| Citation: | Xiaoyan DU, Jiang QIAO, Peipei WEI. Real-time Correction Model for Zenith Tropospheric Delay Applied to the Chinese Region[J]. Journal of Electronics & Information Technology, 2019, 41(1): 156-164. doi: 10.11999/JEIT180353

|
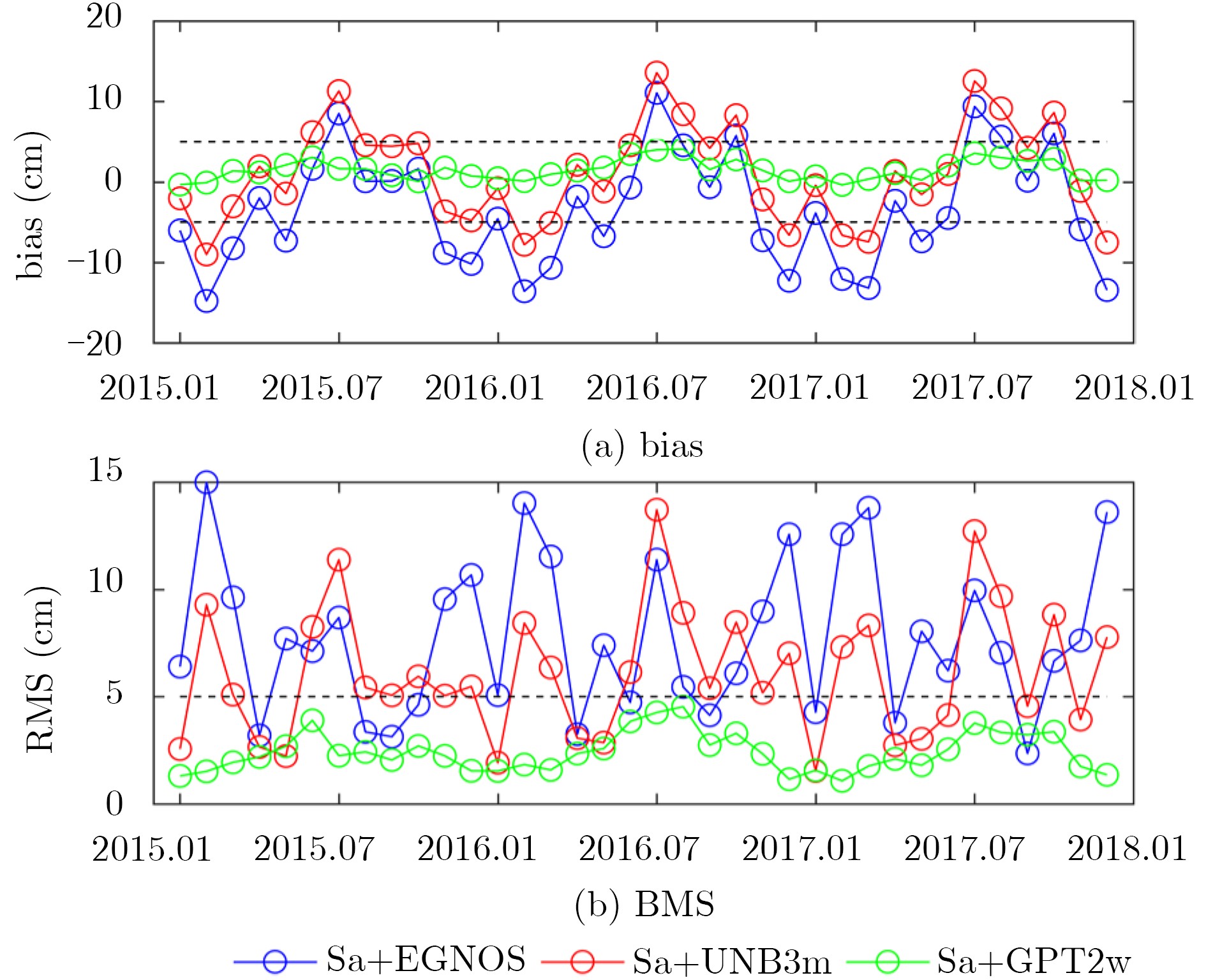
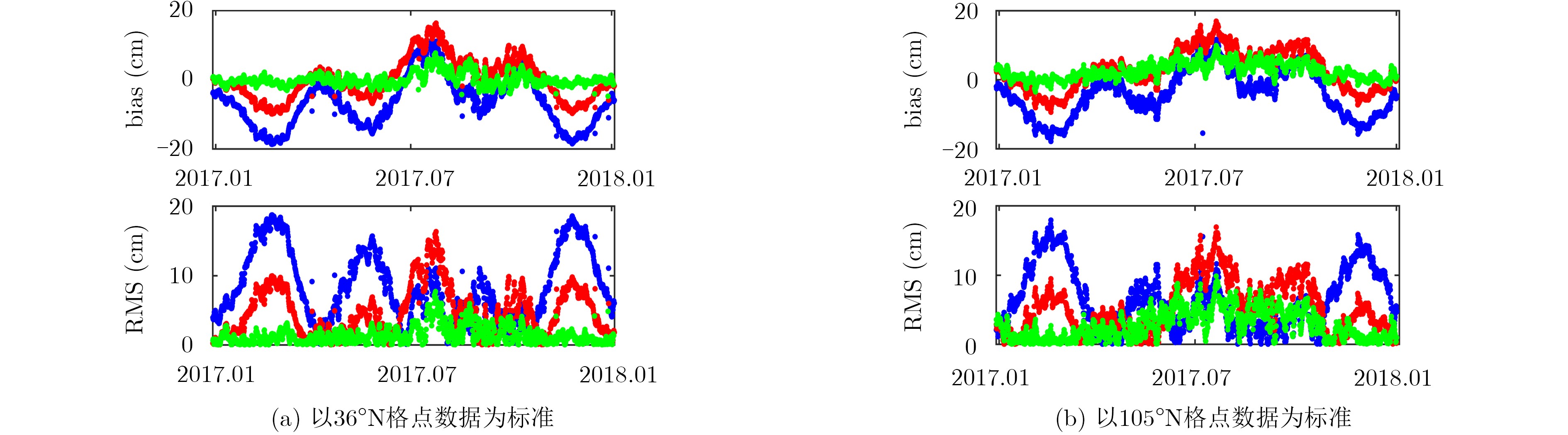
In view of the correction for tropospheric delay is limited by the shortage of sounding data, which leads to the problem that the low correction efficiency, this paper proposes a model named Sa+GPT2w, combining Saastamoinen model with GPT2w model. In this paper, the real-time correction for Zenith Tropospheric Delay (ZTD) over China is realized by using the high-precision meteorological values provided by the GPT2w model, and the results are verified by the measured data. Taking the ZTD in 2015-2017 of International GNSS Service(IGS) as a reference, the accuracy of the Sa+GPT2w model (bias: 1.661 cm, RMS: 4.711 cm) rises by 50.5%, 41.9% and 37.1%, respectively, relative to the Sa+EGNOS, Sa+UNB3m and the Hop+GPT2w models. Moreover, using the ZTD from Global Geodetic Observing System (GGOS) in 2017 as a standard, the Sa+GPT2w model (bias: 1.551 cm, RMS: 4.859 cm) improves the accuracy by 49.5%, 38.5% and 46.8% relative to other three models, respectively. Finally, this paper analyzes the temporal and spatial distribution characteristics of the bias and RMS of the above three models. The results provide a significant reference for the effectiveness of correction for ZTD by using different meteorological models in the research of navigation and atmospheric refraction over China.

|
赵静旸, 宋淑丽, 陈钦明, 等. 基于垂直剖面函数式的全球对流层天顶延迟模型的建立[J]. 地球物理学报, 2014, 57(10): 3140–3153. doi: 10.6038/cjg20141005
ZHAO Jingyang, SONG Shuli, CHEN Qinming, et al. Establishment of a new global model for zenith tropospheric delay based on functional expression for its vertical profile[J]. Chinese Journal of Geophysics, 2014, 57(10): 3140–3153. doi: 10.6038/cjg20141005
|
|
姚宜斌, 何畅勇, 张豹, 等. 一种新的全球对流层天顶延迟模型GZTD[J]. 地球物理学报, 2013, 56(7): 2218–2227. doi: 10.6038/cjg20130709
YAO Yibin, HE Changyong, ZHANG Bao, et al. A new global zenith tropospheric delay model GZTD[J]. Chinese Journal of Geophysics, 2013, 56(7): 2218–2227. doi: 10.6038/cjg20130709
|
|
HOPFIELD H S. Troposphere effect on electromagnetic measured range: Prediction from surface weather data[J]. Radio Science, 1971, 6(3): 357–367. doi: 10.1029/RS006i003p00357
|
|
SAASTAMOINEN J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites[J]. Use of Artificial Satellites for Geodesy, 1972, 15(6): 247–251. doi: 10.1029/GM015p0247
|
|
杨徉, 喻国荣, 潘树国, 等. 一种综合的对流层延迟模型算法[J]. 东南大学学报(自然科学版), 2013, 43(S2): 418–422. doi: 10.3969/j.issn.1001-0505.2013.S2.043
YANG Yang, YU Guorong, PAN Shuguo, et al. A comprehensive algorithm using fusion of tropospheric delay models[J]. Journal of Southeast University(Natural Science Edition)
|
|
姚宜斌, 张豹, 严凤, 等. 两种精化的对流层延迟改正模型[J]. 地球物理学报, 2015, 58(5): 1492–1501. doi: 10.6038/cjg20150503
YAO Yibin, ZHANG Bao, YAN Feng, et al. Two new sophisticated models for tropospheric delay corrections[J]. Chinese Journal of Geophysics, 2015, 58(5): 1492–1501. doi: 10.6038/cjg20150503
|
|
刘继业, 陈西宏, 刘赞. 对流层散射双向时间比对中对流层斜延迟实时估计[J]. 电子与信息学报, 2018, 40(3): 587–593. doi: 10.11999/JEIT170581
LIU Jiye, CHEN Xihong, and LIU Zan. Real-time estimation of tropospheric slant delay in two-way troposphere time transfer[J]. Journal of Electronics &Information Technology, 2018, 40(3): 587–593. doi: 10.11999/JEIT170581
|
|
滑中豪, 柳林涛, 梁星辉. GPT2w模型检验以及对流层模型的参数互融[J]. 武汉大学学报:信息科学版, 2017, 42(10): 1468–1473. doi: 10.13203/j.whugis20150758
HUA Zhonghao, LIU Lintao, and LIANG Xinghui. An assessment of GPT2w model and fusion of a troposphere model with in situ data[J]. Geomatics and Information Science of Wuhan University, 2017, 42(10): 1468–1473. doi: 10.13203/j.whugis20150758
|
|
施宏凯, 何秀凤, 王俊杰. 全球气压气温模型在中国地区的精度分析[J]. 大地测量与地球动力学, 2017, 37(8): 841–844. doi: 10.14075/j.jgg.2017.08.014
SHI Hongkai, HE Xiufeng, and WANG Junjie. Accuracy analyses of global pressure and temperature model in China[J]. Journal of Geodesy and Geodynamics, 2017, 37(8): 841–844. doi: 10.14075/j.jgg.2017.08.014
|
|
LAGLER K, SCHINDELEGGER M, and NILSSON T. GPT2: Empirical slant delay model for radio space geodetic tech-niques[J]. Geophysical Research Letters, 2013, 40(6): 1069–1073. doi: 10.1002/grl.50288
|
|
BÖHM J, MÖLLER G, SCHINDELEGGER M, et al. Development of an improved empirical model for slant delays in the troposphere (GPT2w)[J]. GPS Solutions, 2015, 19(3): 433–441. doi: 10.1007/s10291-014-0403-7
|
|
BRAUN J, ROCKEN C, and WARE R. Validation of line-of-sight water vapor measurements with GPS[J]. Radio Science, 2001, 36(3): 459–472. doi: 10.1029/2000RS002353
|
|
姚宜斌, 徐星宇, 胡羽丰. GGOS对流层延迟产品精度分析及在PPP中的应用[J]. 测绘学报, 2017, 46(3): 278–287. doi: 10.11947/j.AGCS.2017.20160383
YAO Yibin, XU Xingyu, and HU Yufeng. Precision analysis of GGOS tropospheric delay product and its application in PPP[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(3): 278–287. doi: 10.11947/j.AGCS.2017.20160383
|
|
ASKNE J and NORDIUS H. Estimation of tropospheric delay for microwaves from surface weather data[J]. Radio Science, 1987, 22(3): 379–386. doi: 10.1029/RS022i003p00379
|
|
NIGEL P and ALAN D. Assessment of EGNOS tropospheric correction model[J]. Journal of Navigation, 1999, 54(1): 37–55.
|
|
LEANDRO R F, LANGLEY R B, and SANTOS M C. UNB3m_pack: A neutral atmosphere delay package for radiometric space techniques[J]. GPS Solutions, 2008, 12(1): 65–70. doi: 10.1007/s10291-007-0077-5
|
|
QU Weijing, ZHU Wenyao, SONG Shuli, et al. Evaluation of the precision of three tropospheric delay correction models[J]. Chinese Astronomy and Astrophysics, 2008, 32(4): 429–438. doi: 10.1016/j.chinastron.2008.10.010
|
|
中国天气网. 2016年中国十大天气气候事件评选结果[OL]. http://news.weather.com.cn/2016/12/2638475.shtml. 2016.12.
|
Figures(4) / Tables(4)



 DownLoad:
DownLoad: