

Energy-Efficient Trajectory Planning and Resource Optimization for UAV Relay Communications over Hybrid RF/FSO Links
-
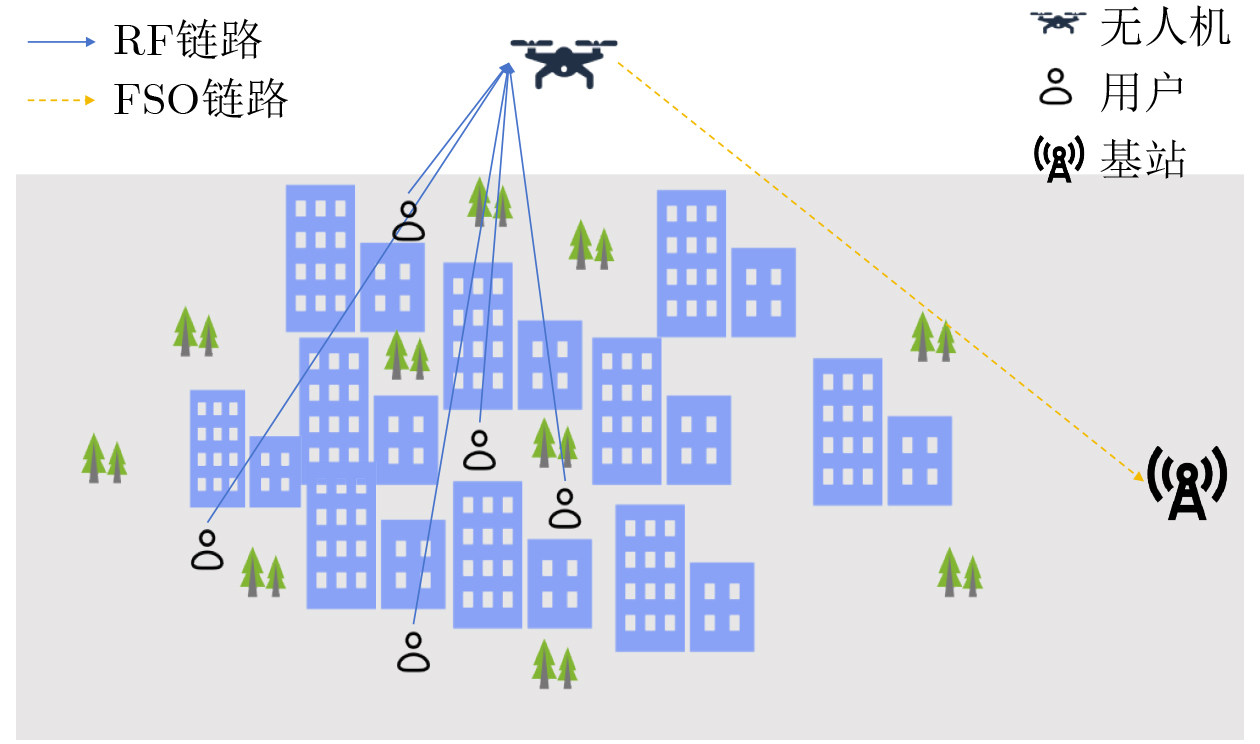
摘要: 伴随未来低空业务的爆发式增长,有限射频(RF)频谱资源成为无人机(UAV)中继通信系统性能提升的关键瓶颈。为此,该文引入自由空间光(FSO)通信,提出一种基于非正交多址接入(NOMA)的混合RF/FSO UAV中继通信方法。针对FSO链路易受遮挡导致通信不稳定的问题,在UAV中继端引入缓存机制,有效解耦RF接入与FSO回传过程。进一步地,针对低空空域环境障碍物密集、遮挡频发等复杂特征,综合地考虑用户功率约束、UAV航迹避障、速度与加速度等飞行动力学约束,提出面向能效优化的联合功率分配与避障航迹规划算法,在满足飞行动力学约束和避障安全的同时,有效地提升了单位能耗下的系统吞吐性能。仿真结果表明,所提方法在系统能效方面显著优于基准方法。Abstract:
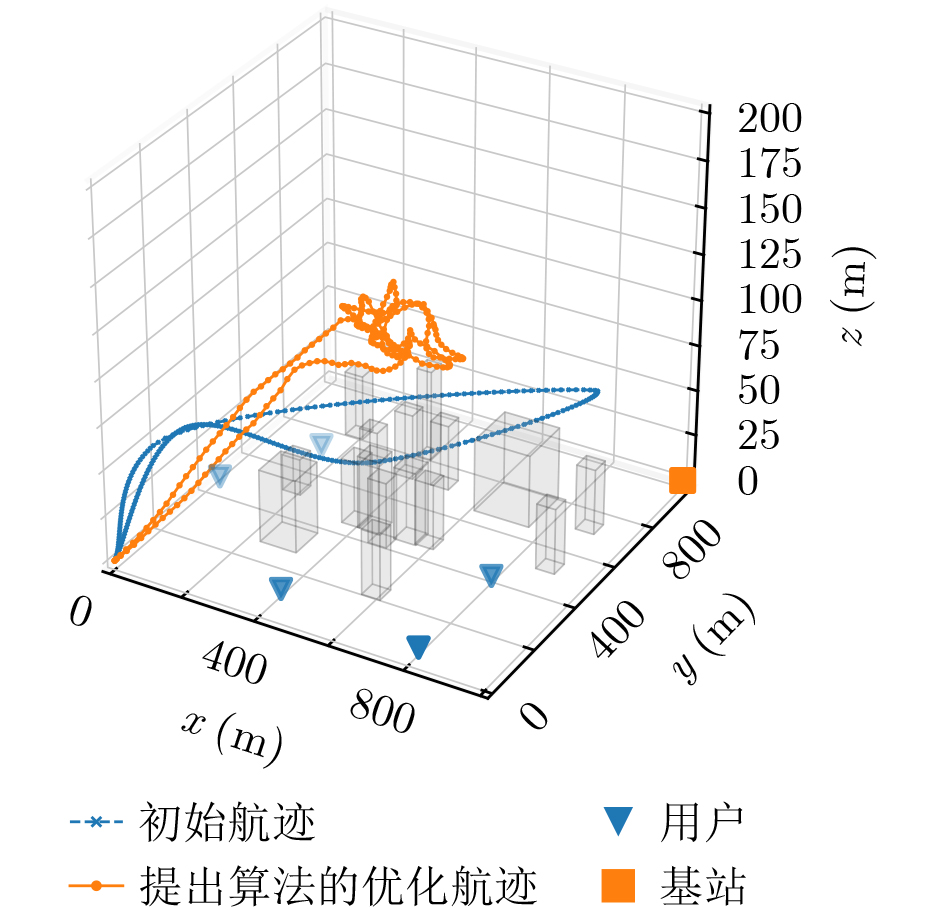
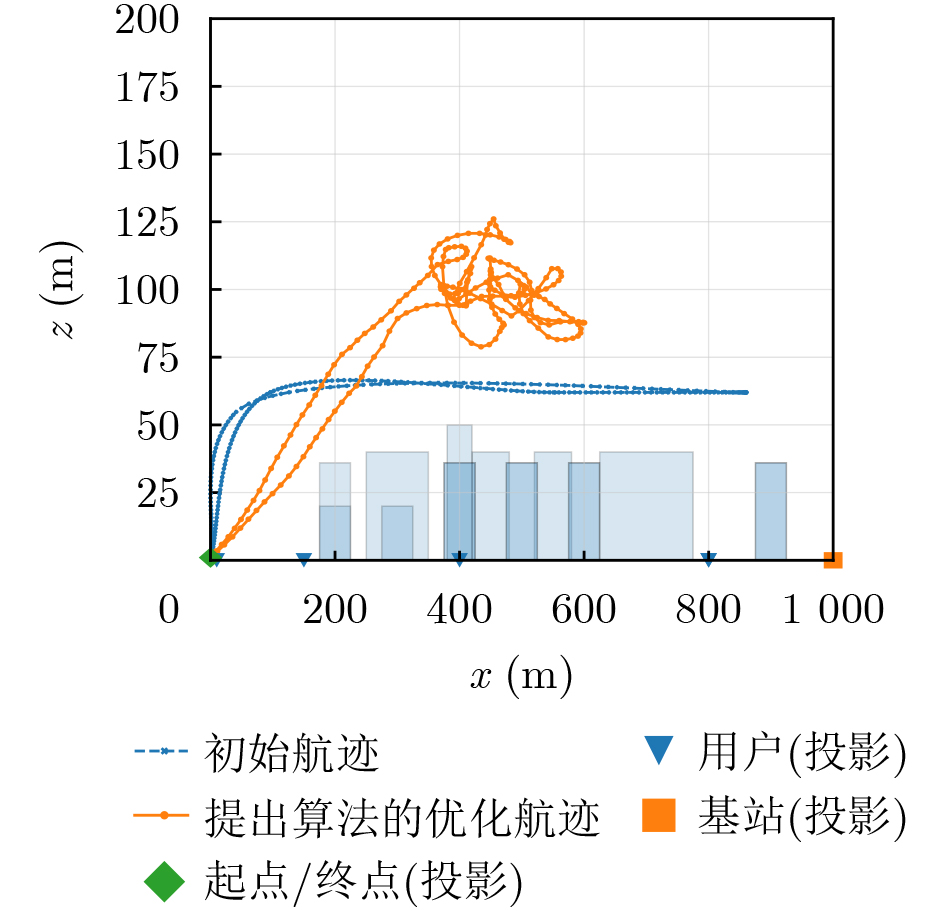
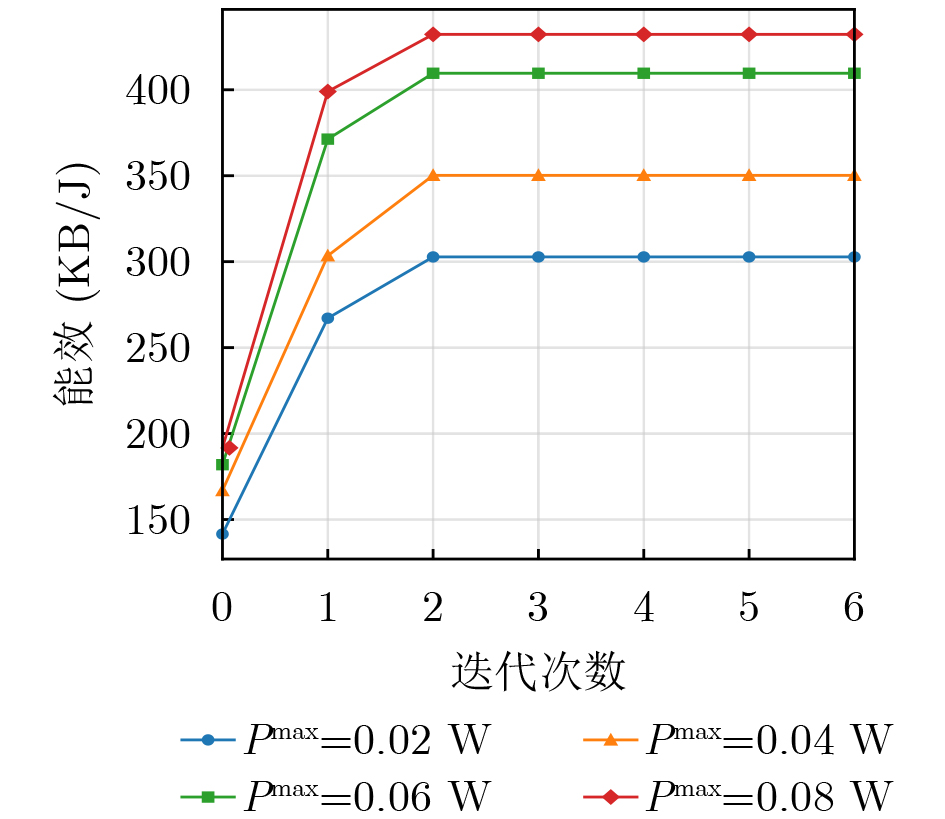
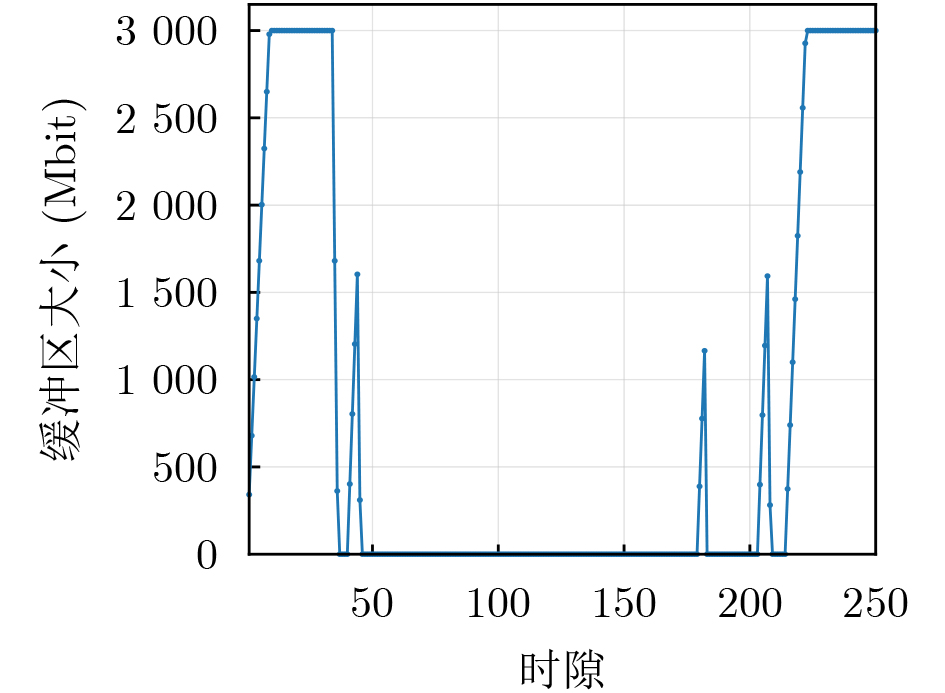
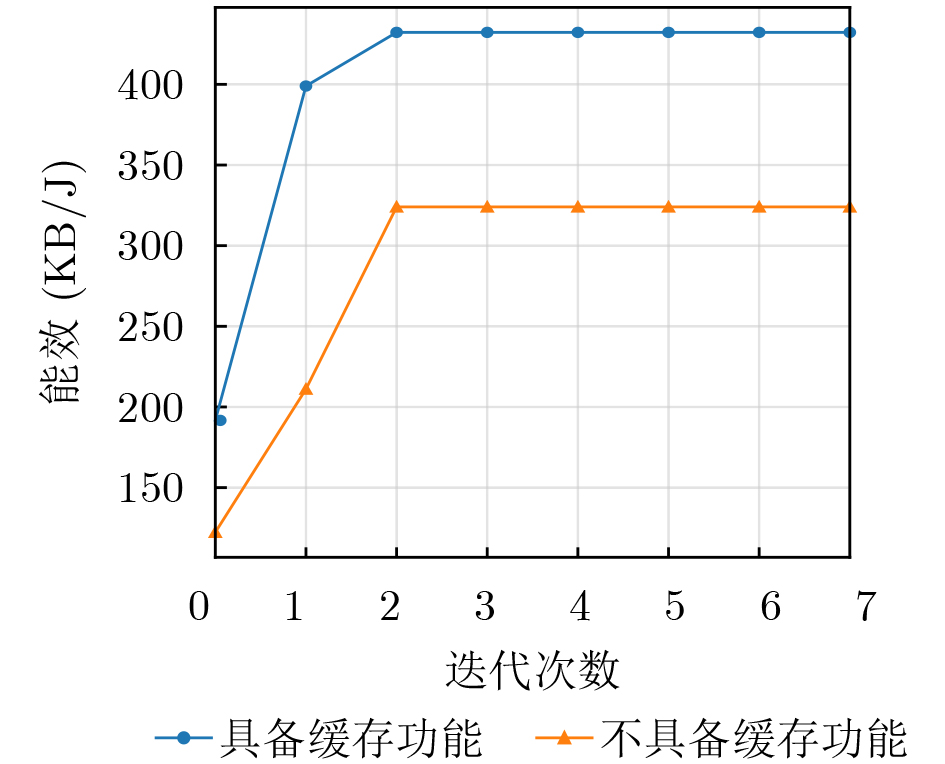
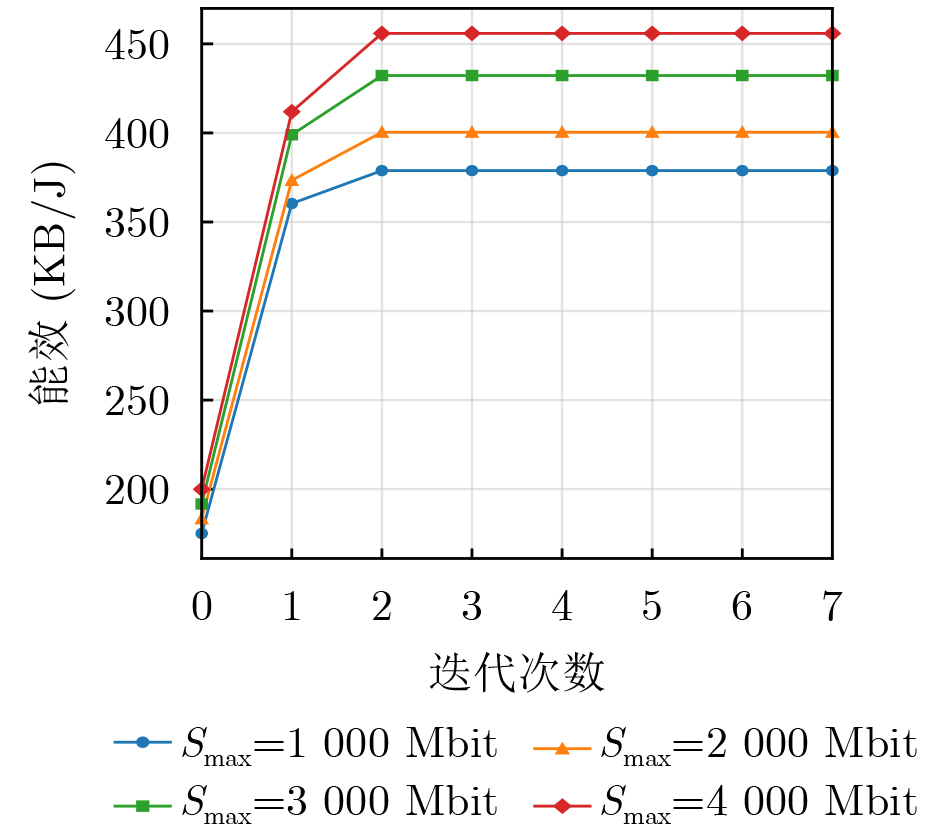
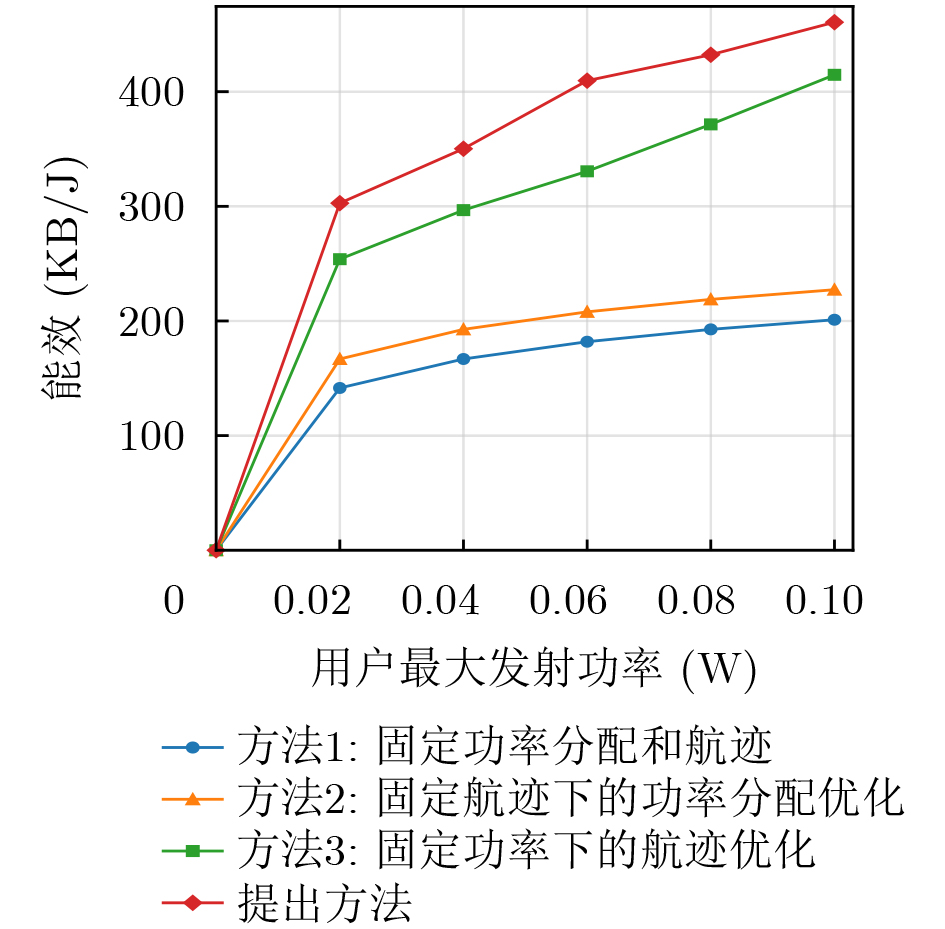
Objective In low-altitude communication networks, hybrid Radio Frequency/Free-Space Optical (RF/FSO) Unmanned Aerial Vehicle (UAV) relaying can ease RF spectrum congestion and improve uplink data aggregation. However, in obstacle-rich urban environments, FSO backhaul links are vulnerable to blockage and intermittent outages. This creates a severe mismatch between the RF access-link rate and the FSO backhaul-link rate. UAV trajectory planning is also constrained by obstacle avoidance and flight dynamics. To address these coupled issues, this paper investigates an energy-efficiency maximization problem. Multiuser Non-Orthogonal Multiple Access (NOMA)-based RF access and the Three-Dimensional (3D) obstacle-avoiding UAV trajectory are jointly optimized, and buffer-assisted RF/FSO rate decoupling is incorporated. Methods A time-slotted UAV relaying model is considered, in which multiple ground users upload data to the UAV through an RF link using NOMA. The UAV decodes superposed signals by Successive Interference Cancellation (SIC), and the decoding order in each slot is determined according to the received-power ranking. The successfully received data are then forwarded to a Base Station (BS) through an FSO backhaul link. Urban blockage is modeled using 3D geometric obstacles. A visibility test is used to determine whether each relevant link is in Line-Of-Sight (LOS) or Non-Line-Of-Sight (NLOS), which captures the spatially correlated and time-varying RF access-link rate and intermittent FSO backhaul capacity. To suppress blockage-induced rate mismatch between the RF access link and the FSO backhaul link, an onboard finite-capacity buffer is deployed at the UAV. In each slot, the forwardable data amount is jointly limited by the instantaneous FSO backhaul capacity and the data available in the buffer, and buffer-capacity constraints are imposed to prevent overflow. System energy efficiency is defined as the ratio of cumulative data successfully delivered to the BS over the mission horizon to UAV propulsion energy consumption. Propulsion power is modeled as a function of UAV velocity and acceleration to reflect the effect of flight dynamics. Under 3D flight-region boundaries, prescribed start and end locations, discrete-time kinematic equations, maximum velocity and acceleration limits, and obstacle collision-avoidance constraints, a non-convex optimization problem is formulated. The decision variables are cross-slot multiuser transmit powers and the 3D UAV trajectory. An alternating optimization framework is then developed. For a fixed trajectory, propulsion energy is fixed, so maximizing energy efficiency is equivalent to increasing end-to-end successfully forwarded data. This yields a power-optimization subproblem. Because of NOMA coupling and logarithmic rate expressions, this subproblem remains non-convex and is solved by Successive Convex Approximation (SCA). For fixed transmit powers, Particle Swarm Optimization (PSO) is used to search candidate 3D trajectories in continuous space. To ensure feasibility under strict dynamics and safety constraints, Quadratic Programming (QP) projection is used to enforce velocity and acceleration constraints. Collision checks are performed for trajectory waypoints and inter-slot line segments to ensure obstacle-free flight. These two optimization procedures are performed alternately. The resulting joint design satisfies flight-dynamics feasibility and collision-avoidance requirements and improves energy efficiency. Results and Discussion Simulations are conducted in an urban airspace with multiple users, a BS, and dense 3D obstacles. Blockage causes frequent LOS/NLOS switching as the UAV moves. Fig. 2 and3 compare the 3D trajectory and its planar projection, respectively. Compared with the initial trajectory, the optimized trajectory shows clear detours and necessary altitude adjustments. It achieves collision-free flight while satisfying velocity and acceleration constraints, thereby verifying the feasibility and safety of the proposed trajectory planning method.Fig. 4 shows the convergence of energy efficiency under different user transmit-power budgets. The proposed alternating optimization generally stabilizes within a small number of outer iterations. The converged energy efficiency increases with the power budget, indicating synergy between power control and trajectory adaptation.Fig. 5 shows buffer evolution over time. The buffer gradually accumulates data when the backhaul is blocked or experiences strong fading. It is quickly drained when the UAV enters regions with LOS backhaul and improved FSO capacity. To quantify buffering gain,Fig. 6 compares system energy efficiency between the proposed buffering mechanism and the no-buffer scheme. The proposed mechanism enables store-and-forward temporal smoothing during backhaul interruptions and improves system energy efficiency.Fig. 7 shows energy-efficiency convergence under different buffer capacities. As buffer capacity increases, the converged energy-efficiency level improves. A larger buffer enhances the UAV’s ability to temporarily store incoming data and reduces data accumulation and transmission blockage when RF access-link and FSO backhaul-link rates are mismatched or the backhaul link is constrained. Figure 8 compares four benchmark schemes, namely a non-optimized baseline, a power-optimization scheme, a trajectory-optimization scheme, and the proposed joint power-and-trajectory optimization scheme. The coordinated design of power allocation and obstacle-avoiding trajectory improves end-to-end energy efficiency. Trajectory optimization also plays a more dominant role under blockage-limited conditions.Conclusion This paper investigates a hybrid RF/FSO UAV relaying scheme with NOMA and an onboard buffering mechanism for low-altitude urban communication. Given dense obstacles, frequent blockage, FSO-link susceptibility, and strict flight-dynamics constraints, an energy-efficiency maximization problem is formulated for the joint optimization of multiuser NOMA power allocation and UAV trajectory. An SCA-based power-allocation method and an obstacle-avoiding trajectory design that combines PSO with QP projection are developed. The obtained trajectory satisfies flight-dynamics feasibility and collision-avoidance requirements and improves throughput per unit propulsion energy. Simulation results show that the planned trajectory can avoid obstacles, and that the onboard buffer provides an effective cushion between RF access and FSO backhaul to mitigate rate mismatch. The proposed method consistently outperforms benchmark schemes in energy efficiency. Trajectory optimization is also shown to be generally more effective than power allocation in improving overall system performance. -
1 基于SCA 的用户功率优化分配算法
初始化功率$ P_{j}^{\left(0\right)}\left[n\right],j=1,2,\cdots ,M,n=1,2,\cdots ,{N}_{T} $,设置最大
迭代次数$ {L}_{1} $和收敛阈值$ \xi $,令$ {l}_{1}=0 $;While $ {l}_{1} \lt {L}_{1} $ and $ \displaystyle\sum \limits_{j=1}^{M}\displaystyle\sum \limits_{n=1}^{{N}_{T}}{\left(P_{j}^{\left({l}_{1}+1\right)}\left[n\right]-P_{j}^{\left({l}_{1}\right)}\left[n\right]\right)}^{2}\leq \xi $ do 根据功率$ P_{j}^{\left({l}_{1}\right)}\left[n\right],j=1,2,\cdots ,M,n=1,2,\cdots ,{N}_{T} $,利用式(31)
更新$ R_{m}^{\left({l}_{1}\right)} $;求解式(32)对应的凸优化问题,获得最优功率值,表示为$ P_{m}^{*}\left[n\right] $; 更新$ P_{j}^{\left({l}_{1}+1\right)}\left[n\right]=P_{m}^{*}\left[n\right] $; $ {l}_{1}={l}_{1}+1 $; End While 输出最优用户功率$ {\widehat{P}}_{m}\left[n\right]=P_{j}^{\left({l}_{1}+1\right)}\left[n\right] $  下载: 导出CSV
下载: 导出CSV
2 融合PSO和QP投影的UAV避障航迹规划算法
初始化系统参数$ {V}_{\max } $, $ {\beta }_{\mathrm{LOS}} $, $ {A}_{\max } $, $ \lambda_{\boldsymbol{v}} $, $ \lambda_{\boldsymbol{a}} $, $ {\omega }_{\text{near}} $, $ {\omega }_{\mathrm{hit}} $, $ {\omega }_{\mathrm{risk}} $,
$ {S}_{\max } $等,初始化算法参数$ {N}_{\text{PSO}} $, $ {L}_{2} $, $ {\omega }_{0} $, $ {c}_{1} $, $ {c}_{2} $, $ {r}_{1} $, $ {r}_{2} $, $ {d}_{\text{safe}} $,
$ {d}_{\text{risk}} $,随机生成粒子初始位置$ {\mathbf{q}}_{0,p} $及速度$ {\mathbf{v}}_{0,p} $,初始化个体最优
解$ \mathbf{q}_{0,p}^{*} $与群体最优解$ \mathbf{q}_{0}^{*} $,将最优系统能效和航迹分别表示为
$ \eta _{\text{EE}}^{*} $和$ {\mathbf{q}}^{*} $;While $ {l}_{2} \lt {L}_{2} $ do 按照式(36)更新粒子速度$ {\mathbf{v}}_{{{l}_{2}},p} $和位置$ {\mathbf{q}}_{{{l}_{2}},p} $; 计算适应度$ f\left({\mathbf{q}}_{{{l}_{2}},p}\right) $,计算每个粒子的个体最优解$ \mathbf{q}_{{l}_{2},p}^{*} $和群
体最优解$ \mathbf{q}_{{l}_{2}}^{*} $;选择适应度最优的前$ {N}_{\text{OPT}} $个粒子,执行QP投影得到相应的
投影航迹$ {\widehat{\mathbf{q}}}_{{{l}_{2}},p} $;选择$ {N}_{\text{OPT}} $个投影航迹中能效最大的情况作为最优解,更新
$ \eta _{\text{EE}}^{*} $和$ {\mathbf{q}}^{*} $;End While
下载: 导出CSV
3 用户发射功率和UAV三维轨迹联合优化算法
设置初始航迹$ {\mathbf{q}}_{\text{Initial}} $,设置最大迭代次数$ {L}_{3} $,初始化最优系统
能效$ \eta _{\text{EE}}^{*}=0 $和最优航迹$ {\mathbf{q}}^{*}={\mathbf{q}}_{\text{Initial}} $,令$ {l}_{3}=1 $;While $ {l}_{3} \lt {L}_{3} $ do 将航迹设置为$ {\mathbf{q}}^{*} $,执行算法1,输出功率优化分配结果
$ {\widehat{P}}_{m}\left[n\right] $,并更新$ \eta _{\text{EE}}^{*} $;将功率分配设置为$ {\widehat{P}}_{m}\left[n\right] $,执行算法2,输出航迹规划结果
$ {\mathbf{q}}^{*} $和最优系统能效$ \eta _{\text{EE}}^{*} $;更新$ {l}_{3}={l}_{3}+1 $; End While 得到最终的$ {\mathbf{q}}^{*} $,$ {\widehat{P}}_{m}\left[n\right] $和$ \eta _{\text{EE}}^{*} $
下载: 导出CSV
表 1 仿真参数
参数名 参数值 参数名 参数值 RF信道带宽$ {B}_{\mathrm{RF}} $ 50 MHz 无人机最大加速度$ {A}_{\max } $ 5 $ {\text{m/s}}^{2} $ 旋翼剖面功率$ {P}_{0} $ 79.86 W 无人机最大速度$ {V}_{\max } $ 18 $ \text{m/s} $ 悬停诱导功率$ {P}_{1} $ 88.63 W RF信道噪声方差$ {\sigma }^{2} $ $ {10}^{-11} $ W 旋翼叶尖速度$ {U}_{\mathrm{tip}} $ 120 $ \text{m/s} $ 用户的最大发射功率$ {P}^{\max } $ 0.08 W 悬停诱导速度$ {v}_{0} $ 4.03 $ \text{m/s} $ FSO信道衰减因子$ {\alpha }_{w} $ 0.43 dB/km 机身阻力系数$ {d}_{0} $ 0.6 折射率结构参数$ C_{n}^{2} $ $ 3.94\times {10}^{-15}\;{\text{m}}^{-2/3} $ 空气密度$ \rho $ 1.225 $ {\text{kg/m}}^{3} $ 光波长$ \lambda $ 1550 nm旋翼盘面面积比$ {s}_{\text{h}} $ 0.05 光束腰半径$ {w}_{0} $ 0.25 mm 单个旋翼的盘面面积$ {A}_{\text{ar}} $ 0.503$ {\text{m}}^{2} $ 光斑中心的偏移距离$ u $ 0.02 m UAV最大缓存空间$ {S}_{\max } $ 3000 Mbit额外信号衰减因子$ \kappa $ 0.01 UAV距离障碍物的安全距离$ {d}_{\mathrm{safe}} $ 2 m FSO信道带宽$ {B}_{\mathrm{US}} $ 100 MHz 单位距离处的平均功率增益$ {\beta }_{1} $ –40 dB FSO信道噪声方差$ \sigma _{\mathrm{U}}^{2} $ $ {10}^{-13} $ W 视距条件下的路径损耗系数$ \alpha _{m}^{{\mathrm{LoS}}} $ 2 UAV发射功率$ {P}_{\mathrm{FSO}} $ 0.3 W 非视距条件下的路径损耗系数$ \alpha _{m}^{{\mathrm{NLoS}}} $ 3 光电转换系数$ \eta $ 0.6
下载: 导出CSV
-
[1] 裴二荣, 娄宇涵, 李永刚, 等. 一种面向多任务的无人机辅助的通信网络资源分配与轨迹优化研究[J]. 电子与信息学报, 2024, 46(7): 2748–2756. doi: 10.11999/JEIT230974.PEI Errong, LOU Yuhan, LI Yonggang, et al. Research on resource allocation and trajectory optimization of a multitask unmanned aerial vehicles assisted communication network[J]. Journal of Electronics & Information Technology, 2024, 46(7): 2748–2756. doi: 10.11999/JEIT230974. [2] WEI Qing, CHEN Yingyang, JIA Ziye, et al. Energy-efficient caching and user selection for resource-limited SAGINs in emergency communications[J]. IEEE Transactions on Communications, 2025, 73(6): 4121–4136. doi: 10.1109/TCOMM.2024.3511958. [3] LIU Yongce, WU Ziyang, and SONG Pengcheng. Online trajectory optimization for UAV-assisted hybrid FSO/RF network with QoS-guarantee[J]. IEEE Communications Letters, 2023, 27(5): 1357–1361. doi: 10.1109/LCOMM.2023.3252725. [4] 李斌, 蔡海晨, 赵传信, 等. 基于计算重用的无人机辅助边缘计算系统能耗优化[J]. 电子与信息学报, 2024, 46(7): 2740–2747. doi: 10.11999/JEIT231061.LI Bin, CAI Haichen, ZHAO Chuanxin, et al. Energy optimization for computing reuse in unmanned aerial vehicle-assisted edge computing systems[J]. Journal of Electronics & Information Technology, 2024, 46(7): 2740–2747. doi: 10.11999/JEIT231061. [5] ZHANG Yalin, GAO Xiaozheng, YUAN Hang, et al. Joint UAV trajectory and power allocation with hybrid FSO/RF for secure space–air–ground communications[J]. IEEE Internet of Things Journal, 2024, 11(19): 31407–31421. doi: 10.1109/JIOT.2024.3419264. [6] FENG Simeng, LI Nian, LIU Kai, et al. A cross Q-learning assisted resource allocation for user-centric optical wireless communication networks[J]. IEEE Transactions on Green Communications and Networking, 2025, 9(4): 2264–2278. doi: 10.1109/TGCN.2025.3553202. [7] GUO Wenjng, ZHAN Yueying, TSIFTSIS T A, et al. Performance and channel modeling optimization for hovering UAV-assisted FSO links[J]. Journal of Lightwave Technology, 2022, 40(15): 4999–5012. doi: 10.1109/JLT.2022.3176352. [8] ZHANG Jiliang, ZHANG Li, and PAN Gaofeng. Outage performance for NOMA-based FSO-RF systems with a dual energy harvesting mode[J]. IEEE Internet of Things Journal, 2023, 10(18): 16076–16086. doi: 10.1109/JIOT.2023.3267136. [9] JANJI S, SAMORZEWSKI A, WASILEWSKA M, et al. On the placement and sustainability of drone FSO backhaul relays[J]. IEEE Wireless Communications Letters, 2022, 11(8): 1723–1727. doi: 10.1109/LWC.2022.3178546. [10] HASSAN H, ALTHUNIBAT S, AL-MBAIDEEN A, et al. A survey on hybrid free space optical and radio frequency systems: Classification, progress, observations, and challenges[J]. IEEE Access, 2025, 13: 63994–64060. doi: 10.1109/ACCESS.2025.3558500. [11] KONG Huaicong, LIN Min, ZHU Weiping, et al. Multiuser scheduling for asymmetric FSO/RF links in satellite-UAV-terrestrial networks[J]. IEEE Wireless Communications Letters, 2020, 9(8): 1235–1239. doi: 10.1109/LWC.2020.2986750. [12] LI Xiaoyan, LIU Yitong, GUO Shaoai, et al. Robust joint optimization for efficient and reliable FSO/RF satellite-UAV-terrestrial networks with random fading and imperfect channel information[J]. IEEE Internet of Things Journal, 2025, 12(21): 45307–45324. doi: 10.1109/JIOT.2025.3600439. [13] XU Fang, DUO Bin, XIE Yiyuan, et al. Multi-UAV assisted mixed FSO/RF communication network for urgent tasks: Fairness oriented design with DRL[J]. IEEE Transactions on Vehicular Technology, 2025, 74(1): 1736–1741. doi: 10.1109/TVT.2024.3453333. [14] XU Fang, XIE Zhijie, HU Kai, et al. Multiantenna UAV-assisted hybrid FSO/RF data collection for IoT: Optimal design for fairness[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(5): 12376–12386. doi: 10.1109/TAES.2025.3572070. [15] LEE J H, PARK K H, KO Y C, et al. Throughput maximization of mixed FSO/RF UAV-aided mobile relaying with a buffer[J]. IEEE Transactions on Wireless Communications, 2021, 20(1): 683–694. doi: 10.1109/TWC.2020.3028068. [16] ZHANG Xiwen, ZHAO Shanghong, WANG Yuan, et al. 3-D trajectory optimization for UAV-assisted hybrid FSO/RF network with moving obstacles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 1692–1704. doi: 10.1109/TAES.2024.3462685. [17] WEI Xinyi, LI Ruoguang, CHEN Yingyang, et al. Coordinated rate-splitting multiple access for emergency UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Cognitive Communications and Networking, 2026, 12: 5999–6015. doi: 10.1109/TCCN.2026.3660777. [18] HUANG Qiulei, WANG Wei, LU Weidang, et al. Resource allocation for multi-cluster NOMA-UAV networks[J]. IEEE Transactions on Communications, 2022, 70(12): 8448–8459. doi: 10.1109/TCOMM.2022.3220702. [19] 冯斯梦, 张云弈, 刘凯, 等. 低空混合障碍下无人机协同多智能体航迹规划[J]. 电子与信息学报, 2025, 47(5): 1291–1300. doi: 10.11999/JEIT250012.FENG Simeng, ZHANG Yunyi, LIU Kai, et al. Collaborative multi-agent trajectory optimization for unmanned aerial vehicles under low-altitude mixed-obstacle airspace[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1291–1300. doi: 10.11999/JEIT250012. [20] MOON H J, CHAE C B, WONG K K, et al. A generalized pointing error model for FSO links with fixed-wing UAVs for 6G: Analysis and trajectory optimization[J]. IEEE Transactions on Wireless Communications, 2025, 24(7): 5723–5737. doi: 10.1109/TWC.2025.3549062. [21] ZENG Fanzi, HU Zhenzhen, XIAO Zhu, et al. Resource allocation and trajectory optimization for QoE provisioning in energy-efficient UAV-enabled wireless networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 7634–7647. doi: 10.1109/TVT.2020.2986776. [22] FENG Simeng, ZHAO Yidi, KAI Liu, et al. Fine-grained particle swarm optimization for UAV trajectory design in FSO relay communication[C]. 2024 IEEE/CIC International Conference on Communications in China (ICCC), Hangzhou, China, 2024: 2029–2034. doi: 10.1109/ICCC62479.2024.10681835. [23] MENG Anqi, GAO Xiaozheng, ZHAO Yao, et al. Three-dimensional trajectory optimization for energy-constrained UAV-enabled IoT system in probabilistic LoS channel[J]. IEEE Internet of Things Journal, 2022, 9(2): 1109–1121. doi: 10.1109/JIOT.2021.3079363. [24] SAMY R, YANG Hongchuan, RAKIA T, et al. Hybrid SAG-FSO/SH-FSO/RF transmission for next-generation satellite communication systems[J]. IEEE Transactions on Vehicular Technology, 2023, 72(11): 14255–14267. doi: 10.1109/TVT.2023.3281256. [25] XU Guanjun, LU Shuyuan, QU Lin, et al. Outage probability and average BER of UAV-assisted RF/FSO system for space-air-ground integrated networks under angle-of-arrival fluctuations[J]. IEEE Internet of Things Journal, 2024, 11(20): 34009–34023. doi: 10.1109/JIOT.2024.3435458. [26] NAJAFI M, AJAM H, JAMALI V, et al. Statistical modeling of the FSO fronthaul channel for UAV-based communications[J]. IEEE Transactions on Communications, 2020, 68(6): 3720–3736. doi: 10.1109/TCOMM.2020.2981560. [27] SONG S, CHOI M, KO D E, et al. Multi-UAV trajectory optimization considering collisions in FSO communication networks[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3378–3394. doi: 10.1109/JSAC.2021.3088665. [28] LAPIDOTH A, MOSER S M, and WIGGER M A. On the capacity of free-space optical intensity channels[J]. IEEE Transactions on Information Theory, 2009, 55(10): 4449–4461. doi: 10.1109/TIT.2009.2027522. [29] QIN Peng, WU Xue, FU Min, et al. Latency minimization resource allocation and trajectory optimization for UAV-assisted cache-computing network with energy recharging[J]. IEEE Transactions on Communications, 2025, 73(8): 5715–5728. doi: 10.1109/TCOMM.2025.3534587. [30] DING Ruijin, GAO Feifei, and SHEN X S. 3D UAV trajectory design and frequency band allocation for energy-efficient and fair communication: A deep reinforcement learning approach[J]. IEEE Transactions on Wireless Communications, 2020, 19(12): 7796–7809. doi: 10.1109/TWC.2020.3016024. -

 下载:
下载:


图(8) / 表(4)
计量
- 文章访问数: 228
- HTML全文浏览量: 90
- PDF下载量: 30
- 被引次数: 0
