

A Tensor Framework for ISAC: Information Fusion-Enhanced Channel Estimation and Target Localization
-
摘要: 通信感知一体化(ISAC)能够通过共享频谱与硬件资源实现通信与感知功能的协同,其关键难题之一在于信道与感知目标参数的估计与定位,且二者的信息融合也是提升系统性能的重要环节。为此,该文研究了ISAC系统中基于信息融合的信道/感知目标参数估计与定位问题。首先,利用毫米波多输入多输出ISAC信道与感知目标参数的内在关联,构建统一张量框架,将上行信道与感知目标参数估计分别表述为两个结构化张量分解问题。然后,提出一种迭代与闭式分解相结合的张量算法,实现离开角、到达角、时延、多普勒频移和系数等参数的估计,进而完成移动发射端、散射点及感知目标的定位。通过匹配散射点与感知目标,融合其多普勒频移与位置信息来提高散射点估计精度。此外,该文还推导了克拉美罗界作为性能基准。仿真表明,所提算法在相对低的计算复杂度下实现了高精度的信道估计与目标定位,且信息融合进一步提升了散射点多普勒频移与位置估计性能。Abstract:
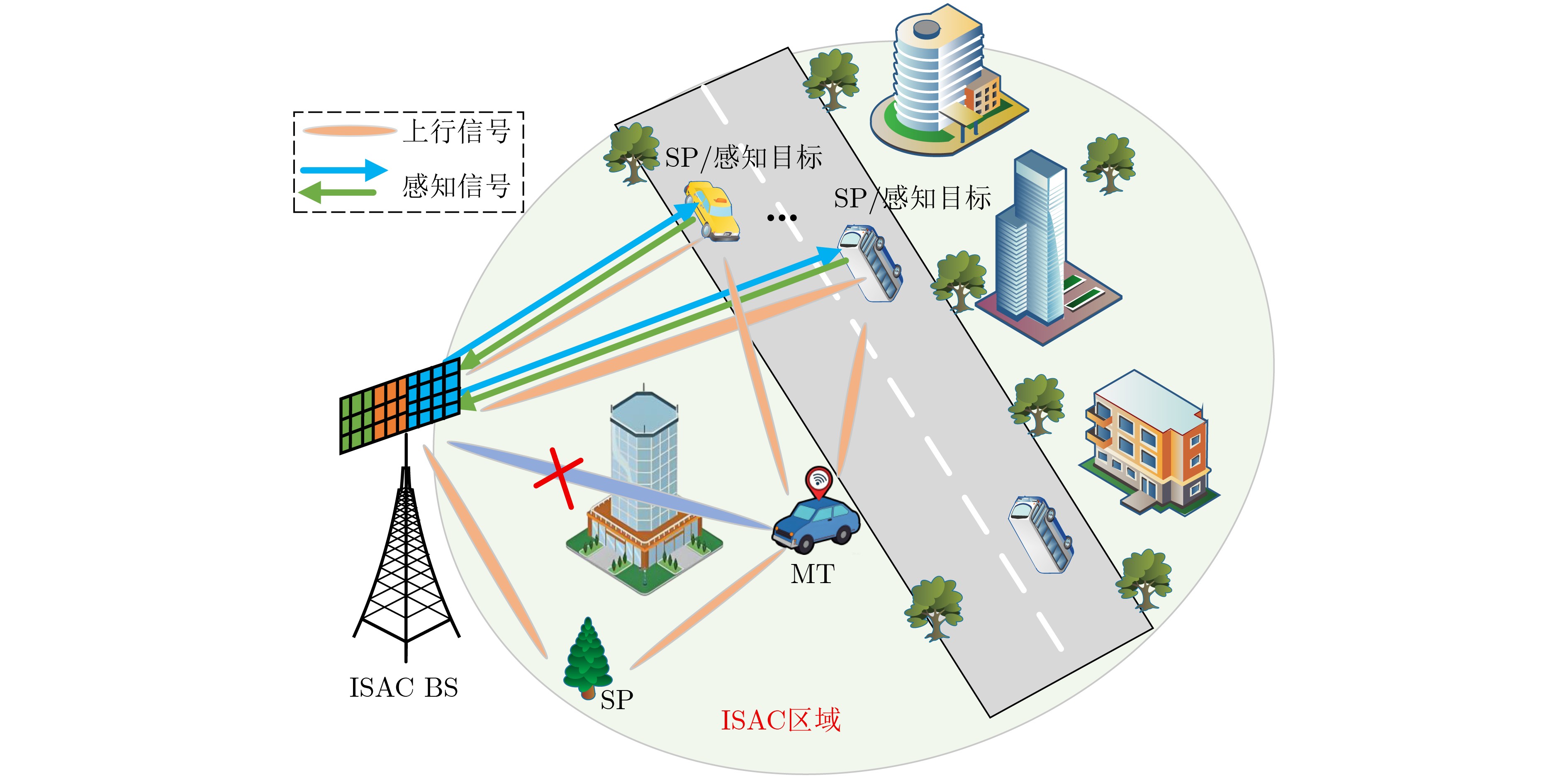
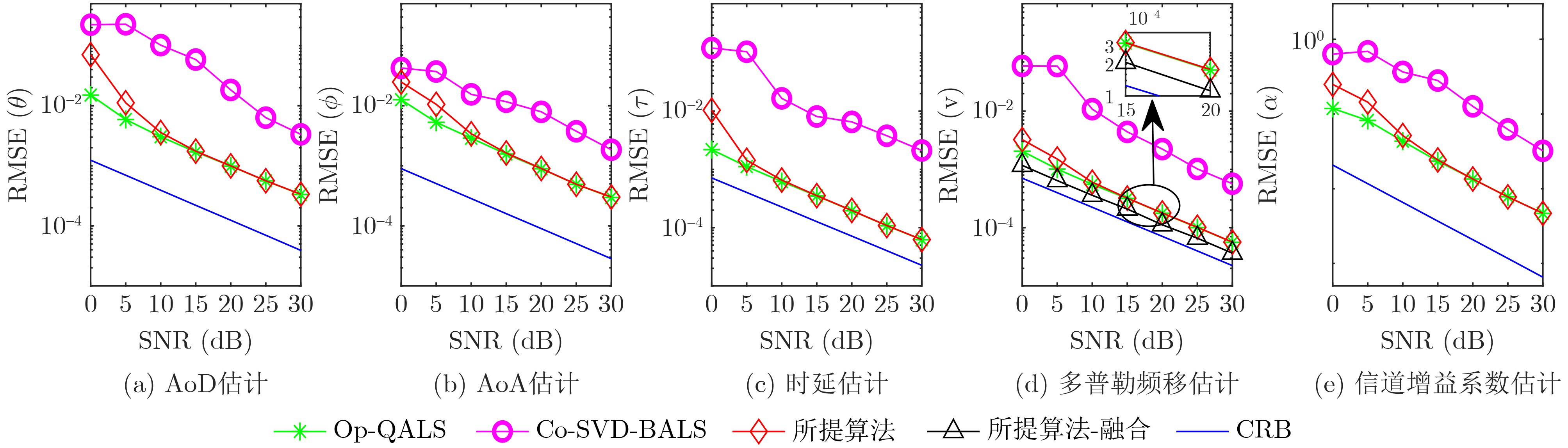
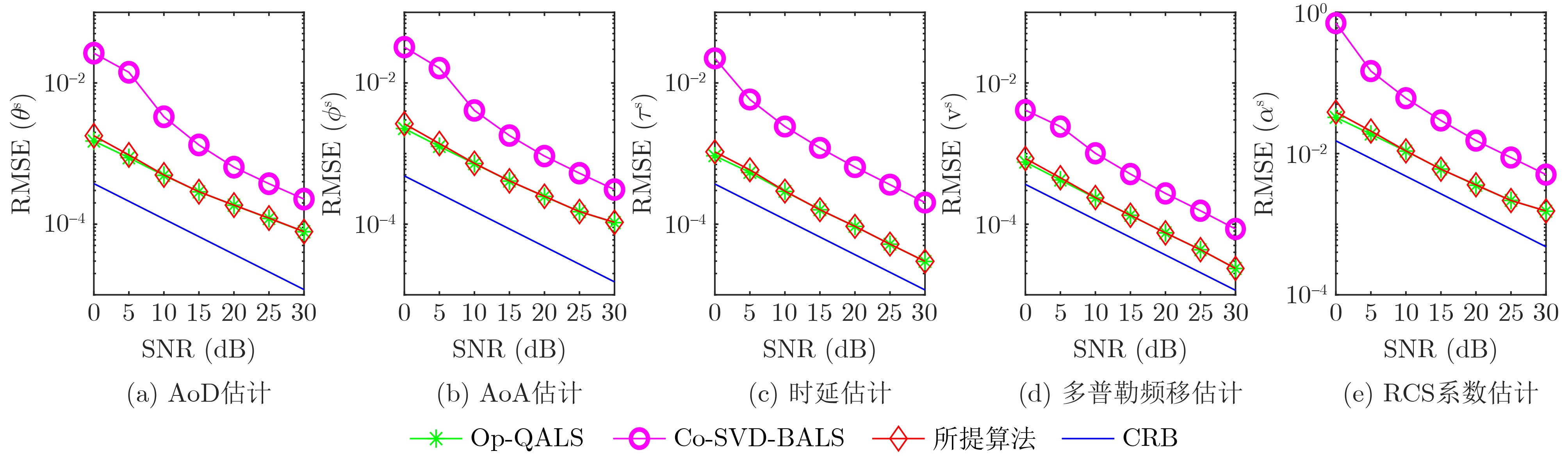
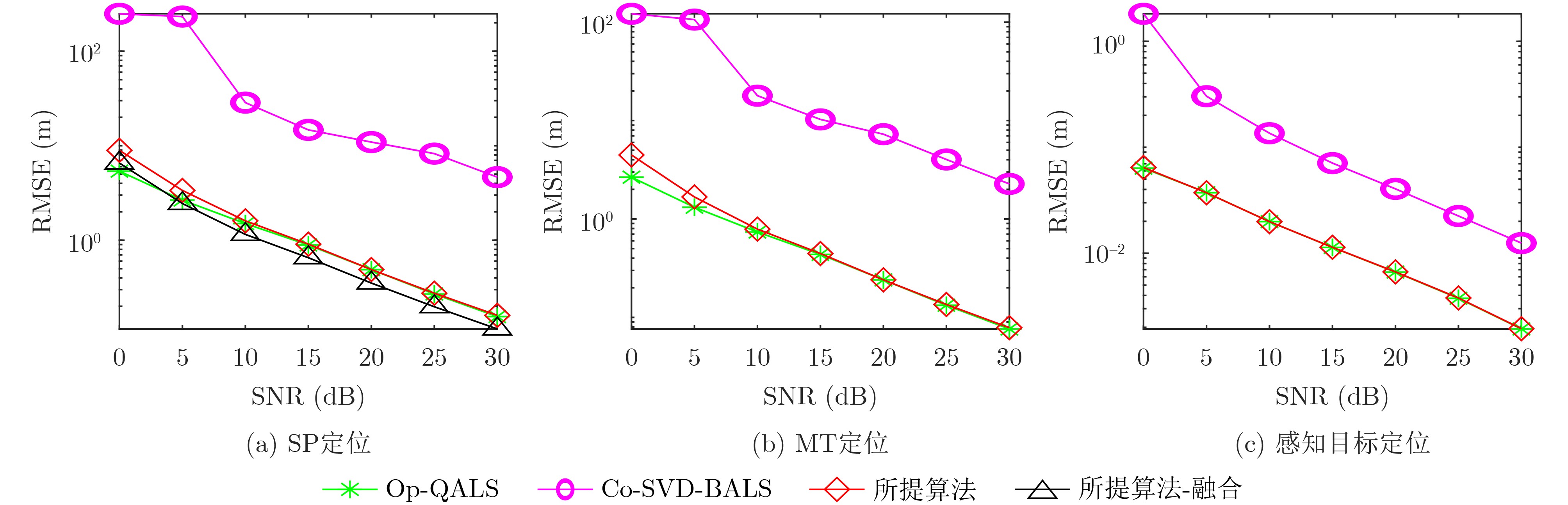
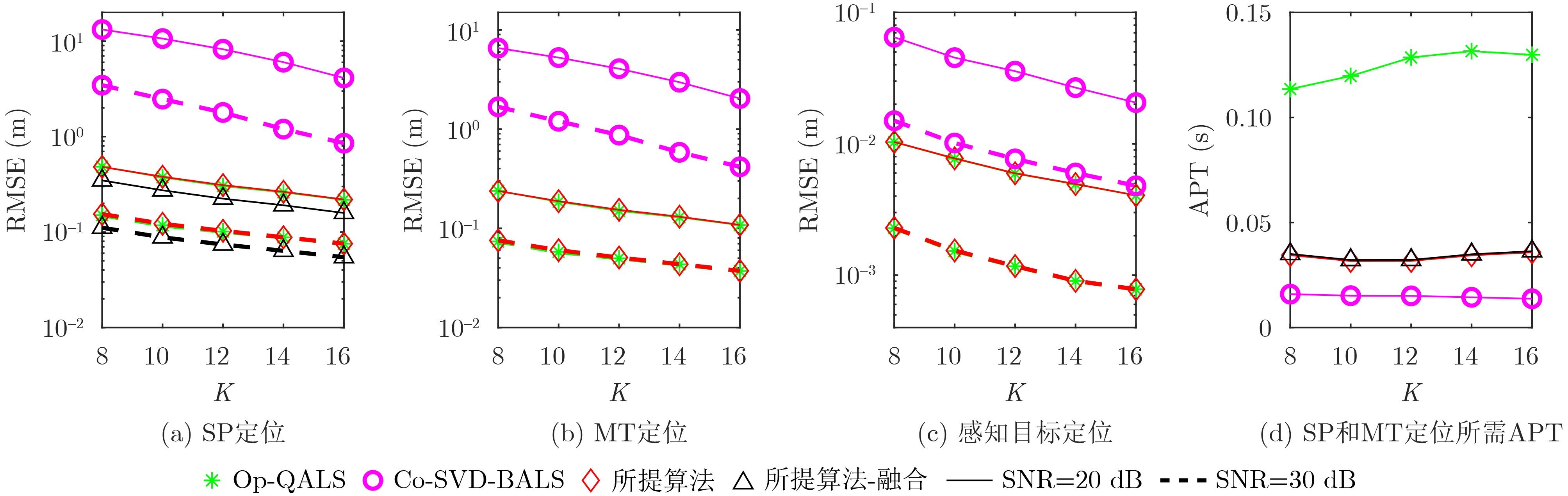
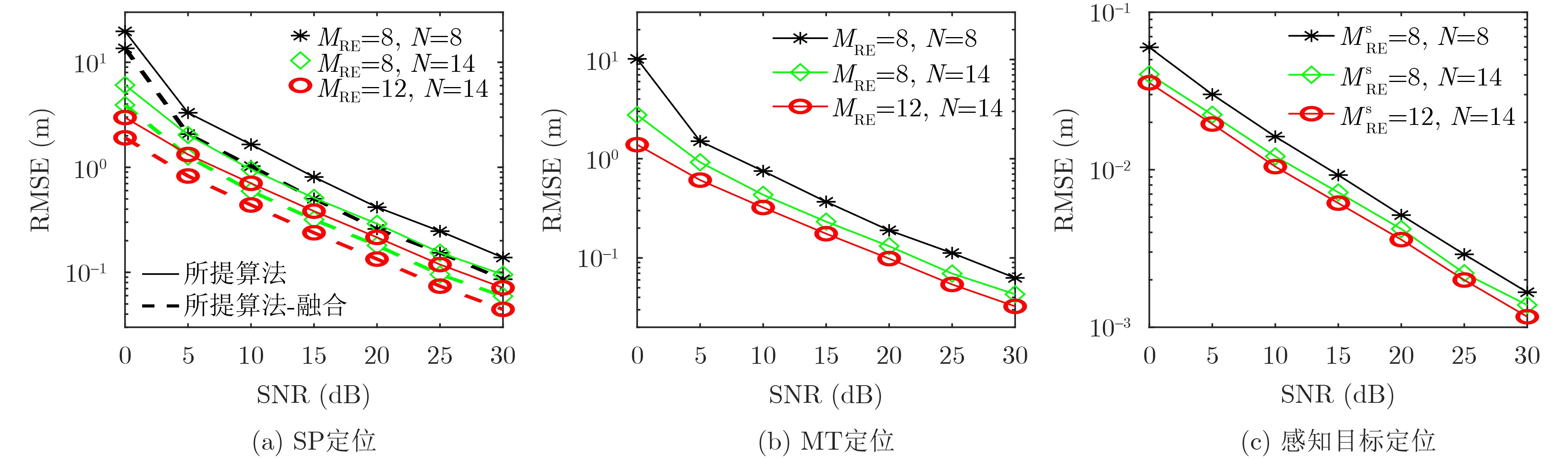
Objective Communication and sensing systems are moving toward higher frequency bands, larger antenna arrays, and smaller hardware. Their hardware architectures, channel characteristics, and signal processing methods are therefore becoming increasingly similar. This trend supports Integrated Sensing And Communication (ISAC), in which joint estimation of channel and sensing target parameters has become a key research topic. Existing studies have achieved joint estimation of these two parameter categories within a unified tensor framework, but two limitations remain. First, most studies focus on parameter estimation and do not further convert multidimensional estimates into accurate localization of Scatterer Points (SPs), the Mobile Transmitter (MT), and sensing targets. This limitation prevents a complete spatial characterization of the wireless propagation environment. Second, the fusion of channel and sensing target parameter information has received limited attention, which restricts further improvement in parameter estimation and localization accuracy. Methods To address channel/sensing target parameter estimation and localization in millimeter-Wave (mmWave) Multiple-Input Multiple-Output (MIMO) ISAC systems, this paper proposes a tensor decomposition algorithm based on information fusion. First, a unified fourth-order PARAllel FACtor (PARAFAC) model is constructed at the Base Station (BS) for uplink channel and sensing target parameter estimation. To reduce computational complexity, the fourth-order tensor model is transformed into a third-order form, and the Trilinear Alternating Least Squares (TALS) method is used to estimate three factor matrices. The special structure of one factor matrix is then exploited. A closed-form decomposition is used to decouple the coupled factor matrix, and Angle of Departure (AoD), Angle of Arrival (AoA), time delay, Doppler shift, and coefficients are extracted from the four estimated factor matrices. Based on these estimates, the MT, SPs, and sensing targets are localized separately using geometric relationships. The estimation accuracy of SPs is further improved by fusing Doppler shift and position information from SPs and sensing targets. The Cramér-Rao Bound (CRB) is derived as a theoretical performance benchmark for the five types of parameters. Results and Discussions The first simulation experiment shows that the proposed algorithm and the Optimized Quadrilinear Alternating Least Squares (Op-QALS) algorithm outperform the Co-SVD-BALS algorithm in terms of Root Mean Square Error (RMSE) for channel/sensing target parameter estimation and localization ( Fig. 2 ,Fig. 3 ,Fig. 4 ). With information fusion, the proposed algorithm achieves the best Doppler shift and position estimation performance for SPs (Fig. 2(d) ,Fig. 4(a) ). This advantage occurs because the proposed algorithm and Op-QALS fully exploit the multidimensional structure of the received signal. The fusion operation further improves the estimation capability of the proposed algorithm, whereas Co-SVD-BALS accumulates errors during stepwise factor matrix estimation. In terms of Average Processing Time (APT), the proposed algorithm requires slightly more time for localization than Co-SVD-BALS, but far less time than Op-QALS (Table 1 andTable 2 ). The proposed algorithm therefore achieves accurate parameter estimation and localization at a reasonable computational cost. The second simulation experiment shows that, under two Signal-to-Noise Ratio (SNR) levels, the localization accuracy of all algorithms improves as $ K $ increases. The proposed algorithm maintains SP and MT localization accuracy comparable to that of Op-QALS, while requiring much lower APT (Fig. 5 ). The fusion operation does not substantially increase the APT of the proposed algorithm (Fig. 5(d) ). The third simulation experiment indicates that increasing $ {M}_{\mathrm{RE}}\left(M_{\mathrm{RE}}^{\mathrm{s}}\right) $ and $ N $ improves the ability of the proposed algorithm to resolve multipath signals, thereby yielding more accurate localization (Fig. 6 ).Conclusions This paper proposes an information fusion algorithm for channel/sensing target parameter estimation and localization within a unified tensor framework. By exploiting the Vandermonde structure of a factor matrix, the proposed algorithm preserves estimation accuracy while reducing computational complexity. The fusion operation further improves SP parameter estimation and localization without a substantial increase in computational overhead. Future work will extend the algorithm to more general array configurations and examine higher-order tensor processing for multi-BS cooperation and multi-user access scenarios. -
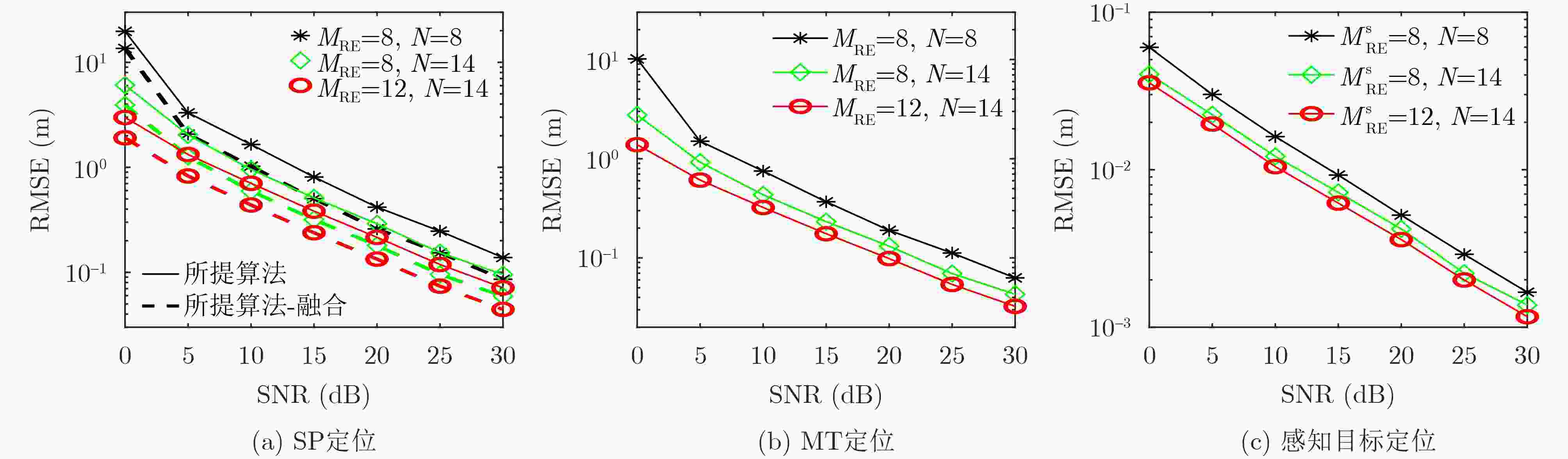
图 6 在不同$ {M}_{\mathrm{RE}}\left(M_{\mathrm{RE}}^{\mathrm{s}}\right) $和$ N $下,所提算法定位SP, MT和感知目标的RMSE性能随SNR变化图
1 基于信息融合的张量分解算法
输入:上行信道(或感知信道)张量模型$ {{\mathcal{Z}}} $(或$ {{{\mathcal{Z}}}^s} $),混合预编码矩
阵$ \boldsymbol{F} $(或$ {\boldsymbol{F}}^{\mathrm{s}} $),组合矩阵$ \boldsymbol{W} $(或$ {\boldsymbol{W}}^{\mathrm{s}} $)输出:$ \left\{{\hat{\theta }}_{l},{\hat{\phi }}_{l},{\hat{\tau }}_{l},{\hat{v}}_{l},{\hat{\alpha }}_{l}\right\} $, $ \left\{\hat{\theta }_{q}^{\mathrm{s}},\hat{\phi }_{q}^{\mathrm{s}},\hat{\tau }_{q}^{\mathrm{s}},\hat{v}_{q}^{\mathrm{s}},\hat{\alpha }_{q}^{\mathrm{s}}\right\} $, $ {\hat{\boldsymbol{p}}}_{\mathrm{M}} $, $ {\hat{\boldsymbol{p}}}_{l} $,
$ \hat{\boldsymbol{p}}_{q}^{\mathrm{s}} $,融合后$ L $个SP的多普勒频移和位置信息(1) 将$ {{\mathcal{Z}}} $进行重排得到$ \overline{\mathcal{Z} } $,利用TALS方法迭代求解出
$ \left\{{\hat{\tilde{\boldsymbol{A}}}}_{\mathrm{T}},{\hat{\tilde{\boldsymbol{A}}}}_{\mathrm{R}},\hat{\boldsymbol{E}}\right\} $(2) for$ l=1,2,\cdots ,L $ (3) 对$ {\boldsymbol{E}}_{\colon ,l} $进行逆矢量化操作得到秩1矩阵$ {\overline{\boldsymbol{E}}}^{\left(l\right)} $,并且计算
$ {\overline{\boldsymbol{E}}}^{\left(l\right)} $的SVD(4) 利用式(9)得到$ \hat{\boldsymbol{C}} $和$ \hat{\boldsymbol{D}} $ (5) end for (6) 利用式(10)消除$ \hat{\boldsymbol{C}} $和$ \hat{\boldsymbol{D}} $的尺度模糊 (7) 重复步骤(1)–步骤(6),得到$ \left\{\hat{\tilde{\boldsymbol{A}}}_{\mathrm{T}}^{\mathrm{s}},\hat{\tilde{\boldsymbol{A}}}_{\mathrm{R}}^{\mathrm{s}},{\hat{\boldsymbol{C}}}^{\mathrm{s}},{\hat{\boldsymbol{D}}}^{\mathrm{s}}\right\} $ (8) 利用式(11)求解出$ {\hat{\theta }}_{l} $和$ {\hat{\phi }}_{l} $ (9) 利用式(12)和取相位操作求解出$ {\hat{\tau }}_{l} $和$ {\hat{v}}_{l} $,并结合式(13)和
式(14)求解出$ \hat{\boldsymbol{\alpha }} $(10) 重复步骤(8)~步骤(9),得到$ \left\{\hat{\theta }_{q}^{\mathrm{s}},\hat{\phi }_{q}^{\mathrm{s}},\hat{\tau }_{q}^{\mathrm{s}},\hat{v}_{q}^{\mathrm{s}},\hat{\alpha }_{q}^{\mathrm{s}}\right\} $ (11) 定义$ {\boldsymbol{p}}_{\mathrm{B}} $,结合式(16)和(17)求解出$ {\hat{\boldsymbol{p}}}_{\mathrm{M}} $ (12) 利用式(18)求解出$ {\hat{\boldsymbol{p}}}_{l} $ (13) 在获得感知参数的基础上直接利用几何关系求解出$ \hat{\boldsymbol{p}}_{q}^{\mathrm{s}} $ (14) 构建规范化距离矩阵$ {\boldsymbol{\varPsi }} $,并且初始化全零矩阵$ {\boldsymbol{\varUpsilon}} $ (15) 计算布尔矩阵$ {\boldsymbol{\varTheta }} $,进而得到升序序号矢量$ {\boldsymbol{\mu }}_{\mathrm{seq}} $ (16) for $ e=1,2,\cdots ,Q $ (17) 令$ q=\boldsymbol{\mu }_{\mathrm{se}\mathrm{q}}^{\mathrm{e}} $,计算$ i=\underset{l}{\arg \min }{{\boldsymbol{\varPsi }}}_{q,l} $,并且更新$ {{\boldsymbol{\varUpsilon}}}_{q,i}=1 $ (18) 将第$ q $个感知目标与第$ i $个SP的位置和多普勒频移信息按
照文献[19]中的匹配融合定理4进行融合,并设置
$ {{\boldsymbol{\varUpsilon}}}_{\colon ,i}=+\mathrm{\infty } $(19) end for  下载: 导出CSV
下载: 导出CSV
表 1 不同算法定位SP和MT所需要的APT (s)
算法 SNR(dB) 0 5 10 15 20 25 30 Op-QALS 0.0441 0.0525 0.0638 0.0762 0.0916 0.1090 0.1163 Co-SVD-BALS 0.0088 0.0088 0.0127 0.0233 0.0236 0.0238 0.0249 所提算法 0.0381 0.0370 0.0250 0.0269 0.0271 0.0292 0.0291
下载: 导出CSV
表 2 不同算法定位感知目标所需要的APT (s)
算法 SNR(dB) 0 5 10 15 20 25 30 Op-QALS 0.0290 0.0318 0.0357 0.0406 0.0438 0.0463 0.0481 Co-SVD-BALS 0.0083 0.0096 0.0096 0.0098 0.0100 0.0103 0.0104 所提算法 0.0184 0.0180 0.0153 0.0149 0.0150 0.0150 0.0154
下载: 导出CSV
-
[1] HE Yihao, PENG Zhendong, LIU Min, et al. Full-order tensor-based parameters estimation and channel reconstruction for heterogeneous Bi-static mmWave ISAC[J]. IEEE Transactions on Vehicular Technology, 2025, 74(12): 19171–19187. doi: 10.1109/TVT.2025.3585612. [2] SAAD W, BENNIS M, and Chen Mingzhe. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems[J]. IEEE Network, 2020, 34(3): 134–142. doi: 10.1109/MNET.001.1900287. [3] 罗欣, 杜建和, 张耀, 等. 可重构智能表面辅助近场通信感知一体化系统基于嵌套张量的同时定位与通信方法[J]. 电子与信息学报, 2025, 47(4): 979–990. doi: 10.11999/JEIT240566.LUO Xin, DU Jianhe, ZHANG Yao, et al. Nested tensor-based simultaneous localization and communication method for RIS-assisted near-field integrated sensing and communication systems[J]. Journal of Electronics & Information Technology, 2025, 47(4): 979–990. doi: 10.11999/JEIT240566. [4] HAN Kawon, MENG Kaitao, WANG Xiaoyang, et al. Network-level ISAC design: State-of-the-art, challenges, and opportunities[J]. IEEE Journal of Selected Topics in Electromagnetics, Antennas and Propagation, 2025, 1(1): 65–83. doi: 10.1109/JSTEAP.2025.3603139. [5] WEI Zhiqing, JIA Jinzhu, NIU Yangyang, et al. Integrated sensing and communication channel modeling: A survey[J]. IEEE Internet of Things Journal, 2025, 12(12): 18850–18864. doi: 10.1109/JIOT.2024.3449377. [6] 黄高见, 张盛壮, 丁元, 等. 方向调制多载波通感一体化波形设计研究[J]. 电子与信息学报, 2026, 48(2): 640–650. doi: 10.11999/JEIT250680.HUANG Gaojian, ZHANG Shengzhuang, DING Yuan, et al. Research on directional modulation multi-carrier waveform design for integrated sensing and communication[J]. Journal of Electronics & Information Technology, 2026, 48(2): 640–650. doi: 10.11999/JEIT250680. [7] LI Biwei, WANG Xianbin, and FANG Fang. Maximizing the value of service provisioning in multi-user ISAC systems through fairness guaranteed collaborative resource allocation[J]. IEEE Journal on Selected Areas in Communications, 2024, 42(9): 2243–2258. doi: 10.1109/JSAC.2024.3413973. [8] ZHAO Zongyao, LIU Zhenyu, JIANG Rui, et al. Joint beamforming for multi-target detection and multi-user communication in ISAC systems[J]. IEEE Transactions on Vehicular Technology, 2025, 74(9): 14938–14942. doi: 10.1109/TVT.2025.3565412. [9] LIU Haotian, WEI Zhiqing, LI Fengyun, et al. Integrated sensing and communication signal processing based on compressed sensing over unlicensed spectrum bands[J]. IEEE Transactions on Cognitive Communications and Networking, 2024, 10(5): 1801–1816. doi: 10.1109/TCCN.2024.3391307. [10] ZHANG Xue, ZHENG Zhi, WANG Wenqin, et al. Joint DOD and DOA estimation of coherent targets for coprime MIMO radar[J]. IEEE Transactions on Signal Processing, 2023, 71: 1408–1420. doi: 10.1109/TSP.2023.3267991. [11] DU Jianhe, YU Weijia, CHEN Yuanzhi, et al. Tensor-based angle estimation for Bistatic MIMO radar systems with Multislot gain-phase error[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8411–8427. doi: 10.1109/TAES.2023.3303857. [12] DUONG N S, NGUYEN Q T, and DINH-THI T M. OMP-based channel estimation with dynamic grid for mmWave MIMO positioning systems[J]. IEEE Communications Letters, 2023, 27(10): 2623–2627. doi: 10.1109/LCOMM.2023.3303453. [13] ZHOU Zhou, FANG Jun, YANG Linxiao, et al. Low-rank tensor decomposition-aided channel estimation for millimeter wave MIMO-OFDM systems[J]. IEEE Journal on Selected Areas in Communications, 2017, 35(7): 1524–1538. doi: 10.1109/JSAC.2017.2699338. [14] ZHANG Ruoyu, CHENG Lei, WANG Shuai, et al. Integrated sensing and communication with massive MIMO: A unified tensor approach for channel and target parameter estimation[J]. IEEE Transactions on Wireless Communications, 2024, 23(8): 8571–8587. doi: 10.1109/TWC.2024.3351856. [15] ZHANG Ruoyu, WU Xiaopeng, LOU Yi, et al. Channel-training-aided target sensing for terahertz integrated sensing and massive MIMO communications[J]. IEEE Internet of Things Journal, 2025, 12(4): 3755–3770. doi: 10.1109/JIOT.2024.3447584. [16] YANG Tiancheng, HE Dongxuan, HOU Huazhou, et al. A unified tensor-based joint AUD and ISAC parameter estimation with large-scale user access[J]. IEEE Transactions on Cognitive Communications and Networking, 2025, 11(5): 3047–3061. doi: 10.1109/TCCN.2025.3545690. [17] GUPTA A, GANJI P, SRIVASTAVA S, et al. Data-aided Bistatic sensing and communication for mmWave MIMO-OFDM ISAC systems[J]. IEEE Transactions on Communications, 2025, 73(10): 9720–9734. doi: 10.1109/TCOMM.2025.3562360. [18] LI Yinchuan, WANG Xiaodong, and DING Zegang. Multi-target position and velocity estimation using OFDM communication signals[J]. IEEE Transactions on Communications, 2020, 68(2): 1160–1174. doi: 10.1109/TCOMM.2019.2956928. [19] CHEN Xu, FENG Zhiyong, ZHANG J A, et al. Downlink and uplink cooperative joint communication and sensing[J]. IEEE Transactions on Vehicular Technology, 2024, 73(8): 11318–11332. doi: 10.1109/TVT.2024.3373412. [20] DU Jianhe, HAN Meng, CHEN Yuanzhi, et al. Tensor-based joint channel estimation and symbol detection for time-varying mmWave massive MIMO systems[J]. IEEE Transactions on Signal Processing, 2021, 69: 6251–6266. doi: 10.1109/TSP.2021.3125607. -

 下载:
下载:


图(6) / 表(3)
计量
- 文章访问数: 225
- HTML全文浏览量: 97
- PDF下载量: 16
- 被引次数: 0
