

A Point Cloud Slice-based UAV SLAM Method for 3D Reconstruction of Large Container Port Areas
-
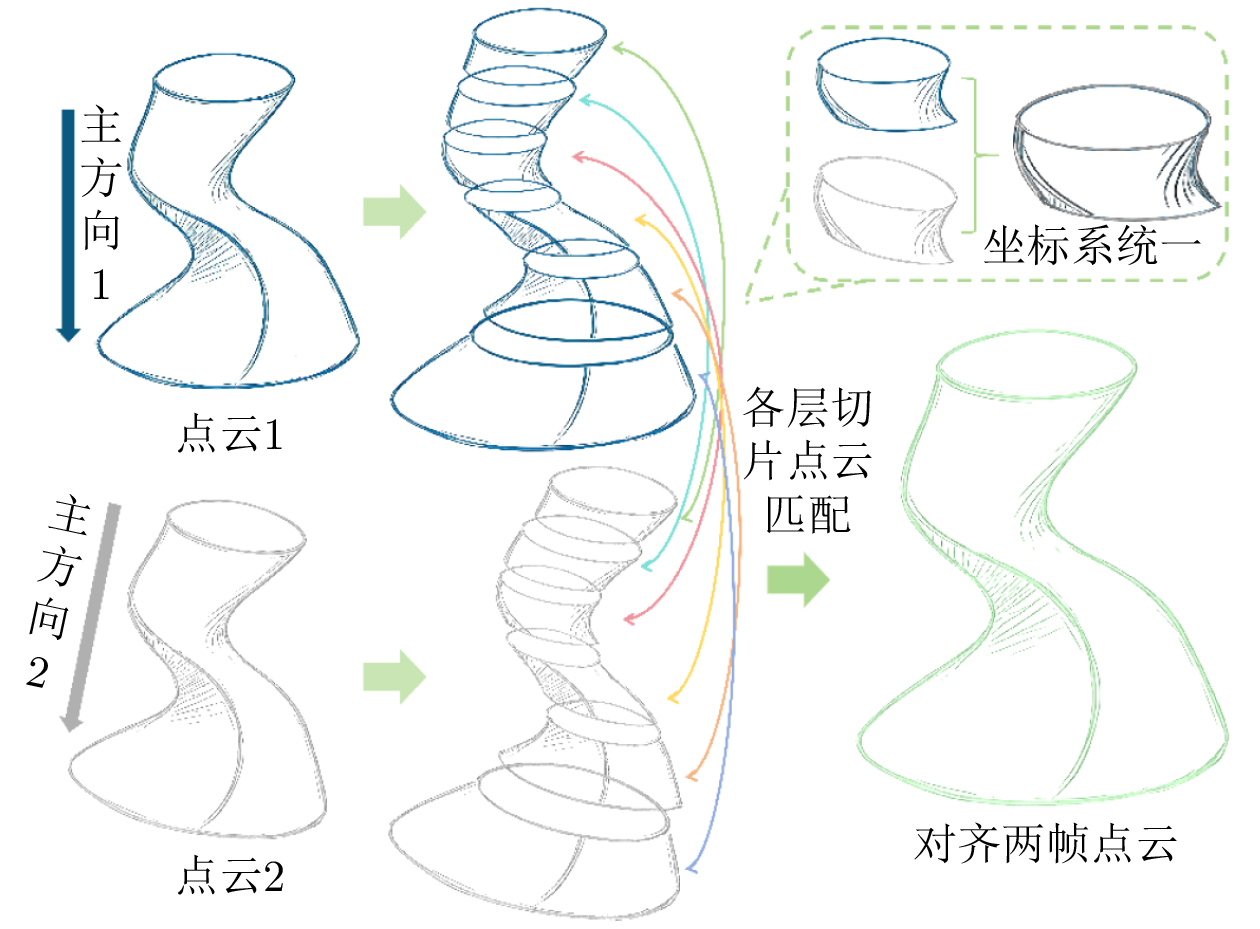
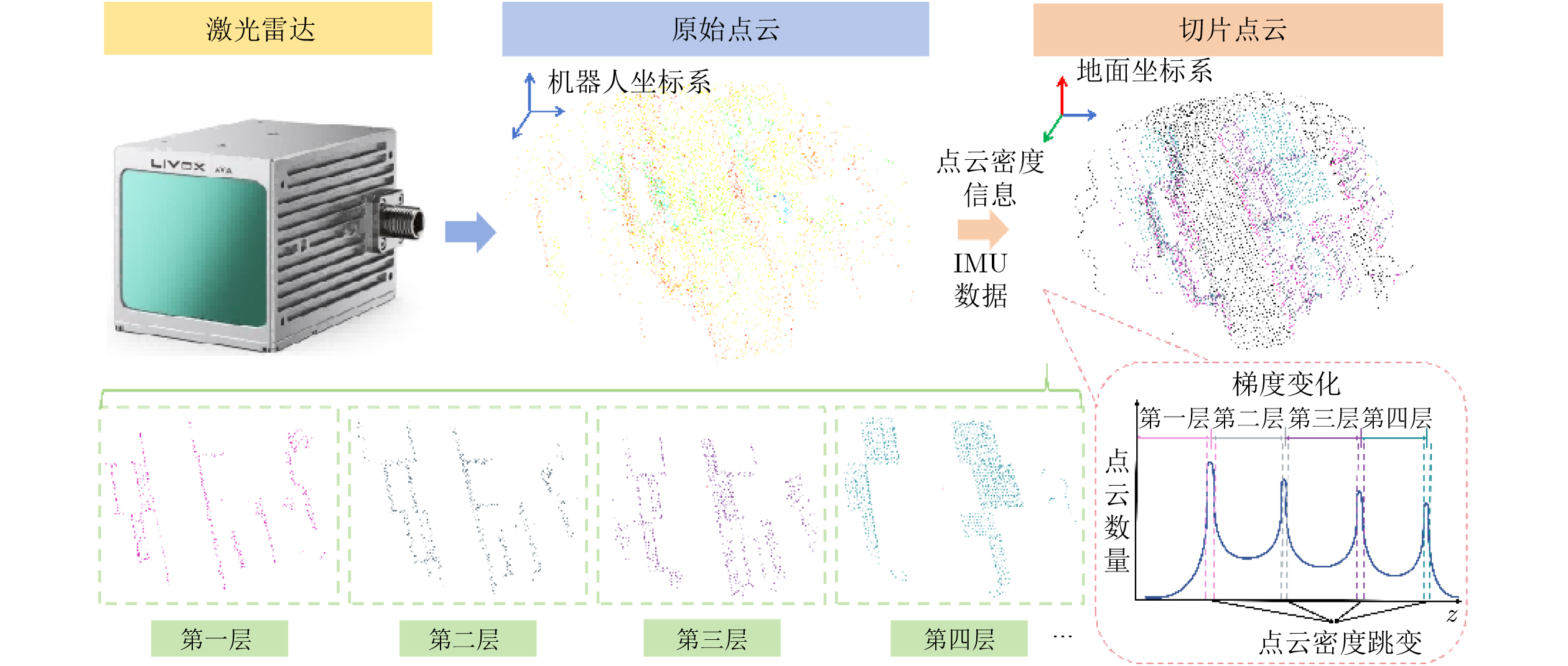
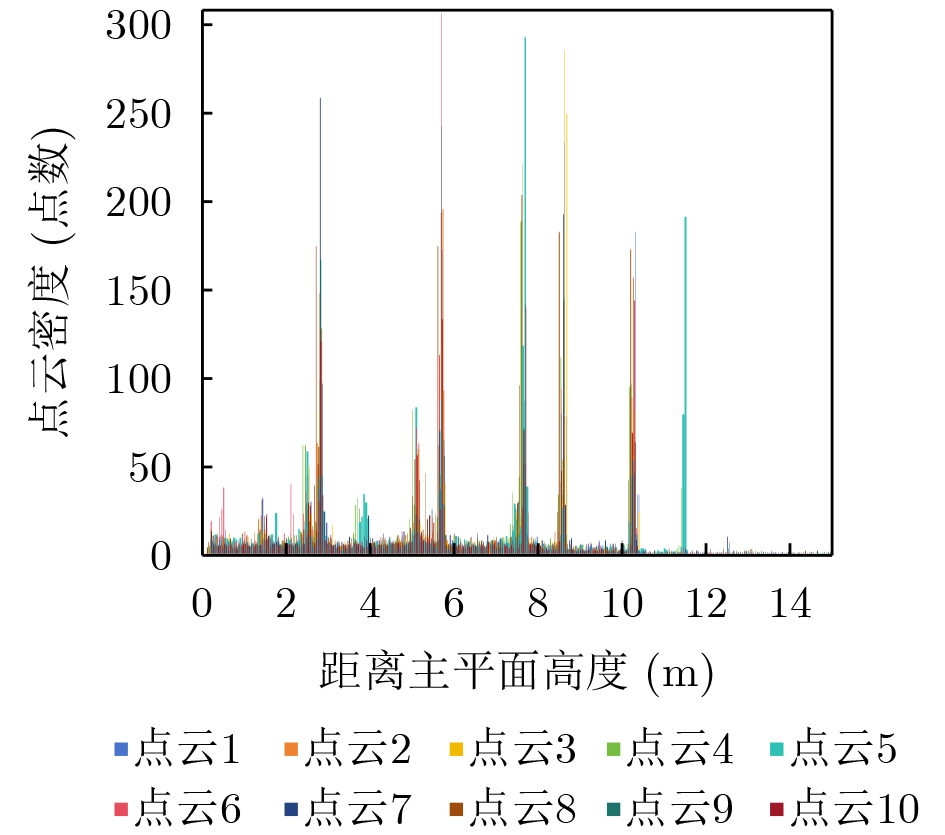
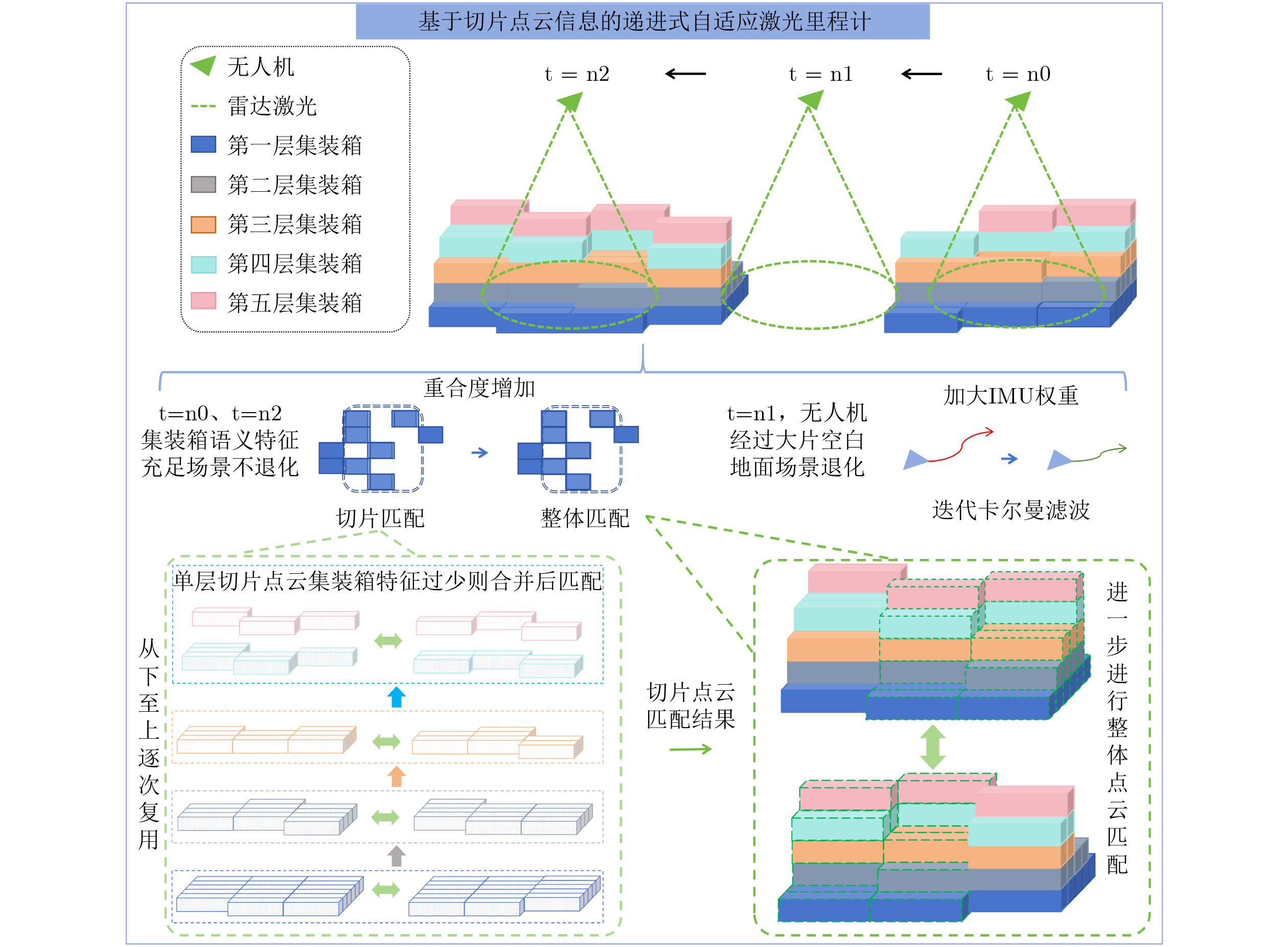
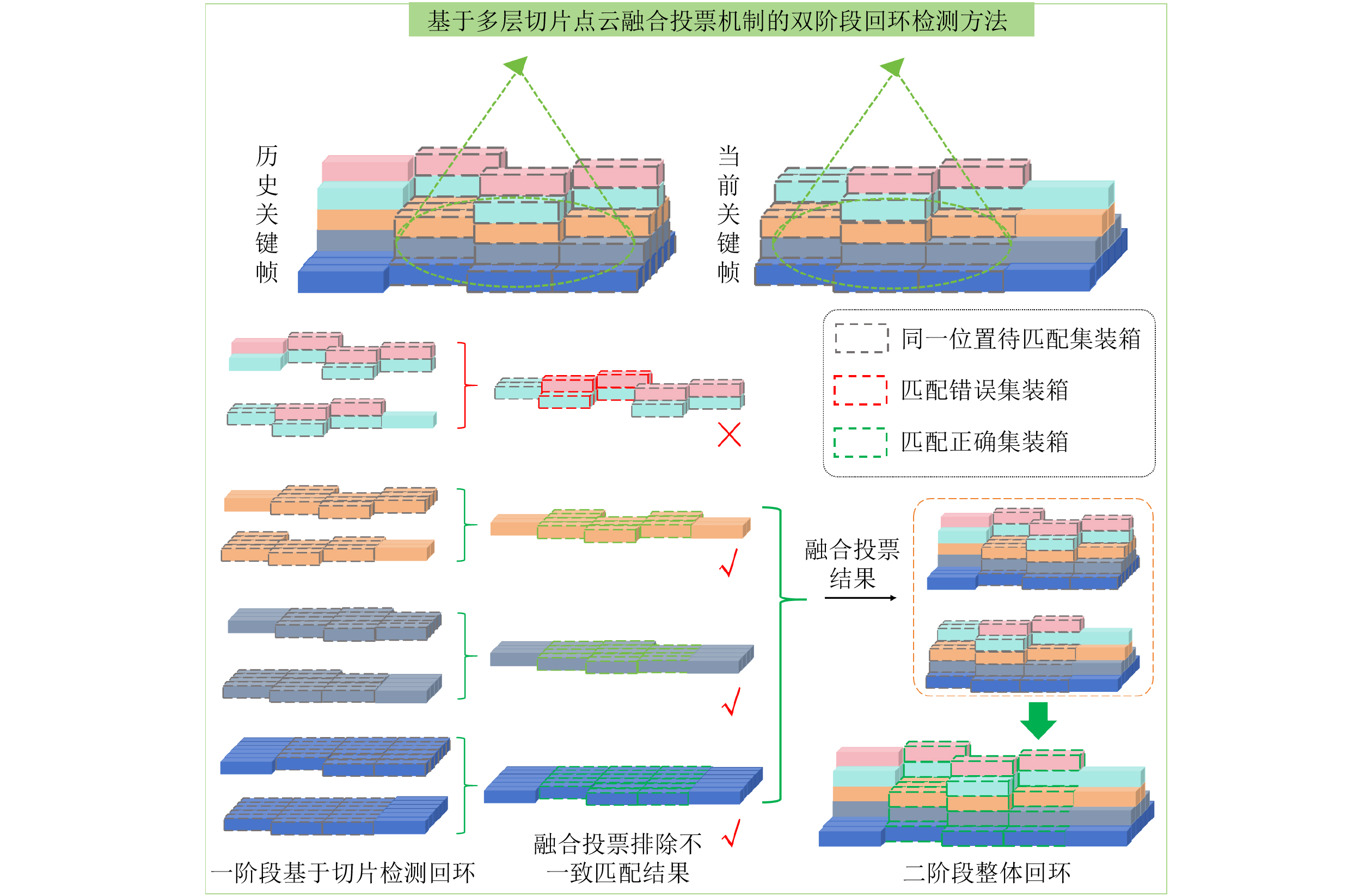
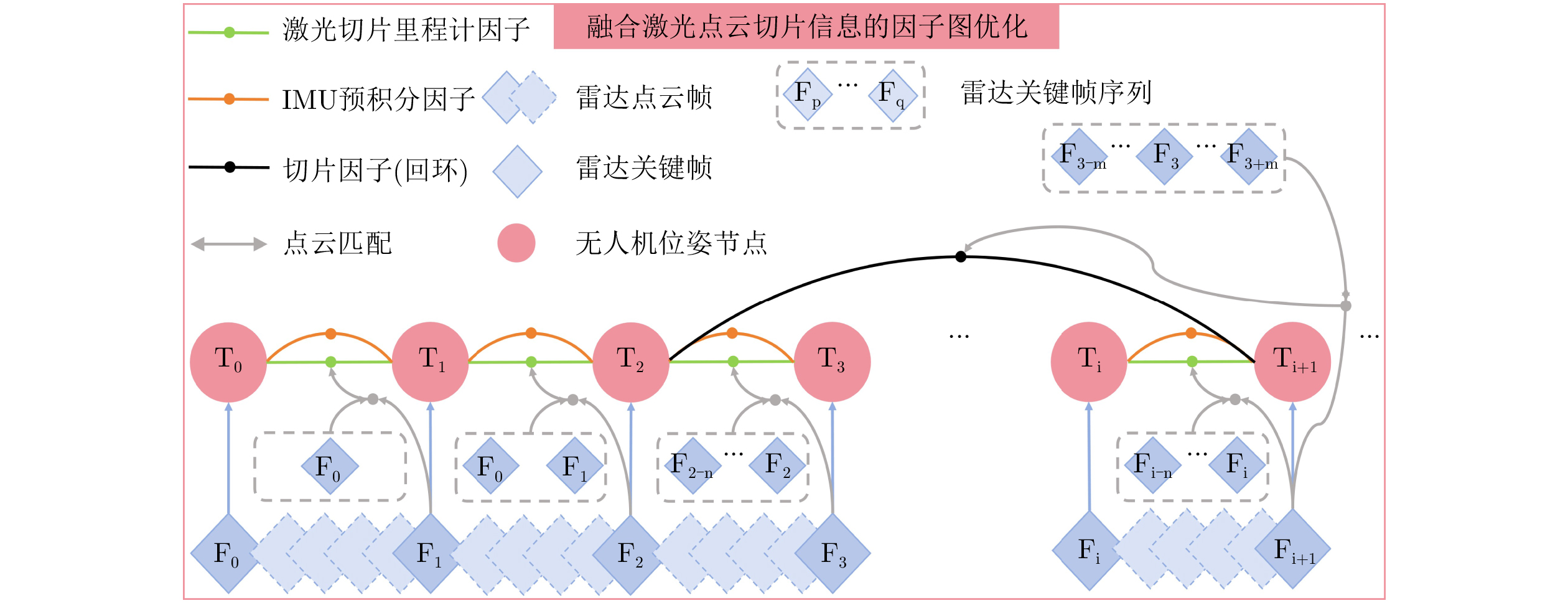
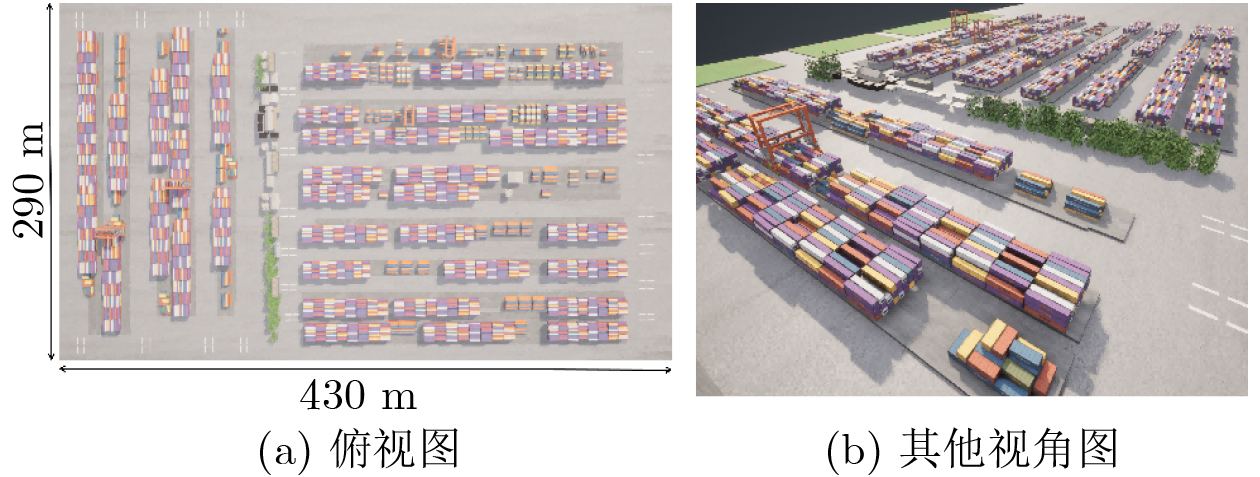
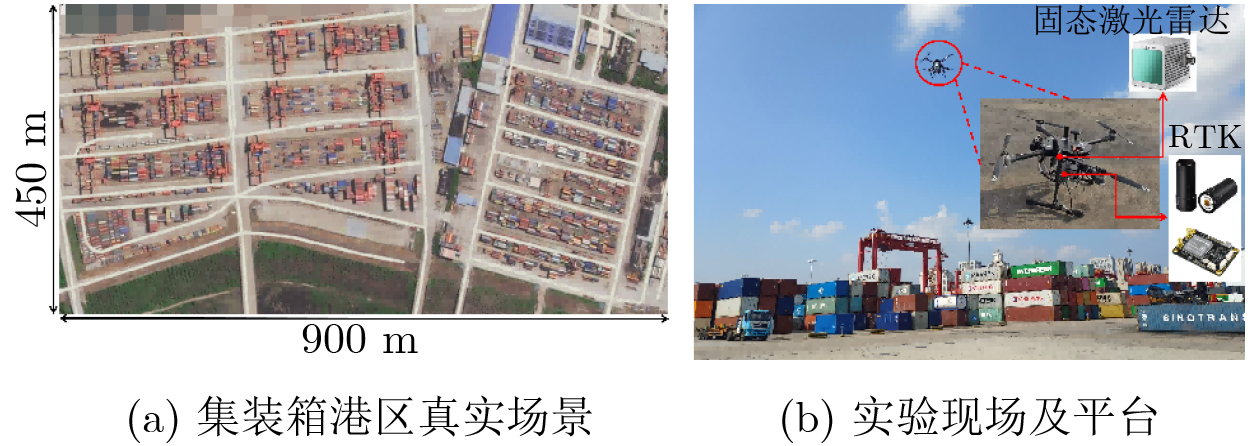
摘要: 在大型集装箱港区堆场环境中,大量重复性语义特征以及部分退化场景导致无人机在大面积场景下难以实现高效可靠的三维重建。为此,该文提出一种基于无人机点云切片同步定位与建图(SLAM)的大型集装箱港区三维重建方法,基于地面约束与点云密度梯度变化自适应提取多层切片点云,高效精准获取堆场语义信息,并基于同层切片点云匹配有效改善了里程计以及回环检测的精度。首先提出一种面向快速特征提取的点云切片方法,通过快速提取主方向并将点云划分为多层切片,高效获取多层语义点云。其次基于集装箱堆场场景特点进一步优化切片提取方法,基于重力方向简化场景主平面提取过程,并通过点云梯度变化自适应获取各层集装箱所在高程区间,构建多层切片点云。然后构建基于切片点云的递进式自适应激光里程计,利用高程切片自适应判别退化场景,同时在层间利用增量式迭代策略实现切片融合匹配,从而提升激光里程计精度、效率与稳定性。此外,设计融合激光点云切片信息的因子图优化方法,通过对多层切片点云匹配结果进行融合投票,筛除错误结果并减少大量重复结构对回环检测的影响,并利用切片因子来构建因子图边,从而提升全局优化水平,实现高效稳定的三维重建。最后,通过Carla仿真场景以及武汉某大型集装箱港区的实际场景测试,证实了该方法的可行性和有效性。Abstract:
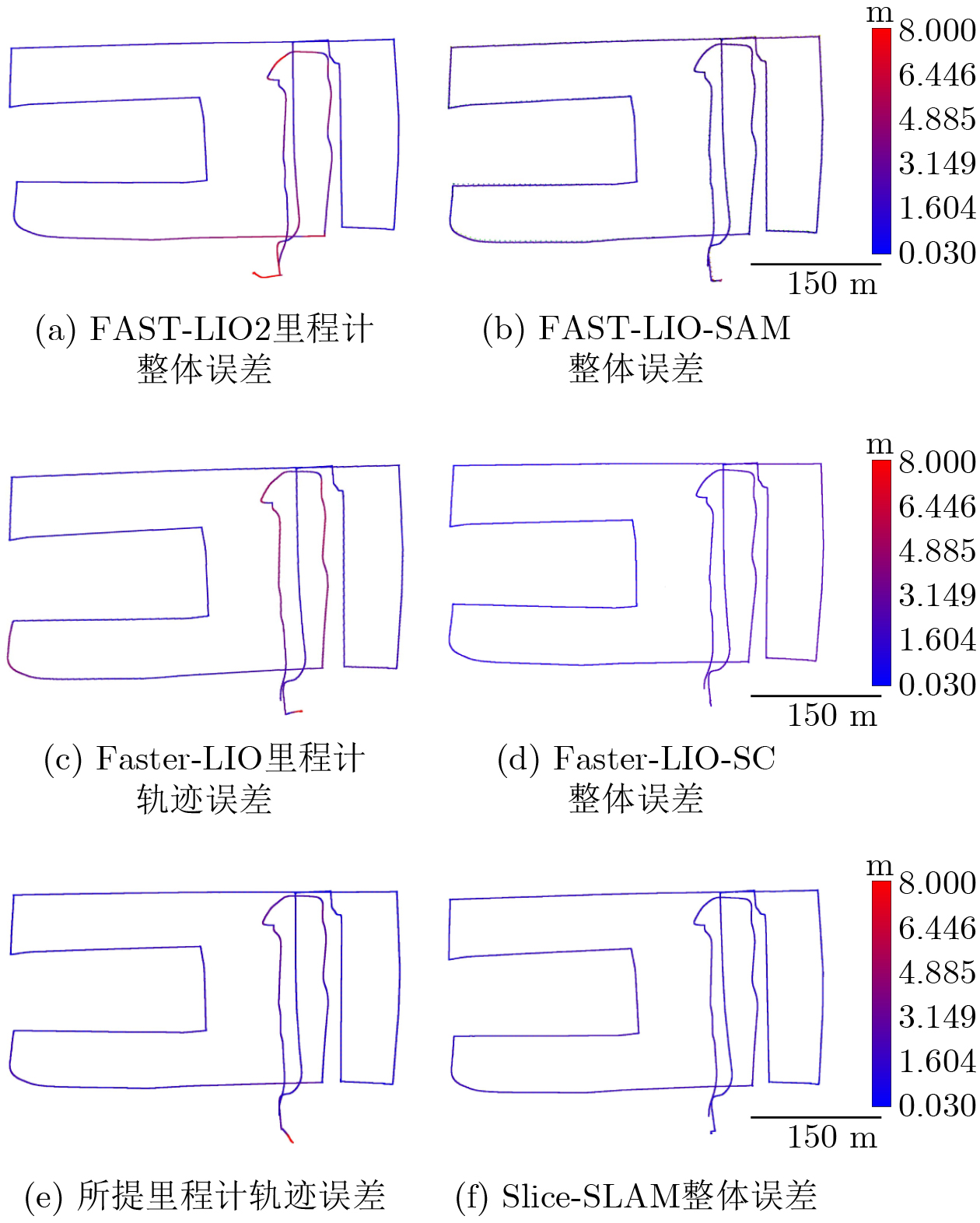
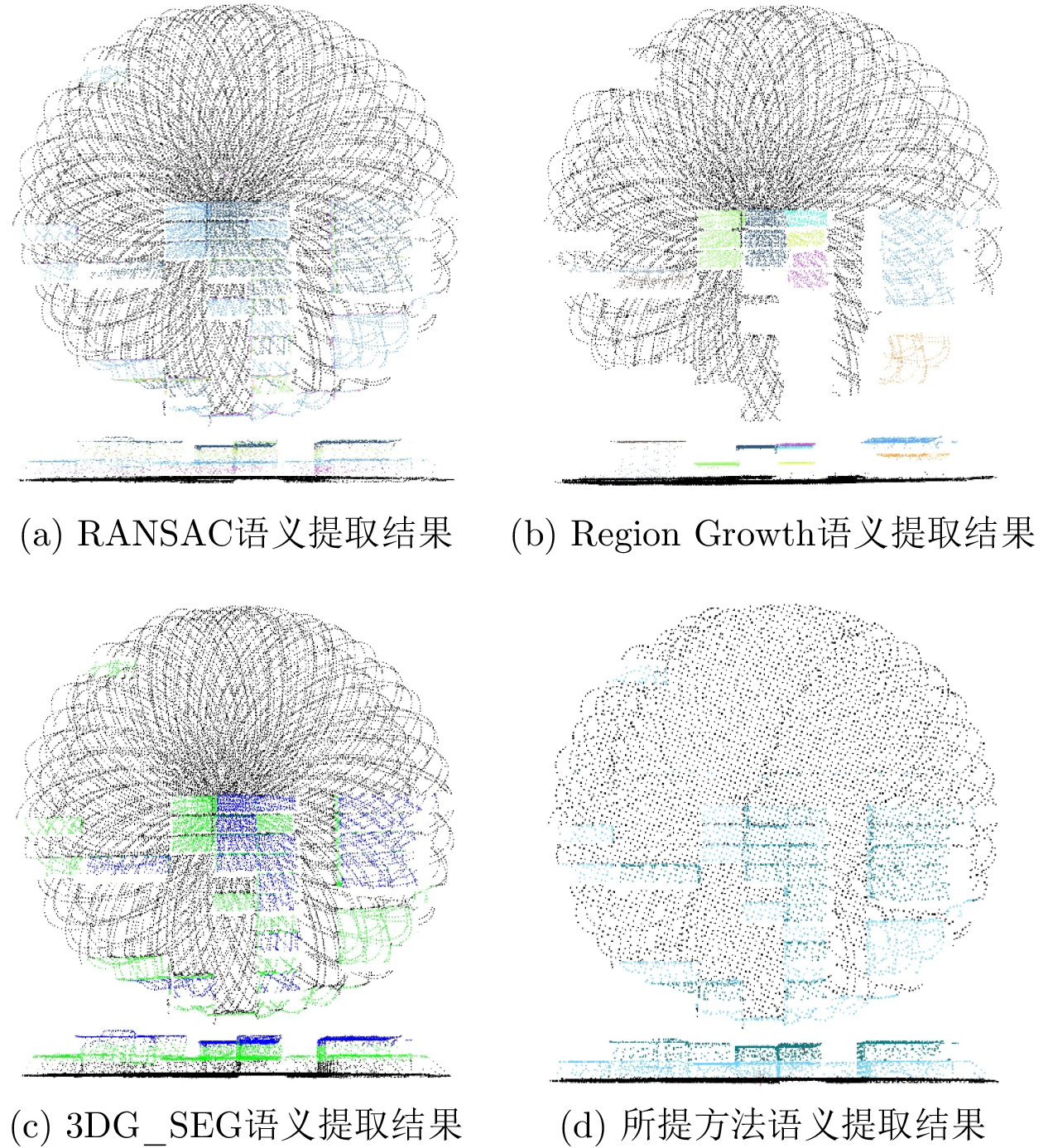
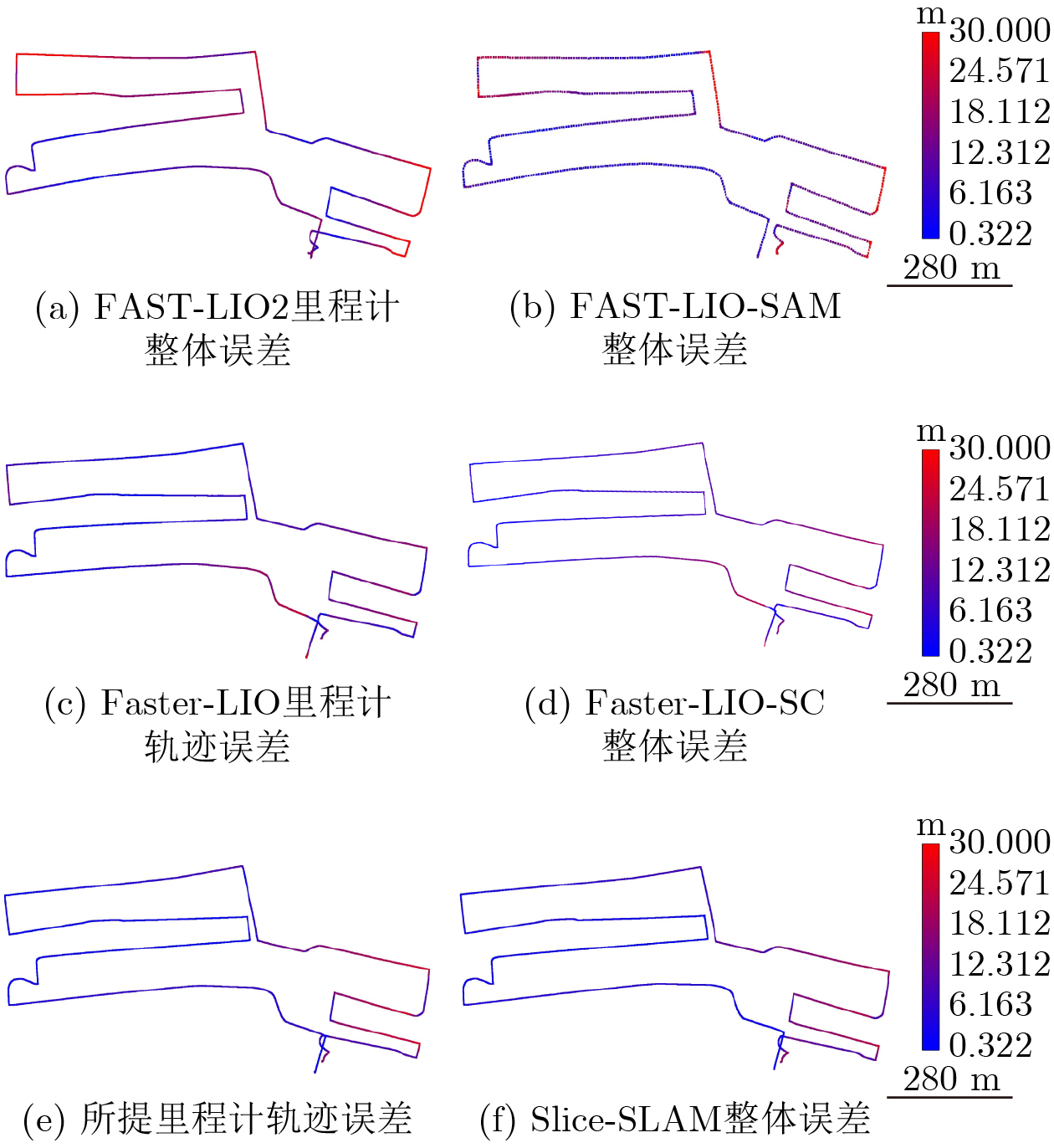
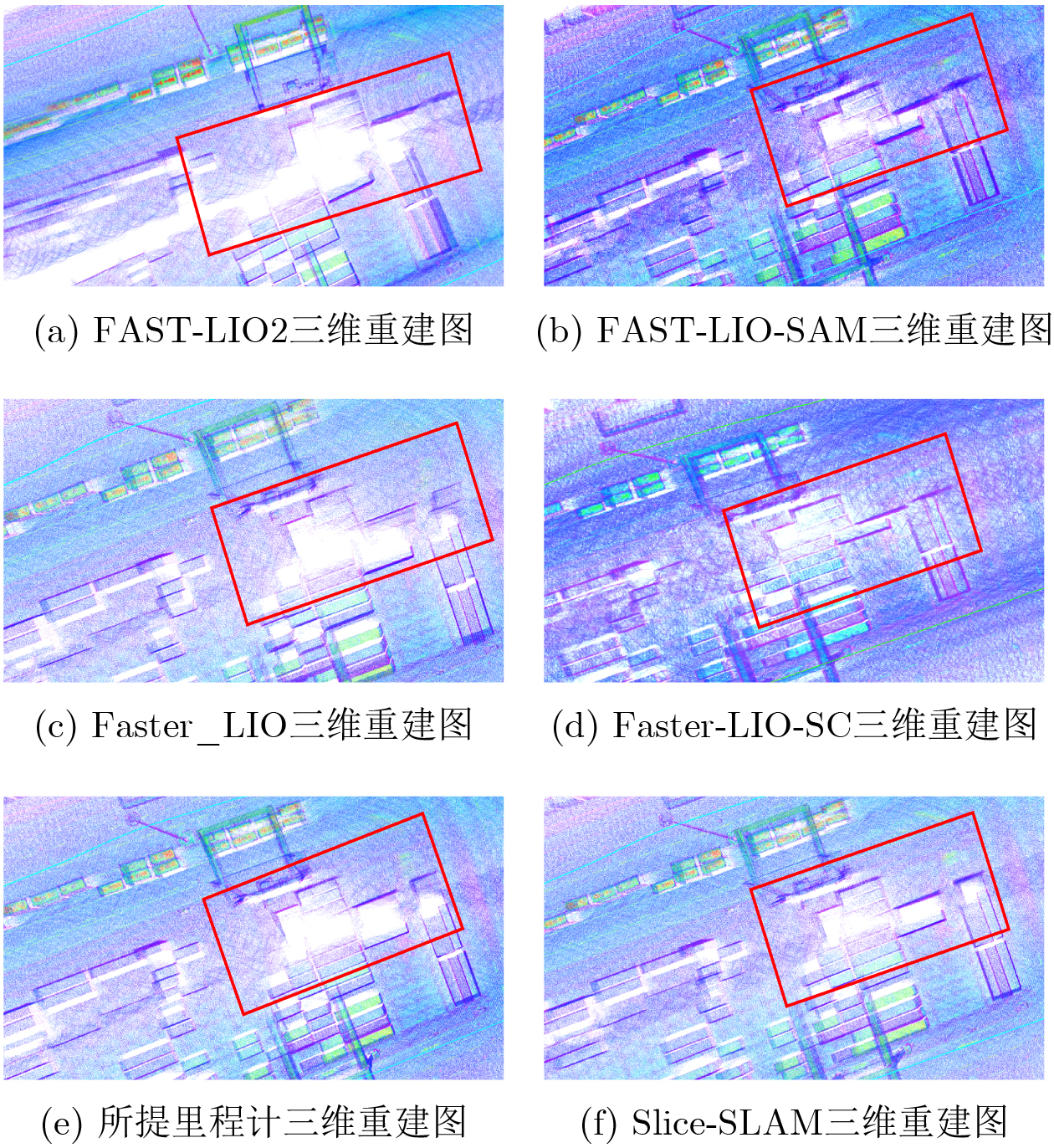
Objective With the continuous development of port intelligence, the demand for digital management in container port areas has increased. In large container yards, Three-Dimensional (3D) reconstruction of the yard environment can be achieved using Unmanned Aerial Vehicle (UAV)-based Simultaneous Localization And Mapping (SLAM). However, container port areas contain many repetitive semantic structures. Traditional semantic matching methods therefore show low efficiency and limited accuracy. In addition, lanes between container yards form large feature-sparse regions during UAV-based 3D reconstruction, which can cause odometry degradation. Repetitive scene features also interfere with loop closure detection. To address these problems, this paper proposes a rapid feature extraction method based on point cloud slicing and further optimizes it according to the structural characteristics of container yards. A UAV point cloud slice-based SLAM method, termed Slice-SLAM, is proposed for high-precision 3D reconstruction of large container port areas. Methods To improve point cloud semantic extraction, a rapid point cloud slicing method is proposed. The principal direction is extracted rapidly, and the point cloud is divided into multiple layers to obtain multi-layer semantic point clouds efficiently. The slicing strategy is further optimized for container yard scenarios. Principal plane extraction is simplified using the gravity direction, and the elevation range of each container layer is obtained adaptively from point cloud density gradient changes. Multi-layer slice point clouds are then constructed. A progressive adaptive Light Detection And Ranging (LiDAR) odometry method based on slice point clouds is developed. Elevation slices are used to identify degenerate scenarios adaptively, and a layer-wise incremental slice matching and fusion strategy is used. This improves the accuracy, efficiency, and stability of LiDAR odometry. In addition, a factor graph optimization method that integrates slice point cloud information is designed. Fusion voting is performed on the matching results of multi-layer slice point clouds to remove erroneous matches and reduce the effect of repetitive structures on loop closure detection. Slice factors are then used to construct factor graph edges, which improves global optimization and supports efficient and stable 3D reconstruction. Results and Discussions The feasibility and effectiveness of the proposed method are verified in CARLA simulation scenarios and real-world tests at a large container port in Wuhan. First, comparisons with three semantic extraction algorithms, namely RANSAC, Region Growth, and 3DG_SEG, demonstrate the efficiency and accuracy of the proposed semantic extraction method. Second, estimated trajectories are compared with those obtained by two open-source LiDAR algorithms, FAST-LIO2 and Faster-LIO, confirming the advantages of the proposed odometry method. Finally, speed and confidence score are compared with those of six algorithms: ICP, NDT, GICP, Fast-GICP, Scan Context+ICP, and Quatro. The loop closure detection module of LIO-SAM is also integrated into FAST-LIO2, and the Scan Context module is integrated into Faster-LIO. The resulting estimated trajectories are compared with those of the proposed method, verifying the effectiveness of the proposed loop closure detection algorithm. The proposed method achieves high 3D reconstruction accuracy and is suitable for practical port operations. Conclusions The proposed method uses an efficient point cloud slicing technique and a multi-layer slice matching mechanism. Points within the same elevation range are defined as a slice point cloud, and the segmentation process is defined as point cloud slicing. This design enables efficient and robust 3D reconstruction in large-scale scenes with repetitive features. First, the LiDAR point cloud is aligned with the positive Z-axis using the gravity direction derived from the Inertial Measurement Unit (IMU). A sliding window records density gradient changes to determine the elevation range of each layer adaptively. This simplifies point cloud slicing and reduces the effects of non-standard containers and ground height variations on semantic extraction. Multi-layer slice information is then integrated into the odometry module to detect degenerate scenarios. Under normal conditions, progressive slice matching is used to initialize pose estimation. In degenerate scenarios, iterative Kalman filtering with increased IMU weighting is used. Finally, the fusion voting mechanism removes outliers from multi-layer slice matching results. The optimal match is used to initialize loop closure for global registration of container-region point clouds, enabling dual-stage loop closure detection and slice factor construction. By integrating slice point cloud information into factor graph optimization, the proposed method unifies point clouds in a common coordinate system and achieves efficient and robust 3D reconstruction. -
表 1 实验参数表
参数 $ {\lambda } $ $ \alpha $ $ \beta $ $ {\delta }_{t} $ $ {\delta }_{\theta } $ 飞行高度 $ \tau $ 数值 0.85 0.6 0.4 0.02 0.017 100 m 0.04  下载: 导出CSV
下载: 导出CSV
表 3 轨迹精度对比(m)
场景 指标 方法 FAST-LIO2 Faster-LIO Slice-SLAM (无回环) FAST-LIO-SAM Faster-LIO-SC Slice-SLAM (有回环) 仿真场景 MAXE 29.043 15.884 13.025 6.487 3.502 3.173 MAE 2.625 1.999 1.672 1.846 1.472 1.401 RSME 3.842 1.445 1.131 0.730 0.656 0.632 HME 1.181 0.646 0.530 0.264 0.143 0.129 真实场景 MAXE 35.694 26.014 17.234 28.008 23.501 10.812 MAE 13.598 8.808 6.268 10.261 8.137 5.215 RSME 7.185 6.581 3.753 5.010 5.855 2.443 HME 0.972 0.708 0.469 0.763 0.639 0.294
下载: 导出CSV
表 2 语义提取运行效率(FPS)
方法 单帧帧率 3帧帧率 5帧帧率 RANSAC 14.388 11.990 10.010 Region Growth 5.376 1.001 0.529 3D_SEG 4.274 1.458 0.740 本文 211 112.104 62.893
下载: 导出CSV
表 4 语义提取运行效率(FPS)
方法 单帧帧率 5帧帧率 10帧帧率 RANSAC 9.215 8.456 7.450 Region Growth 1.993 0.722 0.345 3D_SEG 3.425 1.276 0.309 本文 206.267 95.950 32.660
下载: 导出CSV
表 5 回环检测结果对比
指标 方法 ICP NDT GICP Fast_GICP Quatro Scan_Context + ICP 本文 0~2 m 运行时间(s) 0.817271 0.735771 0.364556 0.336739 0.166818 0.422534 0.245286 置信分数 0.113421 0.513051 0.107523 0.115033 2.470698 0.111862 0.108105 4~6 m 运行时间(s) 0.760850 0.961706 0.379740 0.374925 0.169581 0.453751 0.250143 置信分数 0.129462 0.452106 0.117008 0.112414 2.587779 0.116497 0.110242 8~10 m 运行时间(s) 0.783931 0.863472 0.448796 0.333281 0.174932 0.465473 0.264625 置信分数 0.128523 0.581624 0.114952 0.114824 2.909427 0.114505 0.113278
下载: 导出CSV
-
[1] PARASKEVAS A, MADAS M, ZEIMPEKIS V, et al. Smart ports in industry 4.0: A systematic literature review[J]. Logistics, 2024, 8(1): 28. doi: 10.3390/logistics8010028. [2] SVISHCHEV N, LINO P, MAIONE G, et al. A comprehensive survey of advanced SLAM techniques[C]. E3S Web of Conferences, Almaty, Kazakhstan, 2024: 05004. doi: 10.1051/e3sconf/202454105004. [3] 胡钊政, 王书恒, 孟杰, 等. 基于路径似然模型与HMM序列匹配定位的地铁隧道三维重建[J]. 电子与信息学报, 2025, 47(7): 2273–2284. doi: 10.11999/JEIT241122.HU Zhaozheng, WANG Shuheng, MENG Jie, et al. 3D reconstruction of metro tunnel based on path likelihood model and HMM sequence matching localization[J]. Journal of Electronics & Information Technology, 2025, 47(7): 2273–2284. doi: 10.11999/JEIT241122. [4] AMJAD M, SAHIN ALI M, YAO Shouwen, et al. Self and target locating with cooperation of heterogeneous unmanned vehicles in the denial environment[J]. IEEE Access, 2025, 13: 64699–64718. doi: 10.1109/ACCESS.2025.3558873. [5] CHEN Shoubin, ZHOU Baoding, JIANG Changhui, et al. A LiDAR/visual SLAM backend with loop closure detection and graph optimization[J]. Remote Sensing, 2021, 13(14): 2720. doi: 10.3390/rs13142720. [6] GAO Ruizhen, LI Yuang, LI Baihua, et al. FELC-SLAM: Feature extraction and loop closure optimized LiDAR SLAM system[J]. Measurement Science and Technology, 2024, 35(11): 115112. doi: 10.1088/1361-6501/ad6e0c. [7] 余浩扬, 李艳生, 肖凌励, 等. 面向动态环境的巡检机器人轻量级语义视觉SLAM框架[J]. 电子与信息学报, 2025, 47(10): 3979–3992. doi: 10.11999/JEIT250301.YU Haoyang, LI Yansheng, XIAO Lingli, et al. A lightweight semantic visual simultaneous localization and mapping framework for inspection robots in dynamic environments[J]. Journal of Electronics & Information Technology, 2025, 47(10): 3979–3992. doi: 10.11999/JEIT250301. [8] CHOI S, CHAE H W, JEUNG Y, et al. Fast and versatile feature-based LiDAR odometry via efficient local quadratic surface approximation[J]. IEEE Robotics and Automation Letters, 2023, 8(2): 640–647. doi: 10.1109/LRA.2022.3227875. [9] QIAO Zhijian, YU Zehuan, JIANG Binqian, et al. G3Reg: Pyramid graph-based global registration using Gaussian ellipsoid model[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 3416–3432. doi: 10.1109/TASE.2024.3394519. [10] YAN Shaocheng, SHI Pengcheng, and LI Jiayuan. ML-SemReg: Boosting point cloud registration with multi-level semantic consistency[C]. 18th European Conference on Computer Vision – ECCV 2024, Milan, Italy, 2024: 19–37. doi: 10.1007/978-3-031-72784-9_2. [11] ZHANG R, SONG Jingwei, GAO Xiang, et al. RKHS-BA: A robust correspondence-free multi-view bundle adjustment framework for semantic point clouds[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025, 47(12): 10882–10899. doi: 10.1109/TPAMI.2025.3593521. [12] XU Yajun, ARAI S, LIU Diyi, et al. FPCC: Fast point cloud clustering-based instance segmentation for industrial bin-picking[J]. Neurocomputing, 2022, 494: 255–268. doi: 10.1016/j.neucom.2022.04.023. [13] QIAN Zhentian, FU Jie, and XIAO Jing. Towards accurate loop closure detection in semantic SLAM with 3D semantic covisibility graphs[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2455–2462. doi: 10.1109/LRA.2022.3145066. [14] LI Lin, XIN Kong, ZHAO Xiangrui, et al. SA-LOAM: Semantic-aided LiDAR SLAM with loop closure[C]. 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 2021: 7627–7634. doi: 10.1109/ICRA48506.2021.9560884. [15] MA Junyi, ZHANG Jun, XU Jintao, et al. OverlapTransformer: An efficient and yaw-angle-invariant transformer network for LiDAR-based place recognition[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6958–6965. doi: 10.1109/LRA.2022.3178797. [16] LEE D, JUNG M, YANG W, et al. Lidar odometry survey: Recent advancements and remaining challenges[J]. Intelligent Service Robotics, 2024, 17(2): 95–118. doi: 10.1007/s11370-024-00515-8. [17] KAESS M, JOHANNSSON H, ROBERTS R, et al. iSAM2: Incremental smoothing and mapping with fluid relinearization and incremental variable reordering[C]. 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 2011: 3281–3288. doi: 10.1109/ICRA.2011.5979641. [18] FISCHLER M A and BOLLES R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381–395. doi: 10.1145/358669.358692. [19] RABBANI T, VAN DEN HEUVEL F, and VOSSELMANN G. Segmentation of point clouds using smoothness constraint[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2006, 36(5): 248–253. [20] ZERMAS D, IZZAT I, and PAPANIKOLOPOULOS N. Fast segmentation of 3D point clouds: A paradigm on LiDAR data for autonomous vehicle applications[C]. 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, Singapore, 2017: 5067–5073. doi: 10.1109/ICRA.2017.7989591. [21] XU Wei, CAI Yixi, HE Dongjiao, et al. FAST-LIO2: Fast direct LiDAR-inertial odometry[J]. IEEE Transactions on Robotics, 2022, 38(4): 2053–2073. doi: 10.1109/TRO.2022.3141876. [22] BAI Chunge, XIAO T, CHEN Yajie, et al. Faster-LIO: Lightweight tightly coupled LiDAR-inertial odometry using parallel sparse incremental voxels[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4861–4868. doi: 10.1109/LRA.2022.3152830. [23] KIM G and KIM A. Scan Context: Egocentric spatial descriptor for place recognition within 3D point cloud map[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018: 4802–4809. doi: 10.1109/IROS.2018.8593953. [24] LIM H, KIM B, KIM D, et al. Quatro++: Robust global registration exploiting ground segmentation for loop closing in LiDAR SLAM[J]. The International Journal of Robotics Research, 2024, 43(5): 685–715. doi: 10.1177/02783649231207654. [25] Low K L. Linear least-squares optimization for point-to-plane icp surface registration[J]. Chapel Hill, University of North Carolina, 2004, 4(10): 1-3. ) [26] SRINARA S, LEE C M, TSAI S, et al. Performance analysis of 3D NDT scan matching for autonomous vehicles using INS/GNSS/3D LiDAR-SLAM integration scheme[C]. 2021 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kailua-Kona, USA, 2021: 1–4. doi: 10.1109/INERTIAL51137.2021.9430476. [27] SEGAL A V, HAEHNELl D, and THRUN S. Generalized-ICP[J]. Robotics: Science and Systems, 2009, 2(4): 1–8. doi: 10.7551/mitpress/8727.001.0001. [28] KOIDE K, YOKOZUKA M, OISHI S, et al. Voxelized GICP for fast and accurate 3D point cloud registration[C]. 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 2021: 11054–11059. doi: 10.1109/ICRA48506.2021.9560835. -


 下载:
下载:


图(13) / 表(5)
计量
- 文章访问数: 261
- HTML全文浏览量: 97
- PDF下载量: 17
- 被引次数: 0
