| Citation: | Xiaoping JIANG, Miaoyu WANG, Hao DING, Chenghua LI. Passive Fingerprint Indoor Positioning Based on CSI Amplitude-phase[J]. Journal of Electronics & Information Technology, 2020, 42(5): 1165-1171. doi: 10.11999/JEIT180871

|
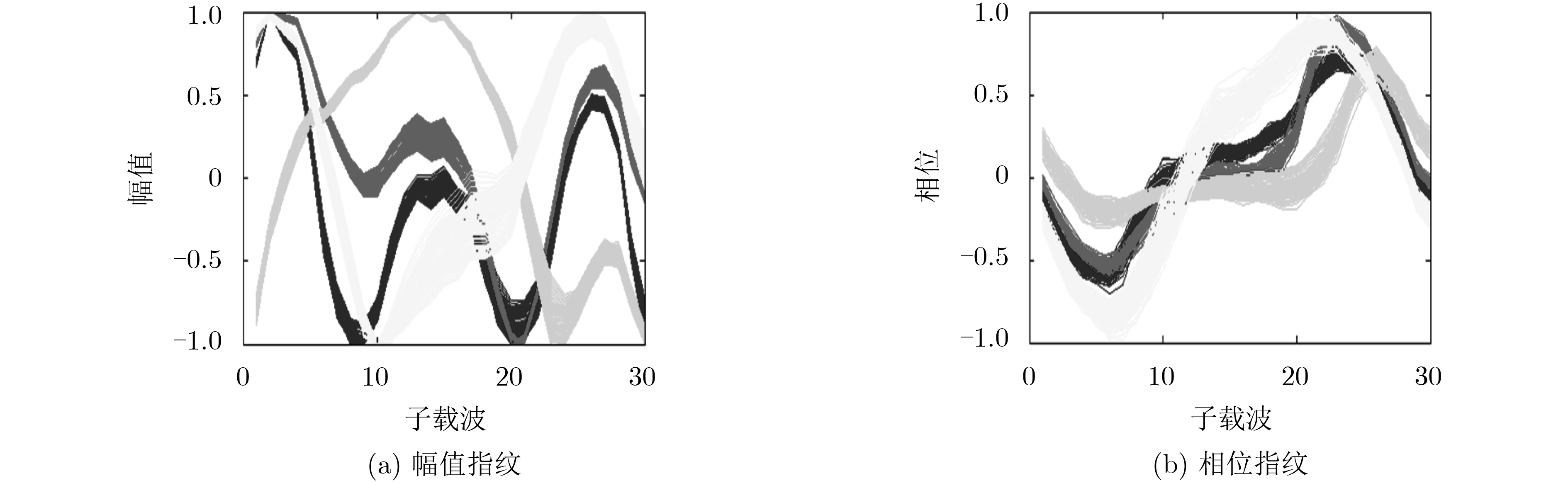
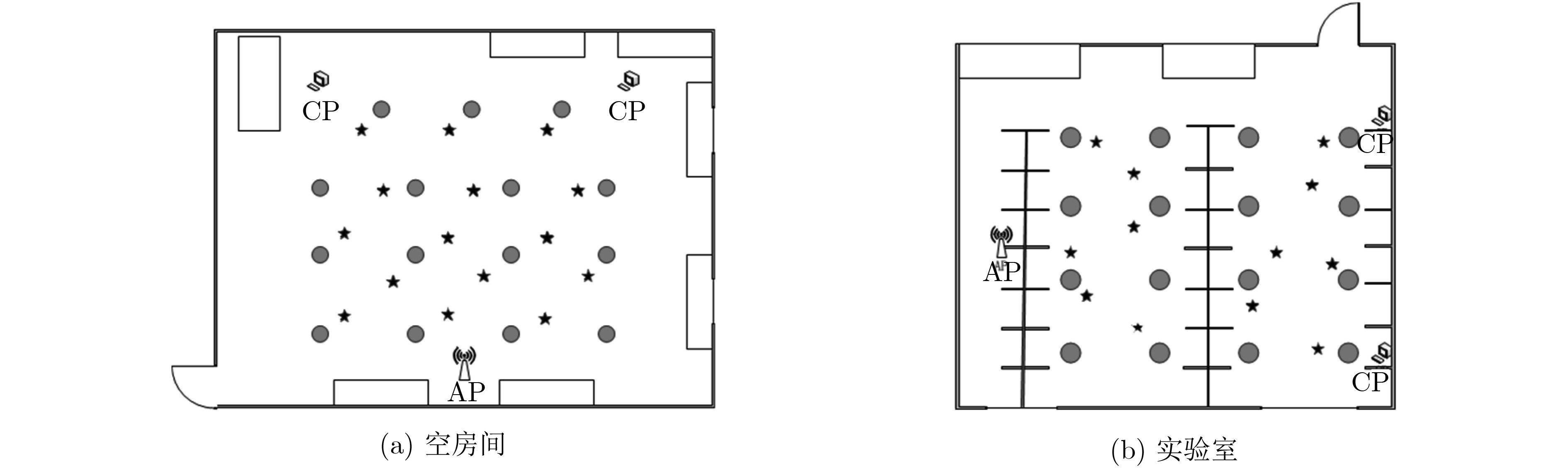
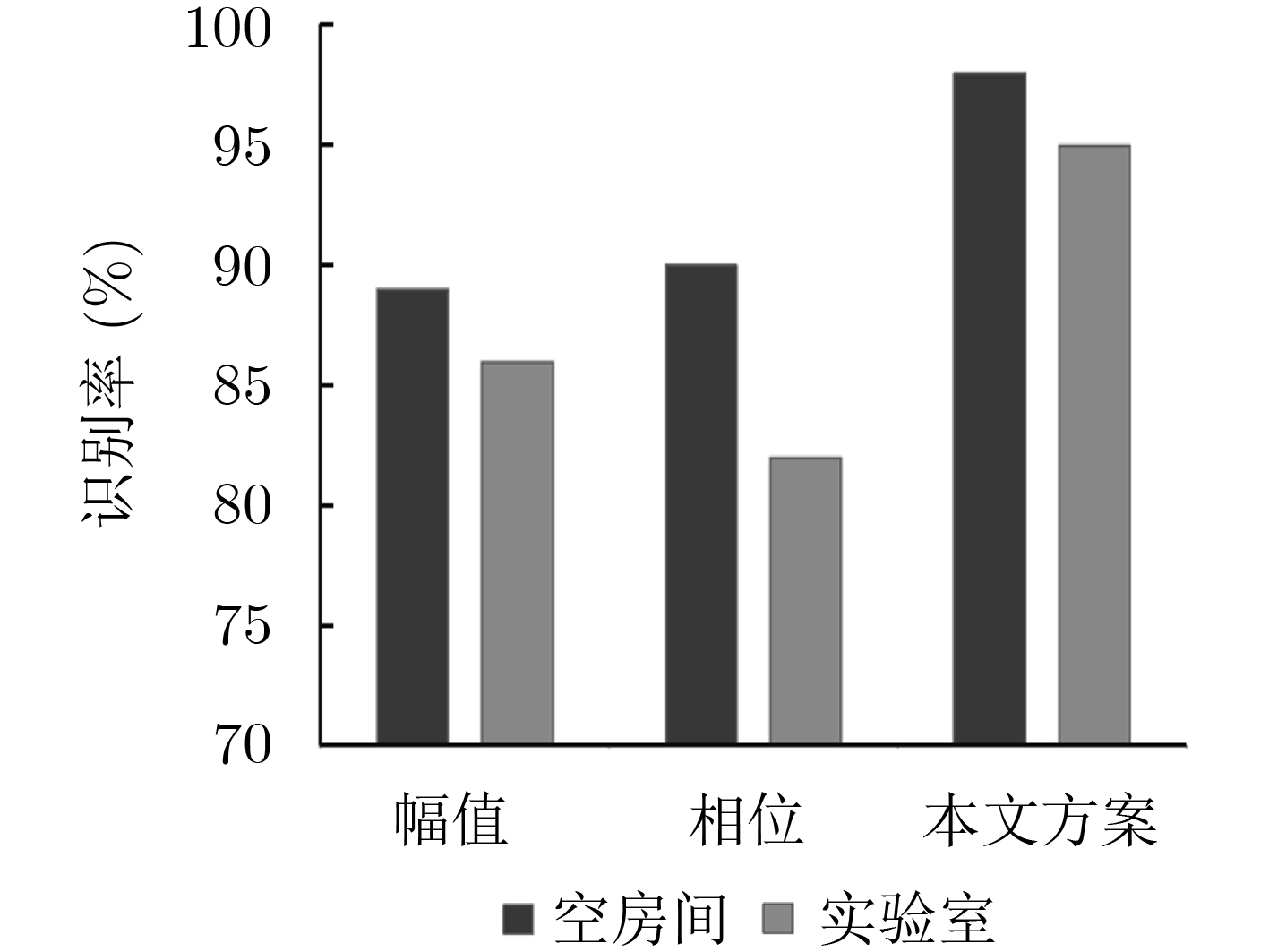
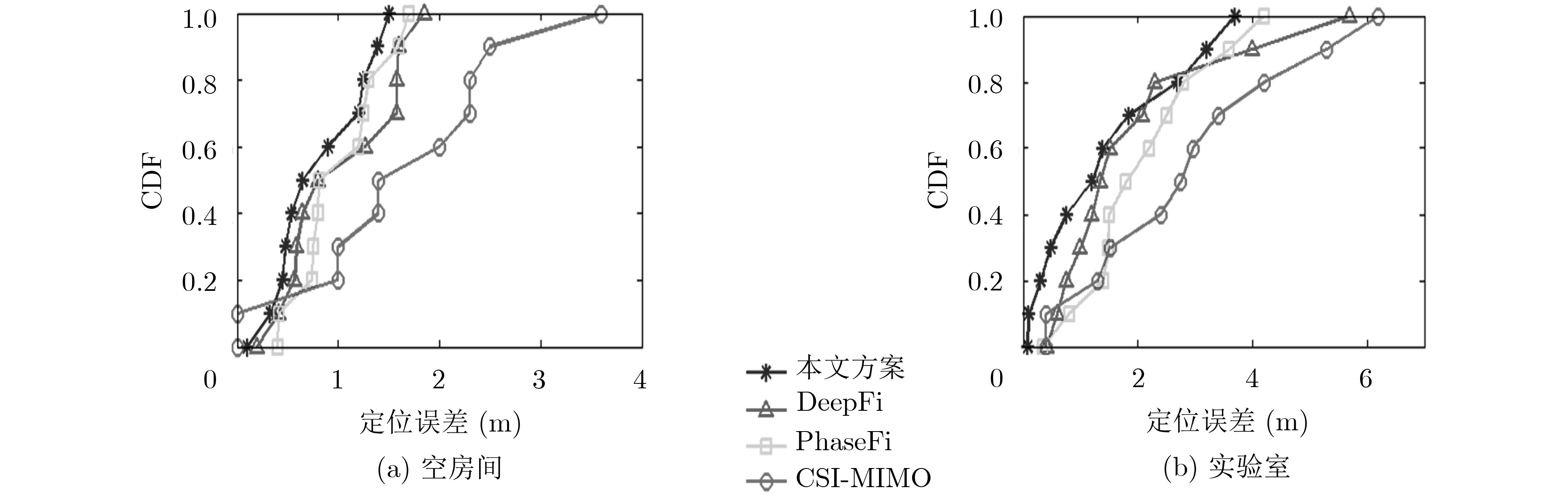
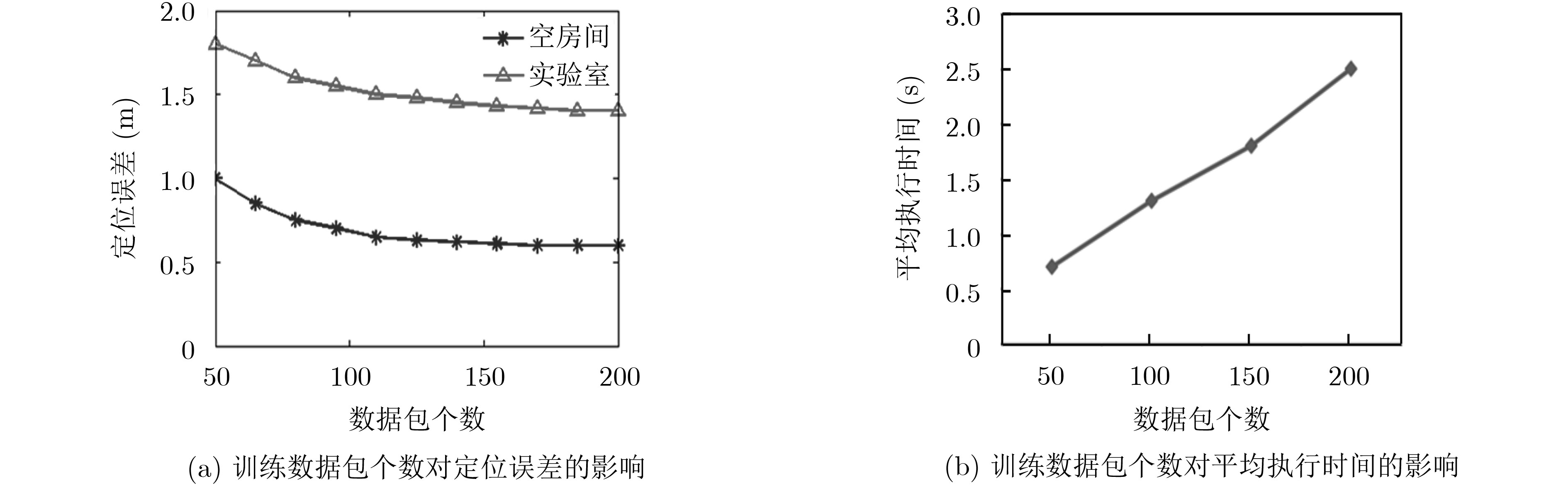
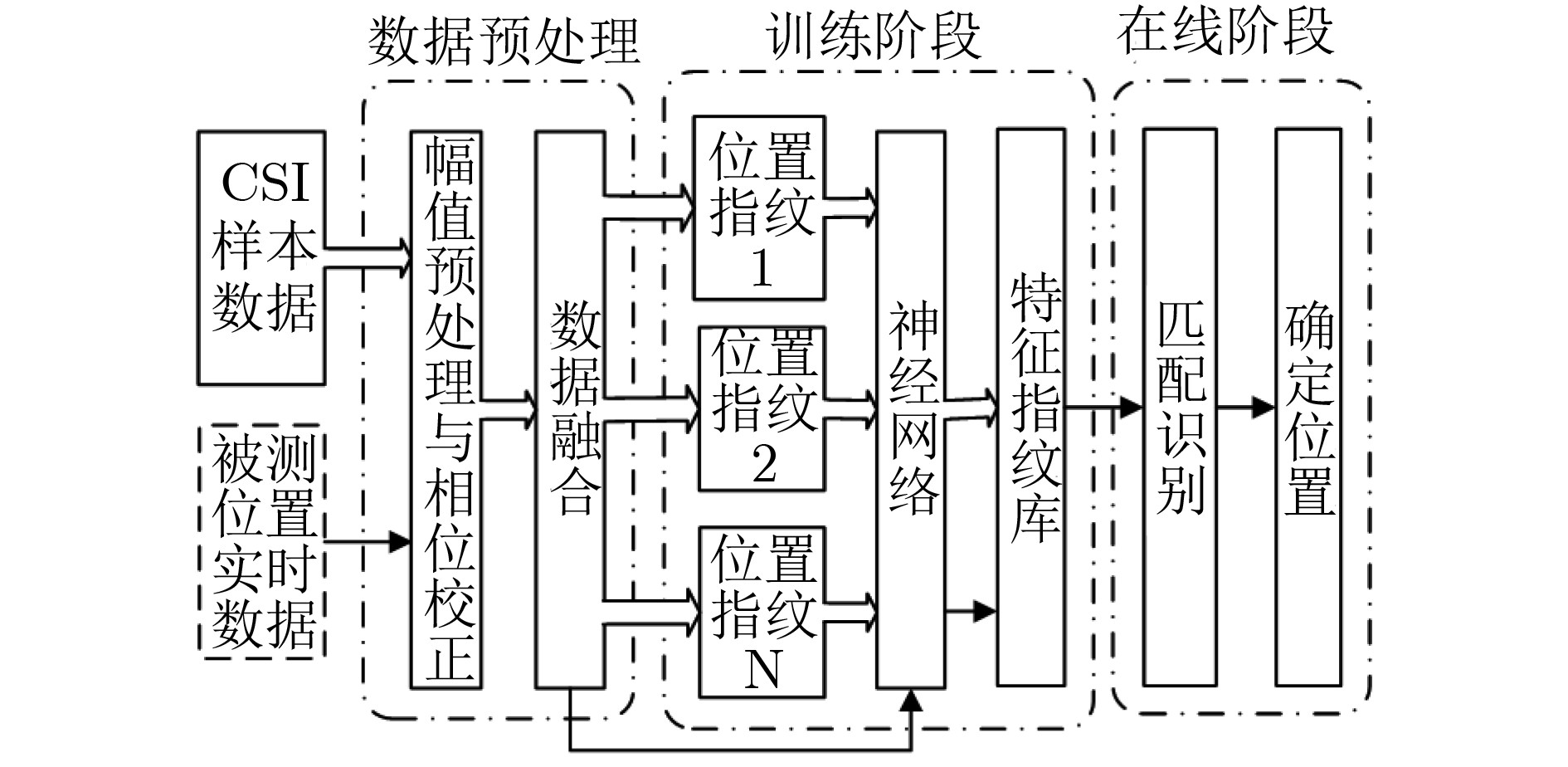
Indoor positioning technology based on Channel State Information (CSI) receives much attention in recent years. The existing indoor positioning solution is continuously innovative and improved in terms of deployment implementation and positioning accuracy. This paper proposes a passive one-transmitter two-receivers fingerprint indoor positioning system. The CSI data is collected by two fixed receiving end-devices. In the signal preprocessing stage, the CSI amplitude is singular value removed and low pass filtered, and the CSI phase is corrected by a linear fitting method, and the CSI amplitude and phase information obtained by the two receiving ends are collectively used as fingerprint samples. The fingerprint samples are finally trained through the fully connected neural network, and matched with the collected real-time data. Experiments show that the matching recognition rate reaches 98% by using two receivers and the combination of amplitude and phase positioning, and the positioning accuracy is 0.69 m. It proves that the system can accurately and effectively achieve indoor positioning.

|
ZHUANG Yuan, YANG Jun, LI You, et al. Smartphone-based indoor localization with bluetooth low energy beacons[J]. Sensors, 2016, 16(5): No. 596. doi: 10.3390/s16050596
|
|
BANDIRMALI N and TORLAK M. ERLAK: On the cooperative estimation of the real-time RSSI based location and k constant term[J]. Wireless Personal Communications, 2017, 95(4): 3923–3932. doi: 10.1007/s11277-017-4032-7
|
|
KOO J and CHA Hojung. Localizing WiFi access points using signal strength[J]. IEEE Communications Letters, 2011, 15(2): 187–189. doi: 10.1109/LCOMM.2011.121410.101379
|
|
LI Jinsong, LI Yunzhou, and JI Xinsheng. A novel method of Wi-Fi indoor localization based on channel state information[C]. The 8th International Conference on Wireless Communications & Signal Processing, Yangzhou, China, 2016: 1–5.
|
|
WU Yang, GONG Liangyi, MAN Dapeng, et al. Enhancing the performance of indoor device-free passive localization[J]. International Journal of Distributed Sensor Networks, 2015, 2015: 256162. doi: 10.1155/2015/256162
|
|
WANG Xuyu, GAO Lingjun, MAO Shiwen, et al. DeepFi: Deep learning for indoor fingerprinting using channel state information[C]. 2015 IEEE Wireless Communications and Networking Conference, New Orleans, USA, 2015: 1666–1671.
|
|
WANG Xuyu, GAO Lingjun, and MAO Shiwen. CSI phase fingerprinting for indoor localization with a deep learning approach[J]. IEEE Internet of Things Journal, 2016, 3(6): 1113–1123. doi: 10.1109/JIOT.2016.2558659
|
|
ZHOU Rui, LU Xiang, ZHAO Pengbiao, et al. Device-free presence detection and localization with SVM and CSI fingerprinting[J]. IEEE Sensors Journal, 2017, 17(23): 7990–7999. doi: 10.1109/JSEN.2017.2762428
|
|
CHAPRE Y, IGNJATOVIC A, SENEVIRATNE A, et al. CSI-MIMO: Indoor Wi-Fi fingerprinting system[C]. The 39th Annual IEEE Conference on Local Computer Networks, Edmonton, Canada, 2014: 202–209.
|
|
YANG Zheng, ZHOU Zimu, and LIU Yunhao. From RSSI to CSI: Indoor localization via channel response[J]. ACM Computing Surveys, 2013, 46(2): No. 25. doi: 10.1145/2543581.2543592
|
|
WU Chenshu, YANG Zheng, and LIU Yunhao. Smartphones based crowdsourcing for indoor localization[J]. IEEE Transactions on Mobile Computing, 2015, 14(2): 444–457. doi: 10.1109/TMC.2014.2320254
|
|
WANG Yan, LIU Jian, CHEN Yingying, et al. E-eyes: Device-free location-oriented activity identification using fine-grained WiFi signatures[C]. The 20th Annual International Conference on Mobile Computing and Networking, Maui, USA, 2014: 617–628.
|
|
ZHOU Yiwei, ZHU Hongzi, XUE Hua, et al. Perceiving accurate CSI phases with commodity WiFi devices[C]. IEEE NFOCOM 2017-IEEE Conference on Computer Communications, Atlanta, USA, 2017: 1–9.
|
|
WANG Xuyu, YANG Chao, and MAO Shiwen. TensorBeat: Tensor decomposition for monitoring multiperson breathing beats with commodity WiFi[J]. ACM Transactions on Intelligent Systems and Technology, 2018, 9(1): No. 8. doi: 10.1145/3078855
|
|
BRUNATO M and BATTITI R. Statistical learning theory for location fingerprinting in wireless LANs[J]. Computer Networks, 2005, 47(6): 825–845. doi: 10.1016/j.comnet.2004.09.004
|
Figures(7) / Tables(1)



 DownLoad:
DownLoad: