| Citation: | Ziyao ZHU, Shuping HAN, Zhengdong GUO, Jianbo LIU. Single Beacon Location Algorithm Based on Nonlinear Fading Filter Under Multiplicative Noise Background[J]. Journal of Electronics & Information Technology, 2019, 41(1): 165-171. doi: 10.11999/JEIT180239

|
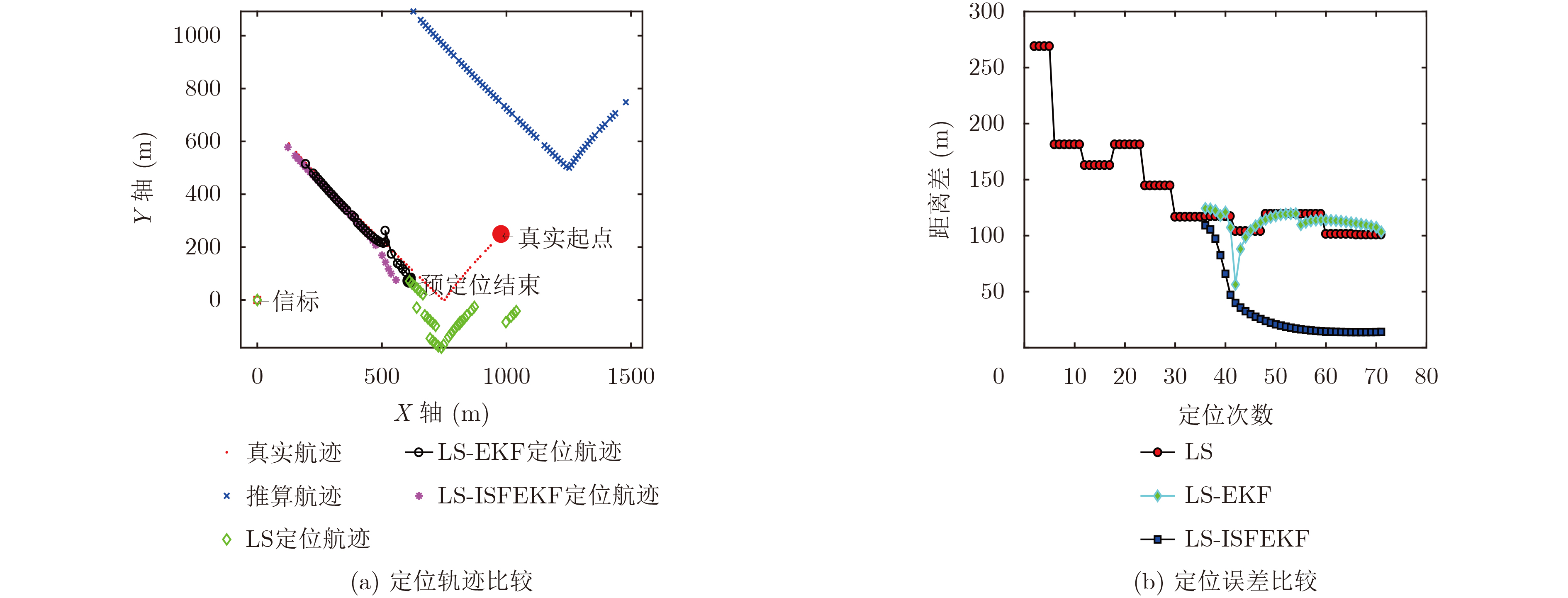
Single beacon location algorithm based on additive noise model can not accurately represent the actual characteristics of distance measurement, leading to a problem of model mismatch. A two step location algorithm considering the multiplicative noise characteristics is presented, which combines least squares algorithm and nonlinear fading filter. A range error model in the background of multiplicative noise is established based on the analysis of the effective sound velocity error. The nonlinear fading filtering algorithm with single fading factor under multiplicative noise background is improved by introducing the attenuation factor which increases the track continuity. Using the least squares based pre-location process to solve the problem that the improved algorithm is sensitive to the initial value. The simulation and experimental data show that the location precision of the proposed algorithm is obviously better than the extended Kalman filtering algorithm under the additive noise background.

|
孙大军, 郑翠娥. 水声导航、定位技术发展趋势探讨[J]. 海洋技术学报, 2015, 34(3): 64–68.
SUN Dajun and ZHENG Cuie. Study on the development trend of underwater acoustic navigation and positioning technologies[J]. Journal of Ocean Technology, 2015, 34(3): 64–68.
|
|
张延顺, 郭雅静, 黄小娟, 等. 水下运载体航位推算系统初始位置确定方法[J]. 北京航空航天大学学报, 2015, 41(12): 2211–2216.
ZHANG Yanshun, GUO Yajing, HUANG Xiaojuan, et al. Method for determining initial position of dead reckoning system of underwater vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(12): 2211–2216.
|
|
FERREIRA B, MATOS A, and CRUZ N. Single beacon navigation: Localization and control of the MARES AUV[C]. IEEE Oceans Conference, Washington D.C., USA, 2010: 1–9.
|
|
SARAH E W. Decentralized single beacon acoustic navigation: Communication and navigation for underwater vehicles[D]. [Ph.D. dissertation], The Johns Hopkins University, 2010: 30–96.
|
|
王彬, 翁海娜, 梁瑾. 一种惯性/水声单应答器距离组合导航方法[J]. 海洋技术学报, 2017, 25(1): 86–90.
WANG Bin, WENG Haina, and LIANG Jin. Inertial/acoustic range integrated navigation with single transponder[J]. Journal of Chinese Inertial Technology, 2017, 25(1): 86–90.
|
|
曹俊, 郑翠娥, 孙大军, 等. 系数矩阵正定的单信标测距定位算法[J]. 电子与信息学报, 2017, 39(4): 981–988. doi: 10.11999/JEIT150483
CAO Jun, ZHENG Cuie, SUN Dajun, et al. A single beacon location algorithm with positive definite coefficient matrix[J]. Journal of Electronics &Information Technology, 2017, 39(4): 981–988. doi: 10.11999/JEIT150483
|
|
WANG Xingbo, FU Minyue, and ZHANG Huanshui. Target tracking in wireless sensor networks based on the combination of KF and MLE using distance measurements[J]. IEEE Transactions on Mobile Computing, 2012, 11(4): 567–576.
|
|
史秀纺. 复杂因素影响下的定位跟踪问题研究[D]. [博士论文], 浙江大学, 2016: 20–67.
SHI Xiufang. Research on localization and tracking under the influence of complex factors[D]. [Ph.D. dissertation], Zhejiang University, 2016: 20–67.
|
|
张征. 一类带乘性噪声非线性系统的估计算法研究[D]. [硕士论文], 中国海洋大学, 2006: 40–82.
ZHANG Zheng. Study of estimation algorithm for a class of nonlinear systems with multiplicative noise[D]. [Master dissertation], Ocean University of China, 2006: 40–82.
|
|
王炯琦, 矫媛媛, 周海银, 等. 适合处理乘性噪声估计卫星姿态的非线性迭代滤波算法[J]. 电子学报, 2011, 39(6): 1417–1422.
WANG Jiongqi, JIAO Yuanyuan, ZHOU Haiyin, et al. An iterative filter for nonlinear satellite attitude determination system with multiplicative stochastic matrix[J]. Acta Electronica Sinica, 2011, 39(6): 1417–1422.
|
|
范小军, 刘锋. 一种新的机动目标跟踪的多模型算法[J]. 电子与信息学报, 2007, 29(3): 532–535.
FAN Xiaojun and LIU Feng. A new IMM method for tracking maneuvering target[J]. Journal of Electronics &Information Technology, 2007, 29(3): 532–535.
|
|
VINCENT H T. Models, algorithms and measurement for underwater acoustic positioning[D]. [Ph.D. dissertation], University of Rhode Island, 2001: 1–5.
|
|
毛永毅, 李明远, 张宝军. 一种NLOS环境下的TOA/AOA定位算法[J]. 电子与信息学报, 2009, 31(1): 37–40.
MAO Yongyi, LI Mingyuan, and ZHANG Baojun. A TOA/ AOA location algorithm in NLOS environment[J]. Journal of Electronics &Information Technology, 2009, 31(1): 37–40.
|
|
杨元喜, 高为广. 渐消滤波原理及其理论分析[J]. 测绘科学与工程, 2007, 27(2): 1–4.
YANG Yuanxi and GAO Weiguang. Principle and theoretical analysis of fading filtering[J]. Geomatic Science and Engineering, 2007, 27(2): 1–4.
|
|
周东华, 席裕康. 非线性系统带次优渐消因子的扩展卡尔曼滤波[J]. 控制与决策, 1990, 5(5): 1–6.
ZHOU Donghua and XI Yukang. Suboptimal fading extended Kalman filtering for nonlinear systems[J]. Control &Decision, 1990, 5(5): 1–6.
|
Figures(6)



 DownLoad:
DownLoad: