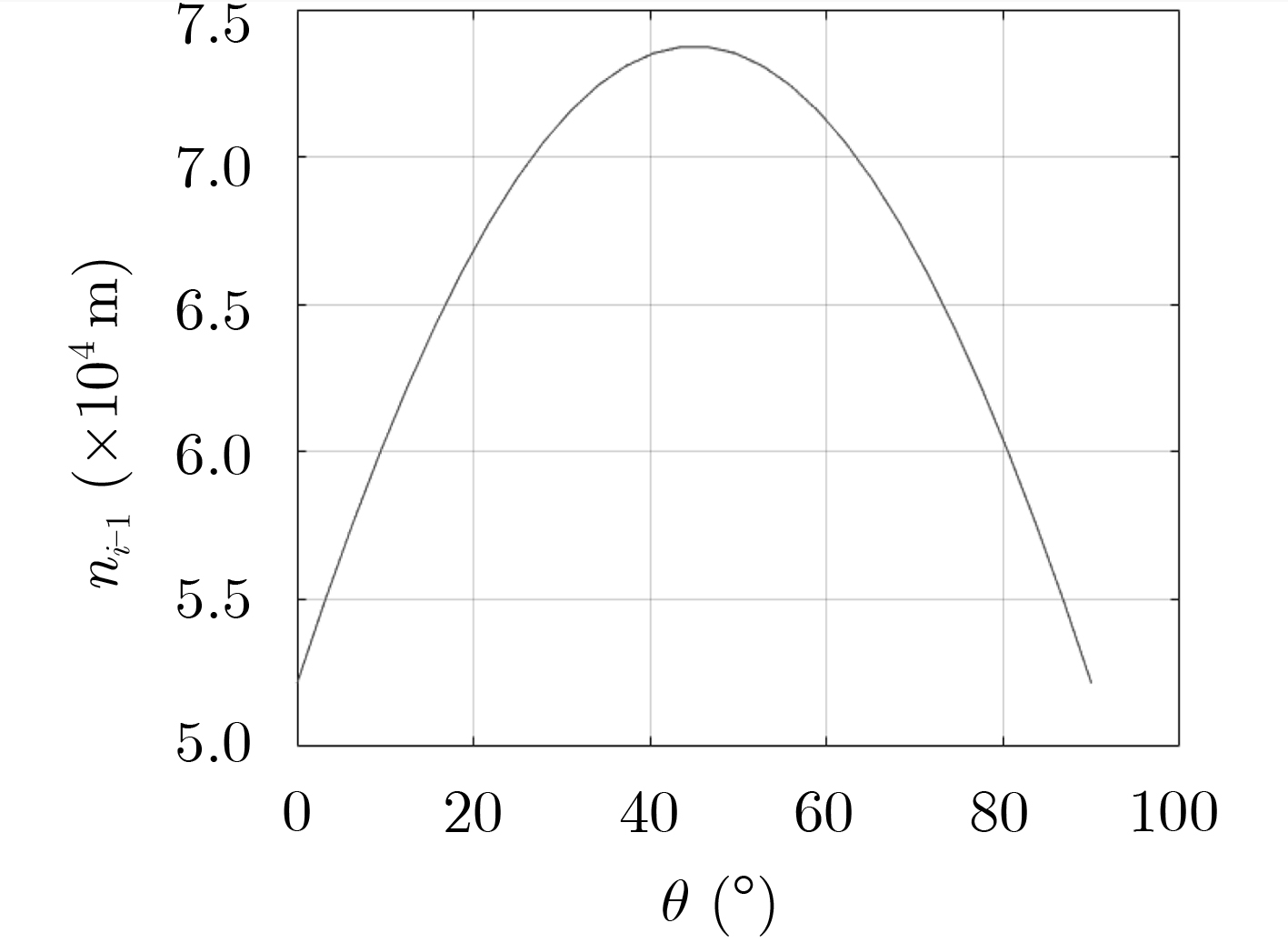
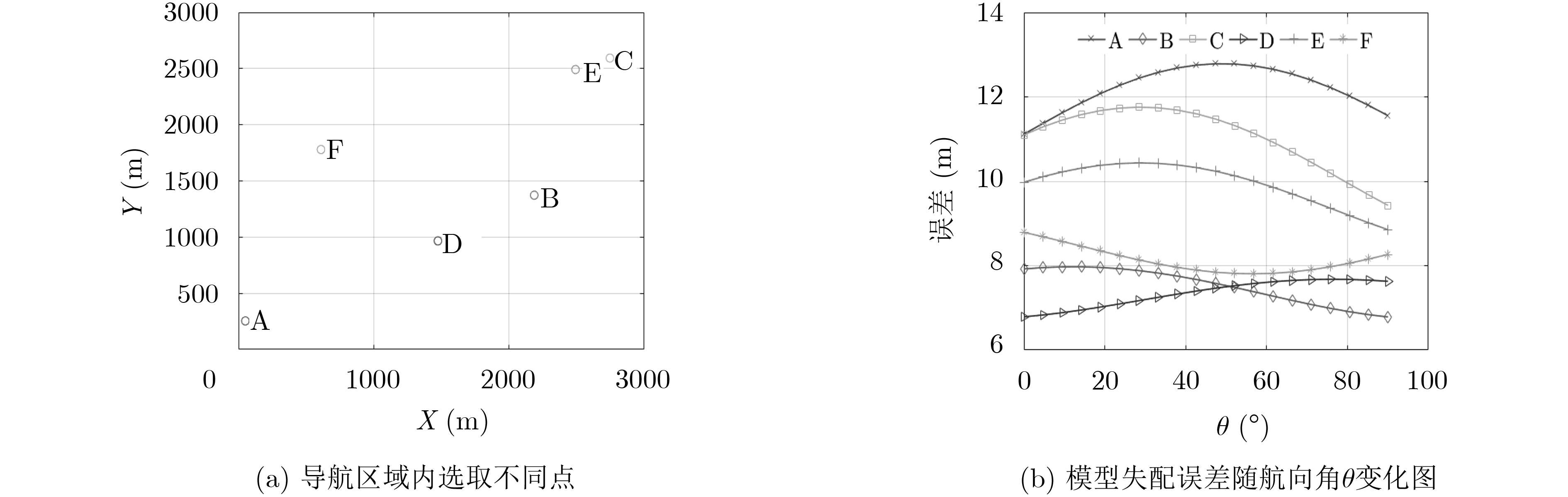
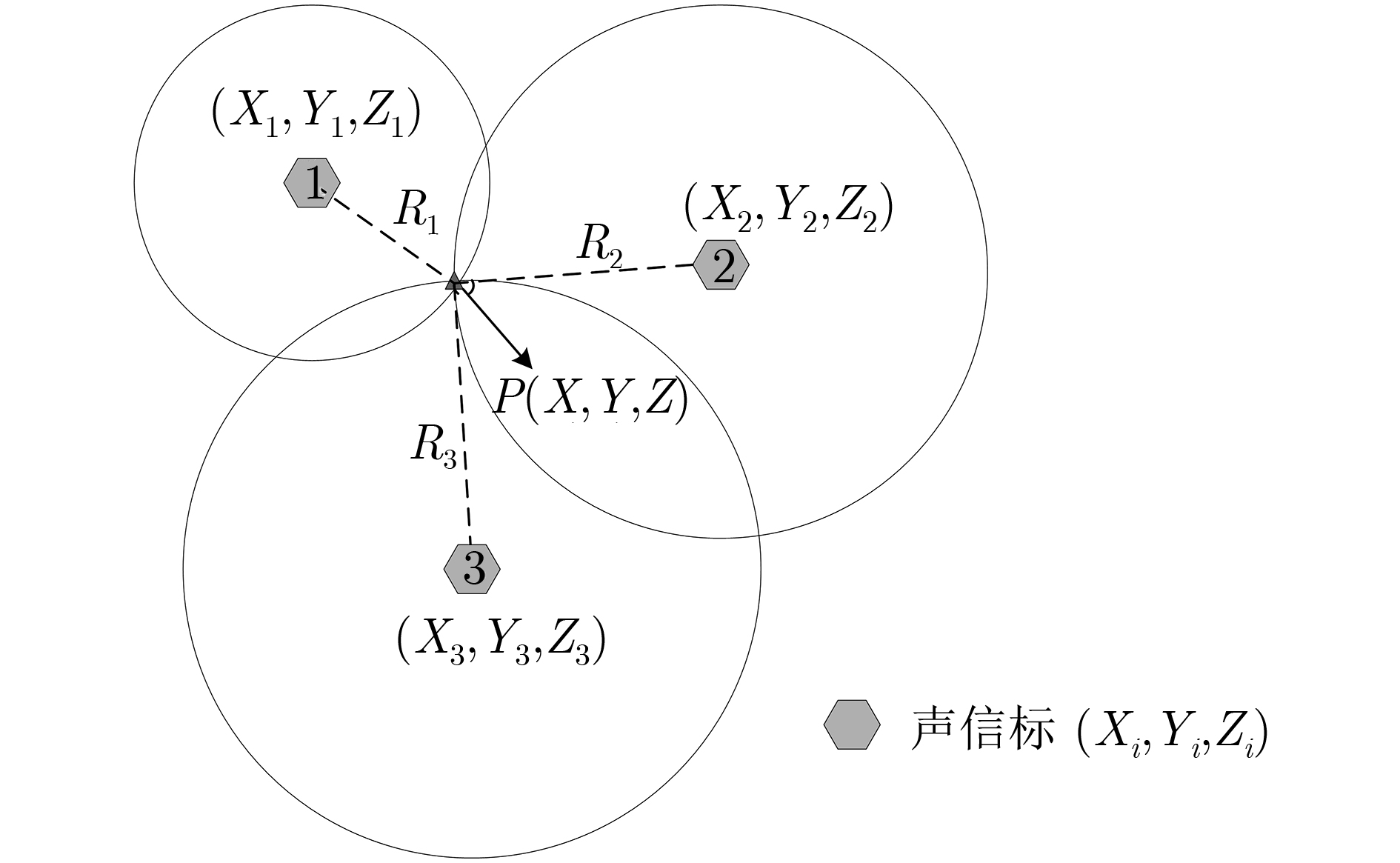
Acoustic navigation technology is widely used for autonomous navigation of underwater mobile platforms. The commonly used acoustic navigation models are mostly circle intersection models. The model is simple in structure and convenient in calculation, but it does not consider the influence of platform motion. It is a static model. Under the condition of platform motion, the time when the platform receives each underwater acoustic beacon (underwater star station node) and the spatial position of the platform are different, that is, there is a difference in time and space, which will cause model mismatch and affect navigation accuracy. Aiming at the above problems, this paper deduces the formula of model mismatch error caused by platform motion, quantitatively analyzes the influence of motion on navigation accuracy and the spatial distribution of error, and focuses on the influence of navigation speed and heading angle on navigation accuracy. The simulation verification is carried out. The results show that the mismatch error of the acoustic navigation circle intersection model exists only when considering the influence of the platform motion, and it is related to the spatial position of the platform in the array. The error space characteristics are approximate concentric elliptic distribution; the model mismatch error is related to the navigation parameters of the platform. The model mismatch error is sensitive to the speed change. As the navigation speed increases, the approximate linear trend increases and the impact is serious. The heading angle has little influence on the global precision variation range, which mainly affects the space of the model mismatch error. The distribution is embodied as a kind of “rotation” with the heading angle, and the direction of the ellipse is aligned with the direction of motion of the platform.

|
张红梅, 赵建虎, 杨鲲, 等. 水下导航定位技术[M]. 武汉: 武汉大学出版社, 2010.
ZHANG Hongmei, ZHAO Jianhu, YANG Kun, et al. Underwater Navigation and Positioning Technology[M]. Wuhan: Wuhan University Press, 2010.
|
|
THOMSON D J M, DOSSO S E, and BARCLAY D R. Modeling AUV localization error in a long baseline acoustic positioning system[J]. IEEE Journal of Oceanic Engineering, 2018, 43(4): 955–968. doi: 10.1109/joe.2017.2771898
|
|
PAULL L, SAEEDI S, SETO M, et al. AUV navigation and localization: A review[J]. IEEE Journal of Oceanic Engineering, 2014, 39(1): 131–149. doi: 10.1109/JOE.2013.2278891
|
|
严浙平, 王璐. UUV水下定位方法的研究现状与进展[J]. 哈尔滨工程大学学报, 2017, 38(7): 989–1000. doi: 10.11990/jheu.201608067
YAN Zheping and WANG Lu. Research status and progress of UUV underwater localization[J]. Journal of Harbin Engineering University, 2017, 38(7): 989–1000. doi: 10.11990/jheu.201608067
|
|
付进. 长基线定位信号处理若干关键技术研究[D]. [博士论文], 哈尔滨工程大学, 2007. doi: 10.7666/d.y1438308.
FU Jin. Research on several key techniques of the signal processing for long baseline location[D]. [Ph.D. dissertation], Harbin Engineering University, 2007. doi: 10.7666/d.y1438308.
|
|
RODIONOV A Y, DUBROVIN F S, UNRU P P, et al. Experimental research of distance estimation accuracy using underwater acoustic modems to provide navigation of underwater objects[C]. The 24th Saint Petersburg International Conference on Integrated Navigation Systems, St. Petersburg, Russia, 2017.
|
|
MORENO-SALINAS D, PASCOAL A M, and ARANDA J. Multiple underwater target positioning with optimally placed acoustic surface sensor networks[J]. International Journal of Distributed Sensor, 2018, 14(5): 1550147718773234. doi: 10.1177/1550147718773234
|
|
张旭, 孙翱, 韩旭, 等. 水下垂向运动目标的海底多基站声定位方法及精度分析[J]. 声学学报, 2019, 44(2): 155–169. doi: 10.15949/j.cnki.0371-0025.2019.02.002
ZHANG Xu, SUN Ao, HAN Xu, et al. Acoustic localization scheme and accuracy analysis for underwater vertical motion target using multi-stations in the seabed[J]. Acta Acustica, 2019, 44(2): 155–169. doi: 10.15949/j.cnki.0371-0025.2019.02.002
|
|
张光普. 导航定位通信一体化系统总体技术研究[D]. [博士论文], 哈尔滨工程大学, 2008. doi: 10.7666/d.y1438314.
ZHANG Guangpu. Research on overall technology of the underwater navigation and location and communication incorporate system[D]. [Ph.D. dissertation], Harbin Engineering University, 2008. doi: 10.7666/d.y1438314.
|
|
ALLOTTA B, CAITI A, CHISCI L, et al. An unscented Kalman filter based navigation algorithm for autonomous underwater vehicles[J]. Mechatronics, 2016, 39: 185–195. doi: 10.1016/j.mechatronics.2016.05.007
|
|
ZHANG Jucheng, SHI Chunhao, SUN Dajun, et al. High-precision, limited-beacon-aided AUV localization algorithm[J]. Ocean Engineering, 2018, 149: 106–112. doi: 10.1016/j.oceaneng.2017.12.003
|
|
曹俊, 郑翠娥, 孙大军, 等. 水下载体的声学定位系统测距误差分析[J]. 南京大学学报: 自然科学版, 2016, 52(5): 816–824. doi: 10.13232/j.cnki.jnju.2016.05.007
CAO Jun, ZHENG Cui’e, SUN Dajun, et al. Ranging error analysis of acoustic positioning system for underwater vehicle[J]. Journal of Nanjing University:Natural Sciences, 2016, 52(5): 816–824. doi: 10.13232/j.cnki.jnju.2016.05.007
|
|
张立川, 徐德民, 刘明雍, 等. 基于移动长基线的多AUV协同导航[J]. 机器人, 2009, 31(6): 581–585, 593. doi: 10.13973/j.cnki.robot.2009.06.017
ZHANG Lichuan, XU Demin, LIU Mingyong, et al. Cooperative navigation of multiple AUVs using moving long baseline[J]. Robot, 2009, 31(6): 581–585, 593. doi: 10.13973/j.cnki.robot.2009.06.017
|
|
孙微, 王方勇, 乔钢, 等. 基于长基线水声定位系统误差分析以及定位精度研究[J]. 声学与电子工程, 2016(2): 14–19, 24.
SUN Wei, WANG Fangyong, QIAO Gang, et al. Research on error analysis and positioning accuracy based on long baseline underwater acoustic positioning system[J]. Acoustics and Electronics Engineering, 2016(2): 14–19, 24.
|
|
张居成. 深水长基线定位导航技术研究[D]. [博士论文], 哈尔滨工程大学, 2014.
ZHANG Jucheng. Research of deepwater LBL positoning and navigation technology[D]. [Ph.D. dissertation], Harbin Engineering University, 2014.
|
|
李莉. 长基线阵测阵校阵技术研究[D]. [硕士论文], 哈尔滨工程大学, 2007. doi: 10.7666/d.y1098218.
LI Li. Study on array measuring & calibration for long base line array[D]. [Master dissertation], Harbin Engineering University, 2007. doi: 10.7666/d.y1098218.
|
|
李翔宇. 长基线高精度定位方法研究与实现[D]. [硕士论文], 哈尔滨工程大学, 2017.
LI Xiangyu. Research and implementation of long base line high precision positioning[D]. [Master dissertation], Harbin Engineering University, 2017.
|
|
TURETTA A, CASALINO G, SIMETTI E, et al. Analysis of the accuracy of a LBL-based underwater localization procedure[C]. 2014 Oceans, St. John's, Canada, 2015. doi: 10.1109/OCEANS.2014.7003093.
|
|
TONG Jinwu, XU Xiaosu, HOU Lanhua, et al. An ultra-short baseline positioning model based on rotating array & reusing elements and its error analysis[J]. Sensors, 2019, 19(20): 4373. doi: 10.3390/s19204373
|
Figures(9) / Tables(3)



 DownLoad:
DownLoad: