| Citation: | Guoyu ZUO, Tingting DU, Lei MA, Jiahao LU, Daoxiong Gong. Region Proposal Generation for Object Detection Using Tree-DDQN by Action Attention[J]. Journal of Electronics & Information Technology, 2019, 41(3): 666-673. doi: 10.11999/JEIT180358

|
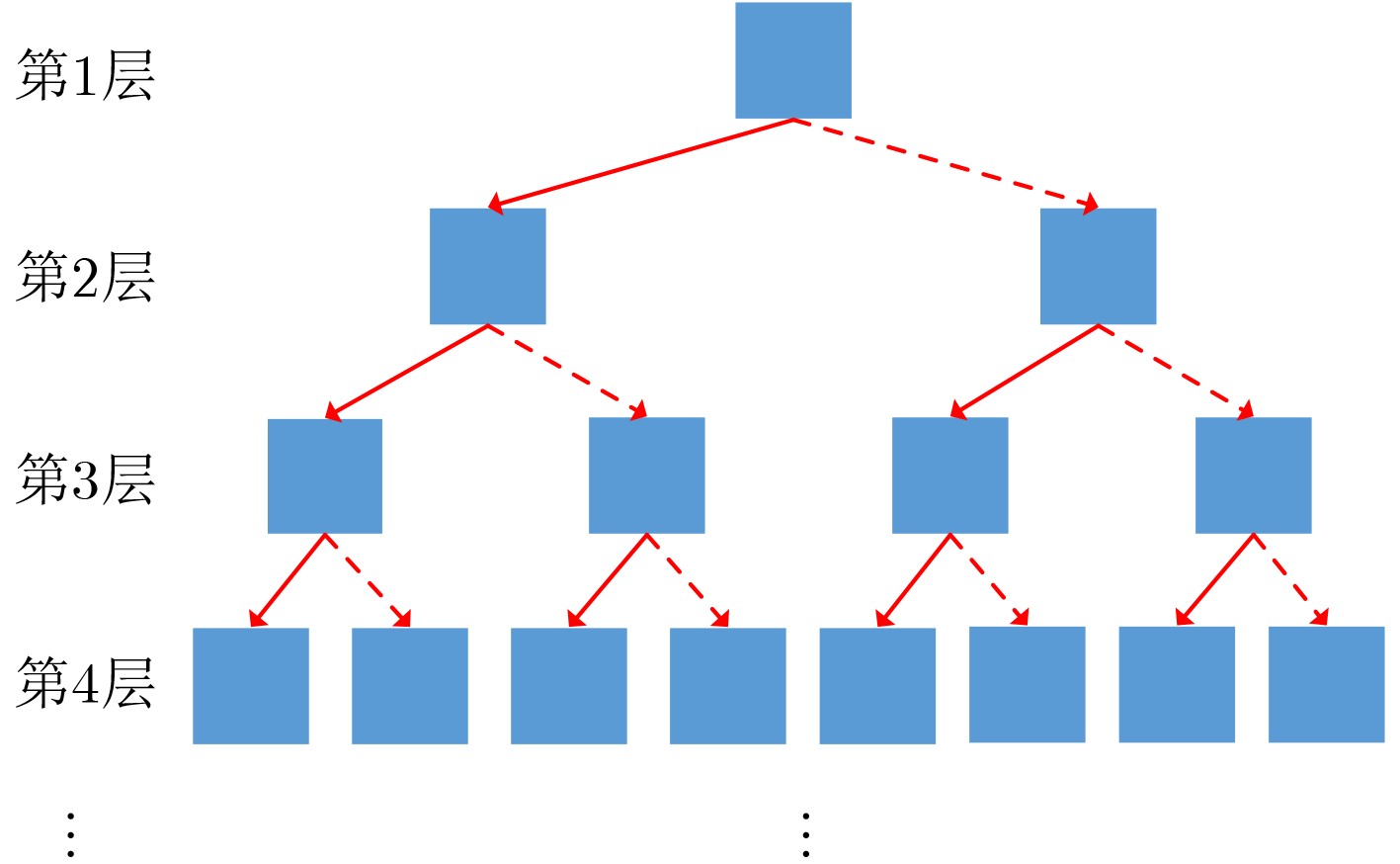
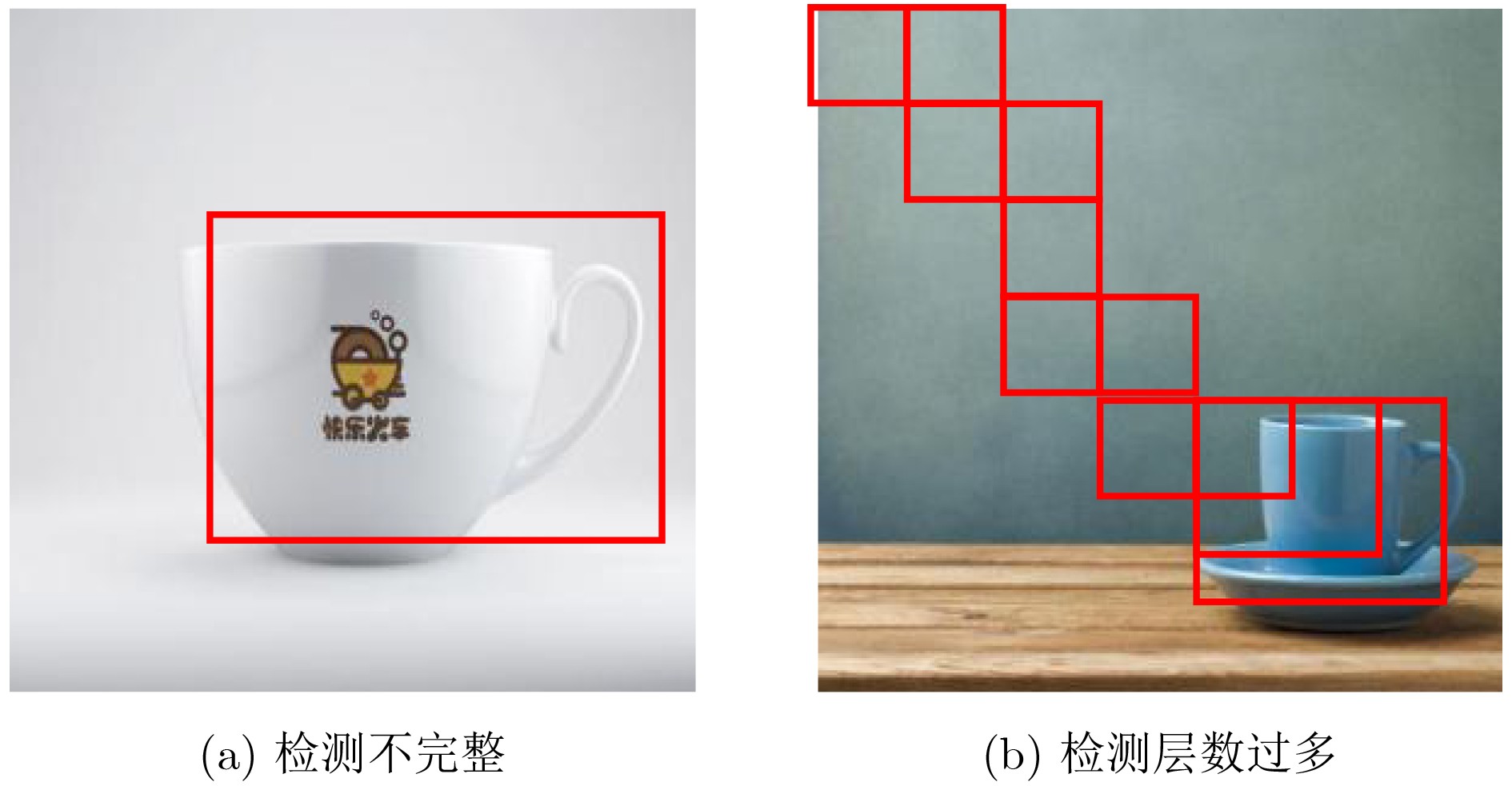
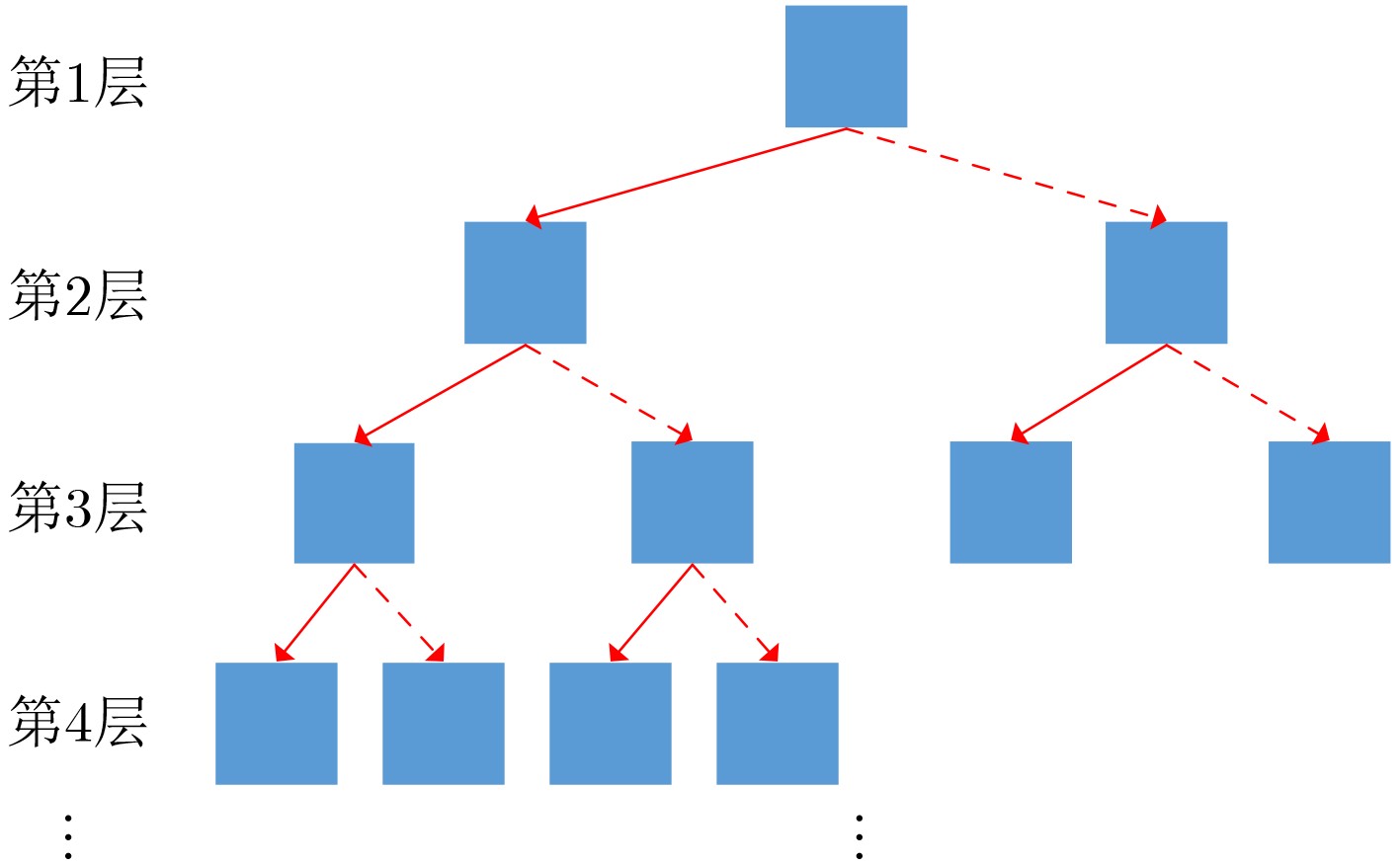
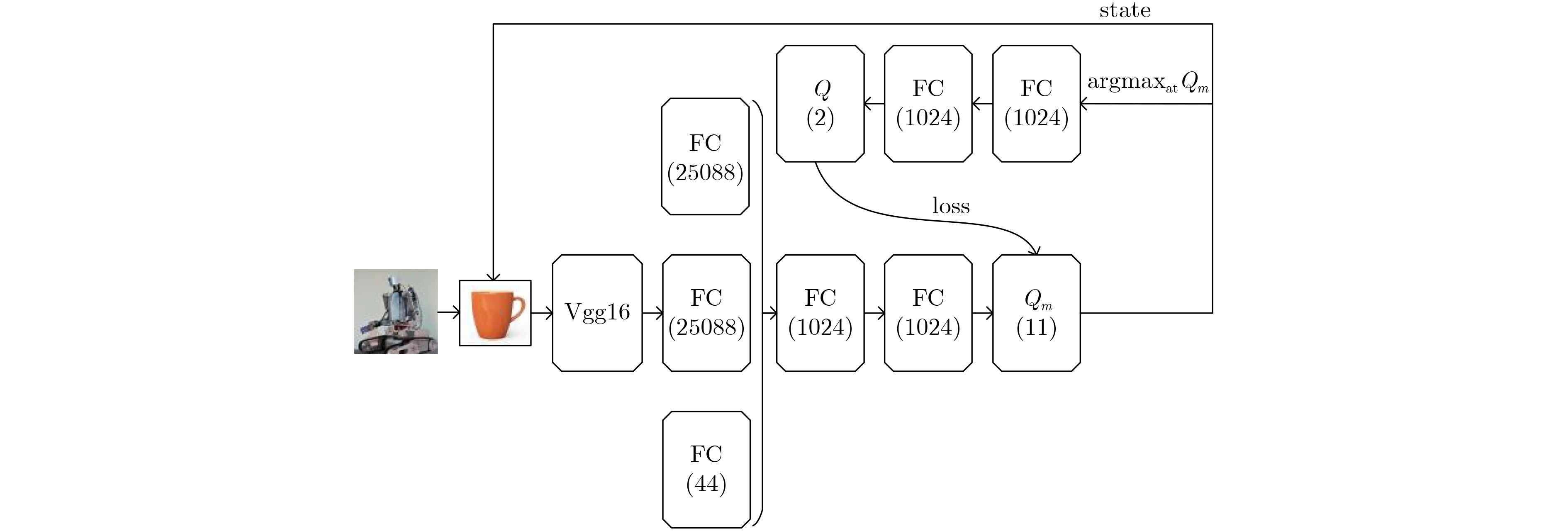
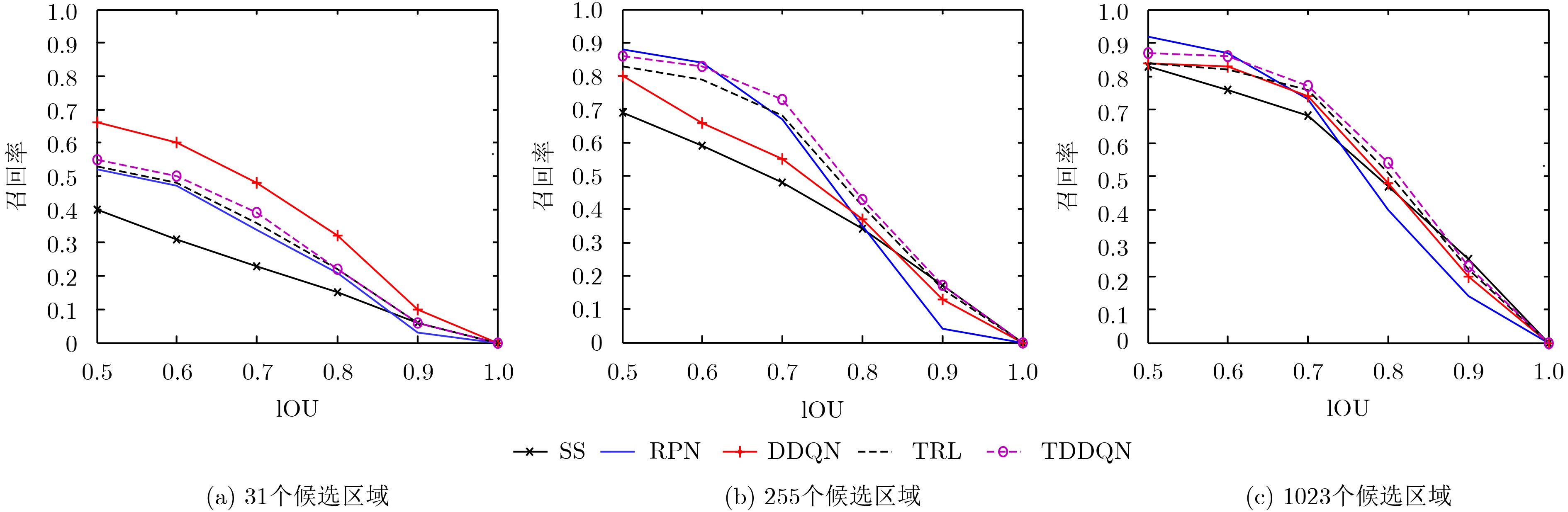
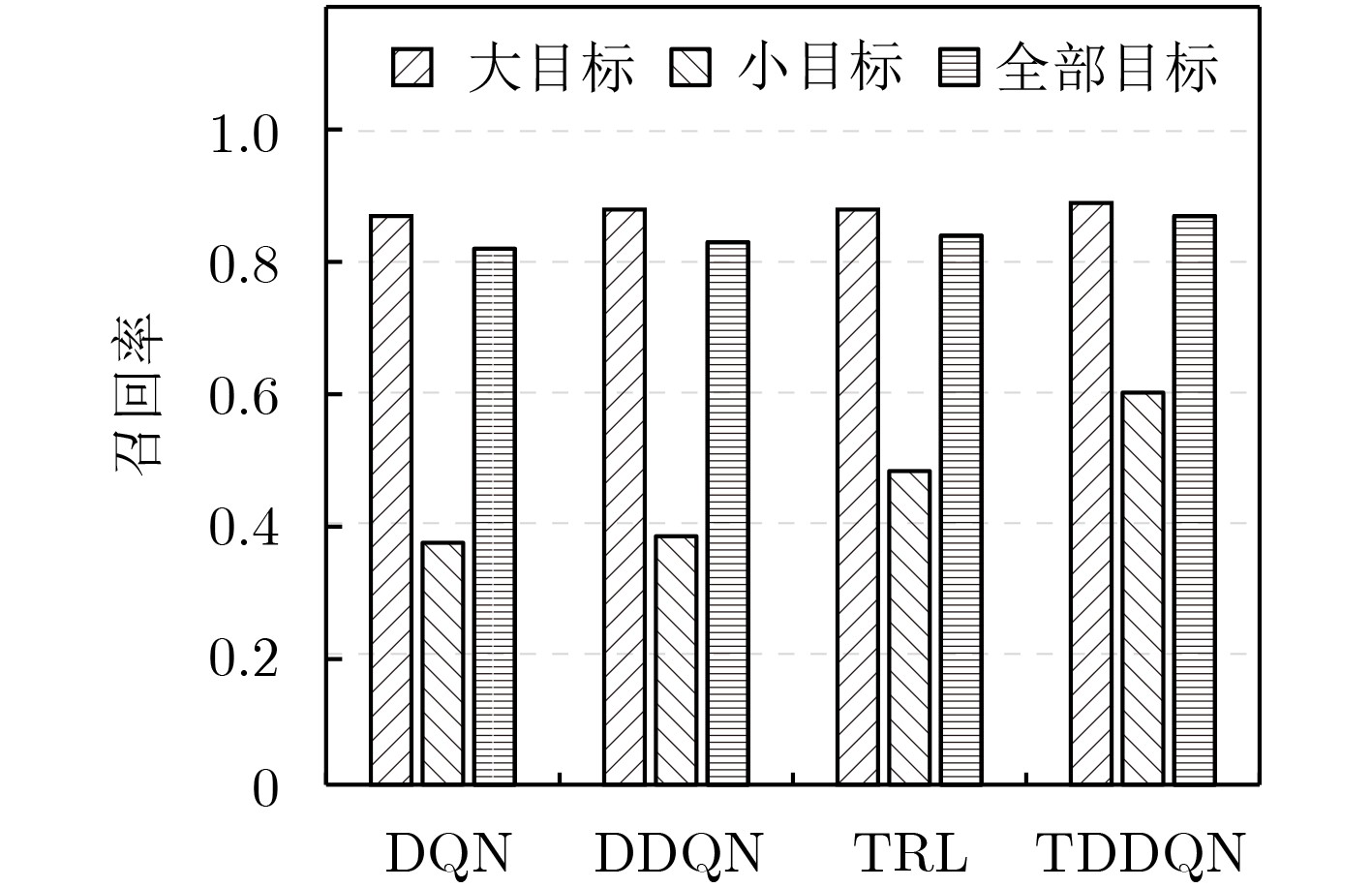
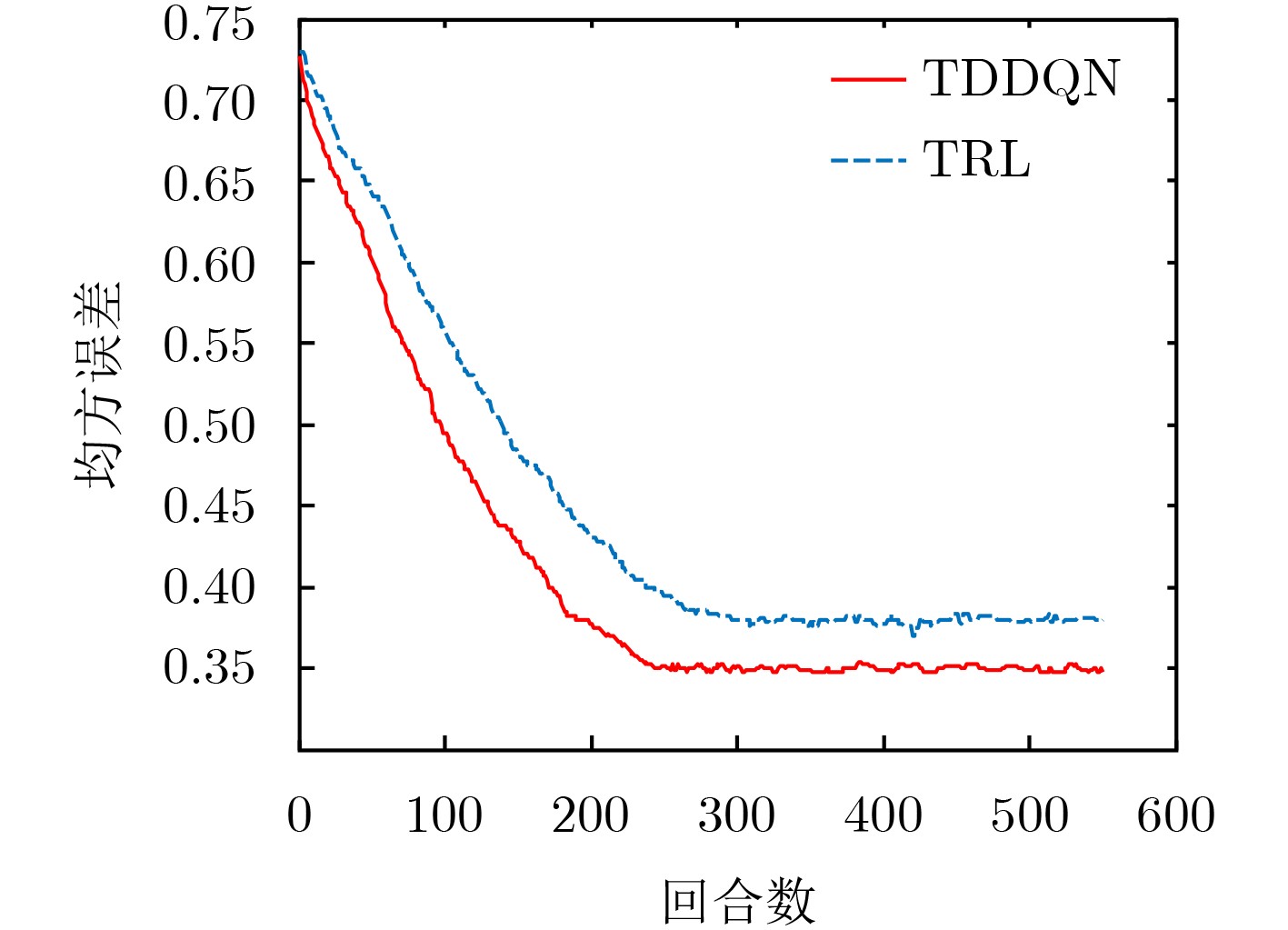
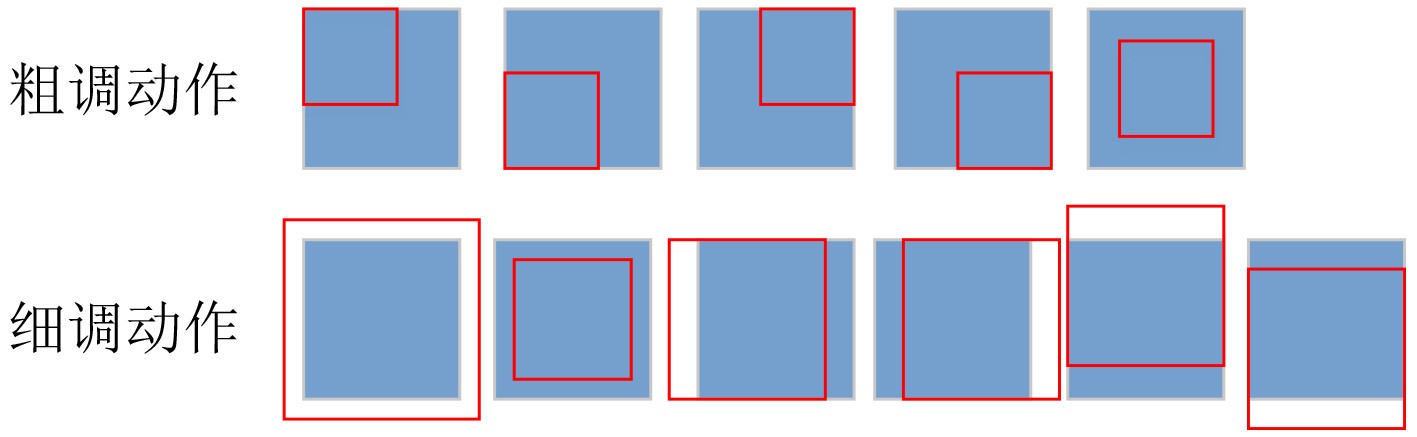
Considering the problem of object detection of robots in the home environments, a Tree-Double Deep Q Network (TDDQN) based on the attention action strategy is proposed to determine the locations of region proposals. It combines DDQN with hierarchical tree structure. First, DDQN is used to select the best action of current state and obtain the right region proposal with a few actions executed. According to the state obtained after executing the selected action, the above process is repeated to create multiple "best" paths of the hierarchical tree structure. The best region proposal is selected using non-maximum suppression on region proposals that meet the conditions. Experimental results on Pascal VOC2007 and Pascal VOC2012 show that the proposed method based on TDDQN has better detection performance than other methods for region proposals of different numbers, different Intersection-over-Union (IoU) values and objects of different sizes and kinds, respectively.

|
TANG K, JOULIN A, LI L J, et al. Co-localization in real-world images[C]. Computer Vision and Pattern Recognition, Columbus, USA, 2014: 1464–1471.
|
|
伍锡如, 黄国明, 孙立宁. 基于深度学习的工业分拣机器人快速视觉识别与定位算法[J]. 机器人, 2016, 38(6): 711–719. doi: 10.13973/j.cnki.robot.2016.0711
WU Xiru, HUANG Guoming, and SUN Lining. Fast visual identification and location algorithm for industrial sorting robots based on deep learning[J]. Robot, 2016, 38(6): 711–719. doi: 10.13973/j.cnki.robot.2016.0711
|
|
DALAL N and TRIGGS B. Histograms of oriented gradients for human detection[C]. Computer Vision and Pattern Recognition, San Diego, USA, 2005: 886–893.
|
|
SANDE K E A V D, UIJLINGS J R R, GEVERS T, et al. Segmentation as selective search for object recognition[C]. International Conference on Computer Vision, Barcelona, Spain, 2011, 1879–1886.
|
|
ZITNICK C L and DOLLAR P. Edge boxes: Locating object proposals from edges[C]. European Conference on Computer Vision, Zurich, Switzerland, 2014, 391–405.
|
|
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. Computer Vision and Pattern Recognition, Columbus, USA, 2014, 580–587.
|
|
GONZALEZ-GARCIA A, Vezhnevets A, and FERRARI V. An active search strategy for efficient object class detection[C]. Computer Vision and Pattern Recognition, Boston, USA, 2015, 3022–3031.
|
|
CAICEDO J C and LAZEBNIK S. Active object localization with deep reinforcement learning[C]. International Conference on Computer Vision, Santiago, Chile, 2015, 2488–2496.
|
|
BELLVER M, GIROINIETO X, MARQUES F, et al. Hierarchical object detection with deep reinforcement learning[OL]. http://arxiv.org/abs/1611.03718v2, 2016. doi: 10.3233/978-1-61499-822-8-164.
|
|
JIE Zequn, LIANG Xiaodan, FENG Jiashi, et al. Tree-structured reinforcement learning for sequential object localization[C]. International Conference on Neural Information Processing Systems, Barcelona, Spain, 2016, 127–135.
|
|
HASSELT H V. Double Q-learning[C]. International Conference on Neural Information Processing Systems, Whistler, Canada, 2010, 2613–2621.
|
|
HASSELT H V, GUEZ A, and SILVER D. Deep reinforcement learning with double Q-learning[C]. Association for the Advancement of Artificial Intelligence, Phoenix, USA, 2016, 2094–2100.
|
|
REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, 39(6): 1137–1149. doi: 10.1109/TPAMI.2016.2577031
|
|
NAJEMNIK J and GEISLER W S. Optimal eye movement strategies in visual search[J]. American Journal of Ophthalmology, 2005, 139(6): 1152–1153. doi: 10.1038/nature03390
|
Figures(9) / Tables(4)



 DownLoad:
DownLoad: