| Citation: | Hui ZHI, Feiyue WANG, Ziju HUANG. Dynamic Pilot Allocation Scheme for Joint User Grouping and Alliance Game in Massive MIMO Systems[J]. Journal of Electronics & Information Technology, 2020, 42(7): 1686-1693. doi: 10.11999/5EIT190445

|
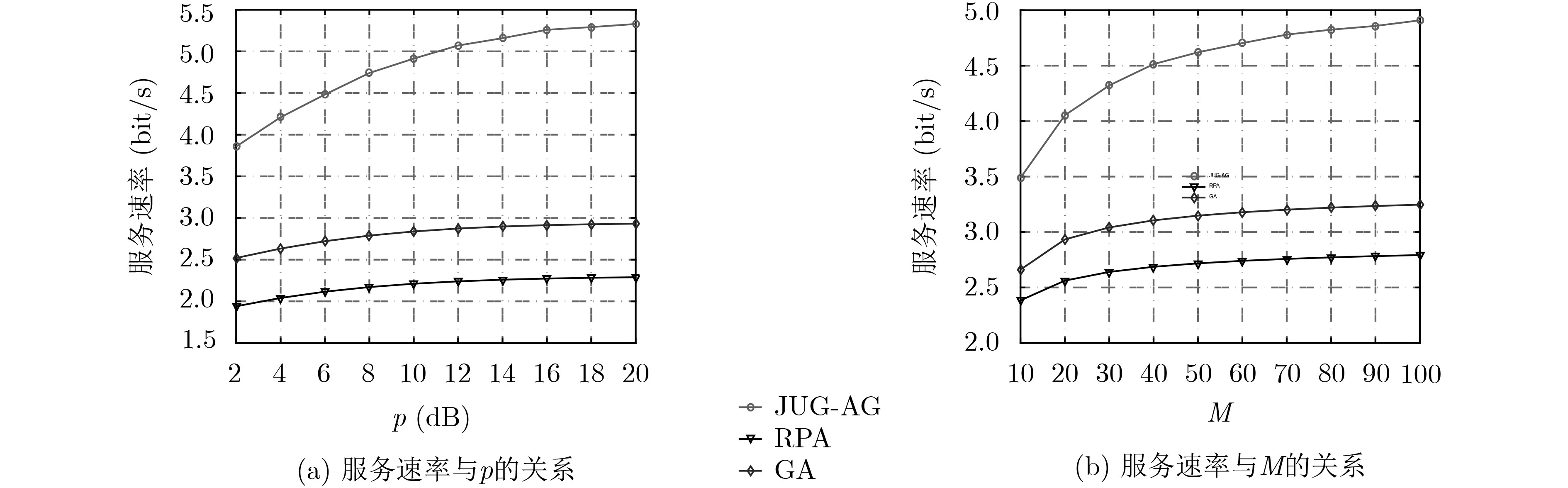
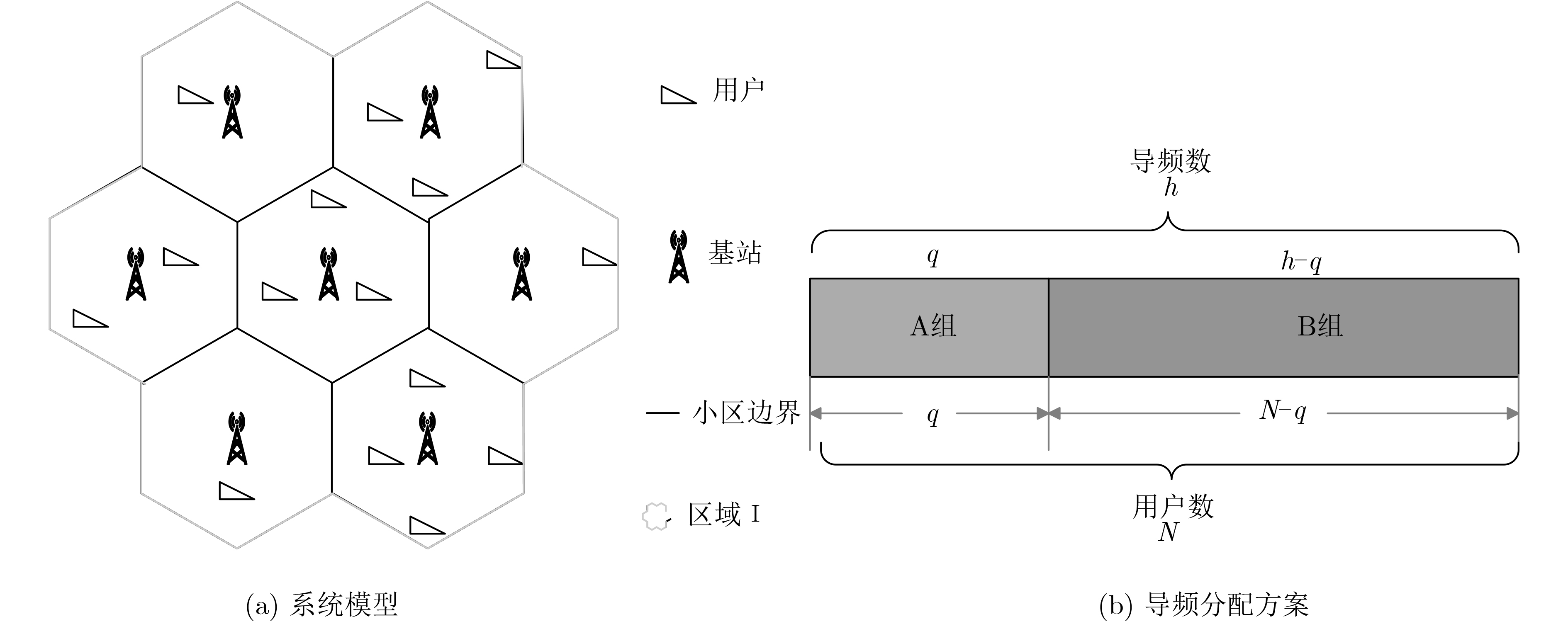
Many researches demonstrate that cell-edge users are more susceptible to pilot contamination than the cell-center users in massive MIMO systems. Therefore, this paper proposes a dynamic pilot allocation scheme called Joint User Grouping and Alliance Game (JUG-AG) to mitigate pilot contamination. According to the user signal strength, the users are divided into two groups, namely A and B. Users with weak strength of received Base Stations (BSs) signals are recorded as group A, and the remaining users are group B. The users of group A use mutually orthogonal pilots, and the users of group B reuse the remaining orthogonal pilots by means of alliance game. In the alliance game for the users of group B, users are divided into several disjoint user sub-alliances, users belonging to different sub-alliances are allocated different orthogonal pilot sequences, and users in the same sub-alliance reuse the same pilot sequence. Compared with the existing pilot allocation schemes, the proposed JUG-AG scheme is more flexible and can be used for scenarios that all users are randomly distributed. Moreover, the algorithm can obtain the overall optimal solution through cyclic searching. The simulation results demonstrate that the JUG-AG scheme can effectively reduce the average Root Mean Square Error (RMSE) of user signal detection in the uplink and improve the average service rate of users.

|
ZHANG Ruoyu, ZHAO Honglin, ZHANG Jiayan, et al. Hybrid orthogonal and non-orthogonal pilot distribution based channel estimation in massive MIMO system[J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 881–898. doi: 10.21629/JSEE.2018.05.01
|
|
KIM K, LEE J, and CHOI J. Deep learning based pilot allocation scheme (DL-PAS) for 5G massive MIMO system[J]. IEEE Communications Letters, 2018, 22(4): 828–831. doi: 10.1109/LCOMM.2018.2803054
|
|
ZHI Hui and HU Yanjun. Novel multi-cell precoding schemes for TDD massive MIMO systems[J]. Wireless Personal Communications, 2017, 97(4): 6111–6129. doi: 10.1007/s11277-017-4829-4
|
|
ZHU Xudong, WANG Zhaocheng, QIAN Chen, et al. Soft pilot reuse and multicell block diagonalization precoding for massive MIMO systems[J]. IEEE Transactions on Vehicular Technology, 2016, 65(5): 3285–3298. doi: 10.1109/TVT.2015.2445795
|
|
张进彦, 金凤, 尹礼欣. 大规模MIMO系统中基于用户分类的动态导频分配[J]. 电信科学, 2017, 33(9): 76–84. doi: 10.11959/j.issn.1000-0801.2017212
ZHANG Jinyan, JIN Feng, and YIN Lixin. Dynamic pilot assignment in massive MIMO system based on user classification[J]. Telecommunications Science, 2017, 33(9): 76–84. doi: 10.11959/j.issn.1000-0801.2017212
|
|
ZHU Xudong, WANG Zhaocheng, DAI Linglong, et al. Smart pilot assignment for massive MIMO[J]. IEEE Communications Letters, 2015, 19(9): 1644–1647. doi: 10.1109/LCOMM.2015.2409176
|
|
KU Li, FAN Jiancun, and DENG Jianguo. Low complexity pilot allocation in massive MIMO systems[C]. The 8th IEEE International Conference on Communication Software and Networks, Beijing, China, 2016: 402–406.
|
|
AKBAR N, YANG Nan, SADEGHI P, et al. Multi-cell multiuser massive MIMO networks: User capacity analysis and pilot design[J]. IEEE Transactions on Communications, 2016, 64(12): 5064–5077. doi: 10.1109/TCOMM.2016.2614674
|
|
JING Xiaorong, LI Mengwan, LIU Hongqing, et al. Superimposed pilot optimization design and channel estimation for multiuser massive MIMO systems[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 11818–11832. doi: 10.1109/TVT.2018.2875480
|
|
CASTAÑEDA GARCIA M H and LUO Jian. Time-shifted pilots multiplexed with uplink data and unequal power allocation[C]. 2018 IEEE Wireless Communications and Networking Conference, Barcelona, Spain, 2018: 1–6.
|
|
GAO Hongyuan, SU Yumeng, ZHANG Shibo, et al. Antenna selection and power allocation design for 5G massive MIMO uplink networks[J]. China Communications, 2019, 16(4): 1–15.
|
|
GUO Kaifeng, GUO Yan, and ASCHEID G. Energy-efficient uplink power allocation in multi-cell mu-massive-MIMO systems[C]. The 21th European Wireless Conference, Budapest, Hungary, 2015: 1–5.
|
|
AHMADI H, FARHANG A, MARCHETTI N, et al. A game theoretic approach for pilot contamination avoidance in massive MIMO[J]. IEEE Wireless Communications Letters, 2016, 5(1): 12–15. doi: 10.1109/LWC.2015.2487261
|
|
MOCHAOURAB R, BJÖRNSON E, and BENGTSSON M. Adaptive pilot clustering in heterogeneous massive MIMO networks[J]. IEEE Transactions on Wireless Communications, 2016, 15(8): 5555–5568. doi: 10.1109/TWC.2016.2561289
|
|
BOGOMOLNAIA A and JACKSON M O. The stability of hedonic coalition structures[J]. Games and Economic Behavior, 2002, 38(2): 201–230. doi: 10.1006/game.2001.0877
|
|
OSBORNE M J and RUBINSTEIN A. A Course in Game Theory[M]. Cambridge, USA: MIT Press, 1994: 255–298.
|
Figures(4) / Tables(2)



 DownLoad:
DownLoad: