

Baseband Modulation Signal Generation and Phase Synchronization Method of Space High Speed Optical Communication
-
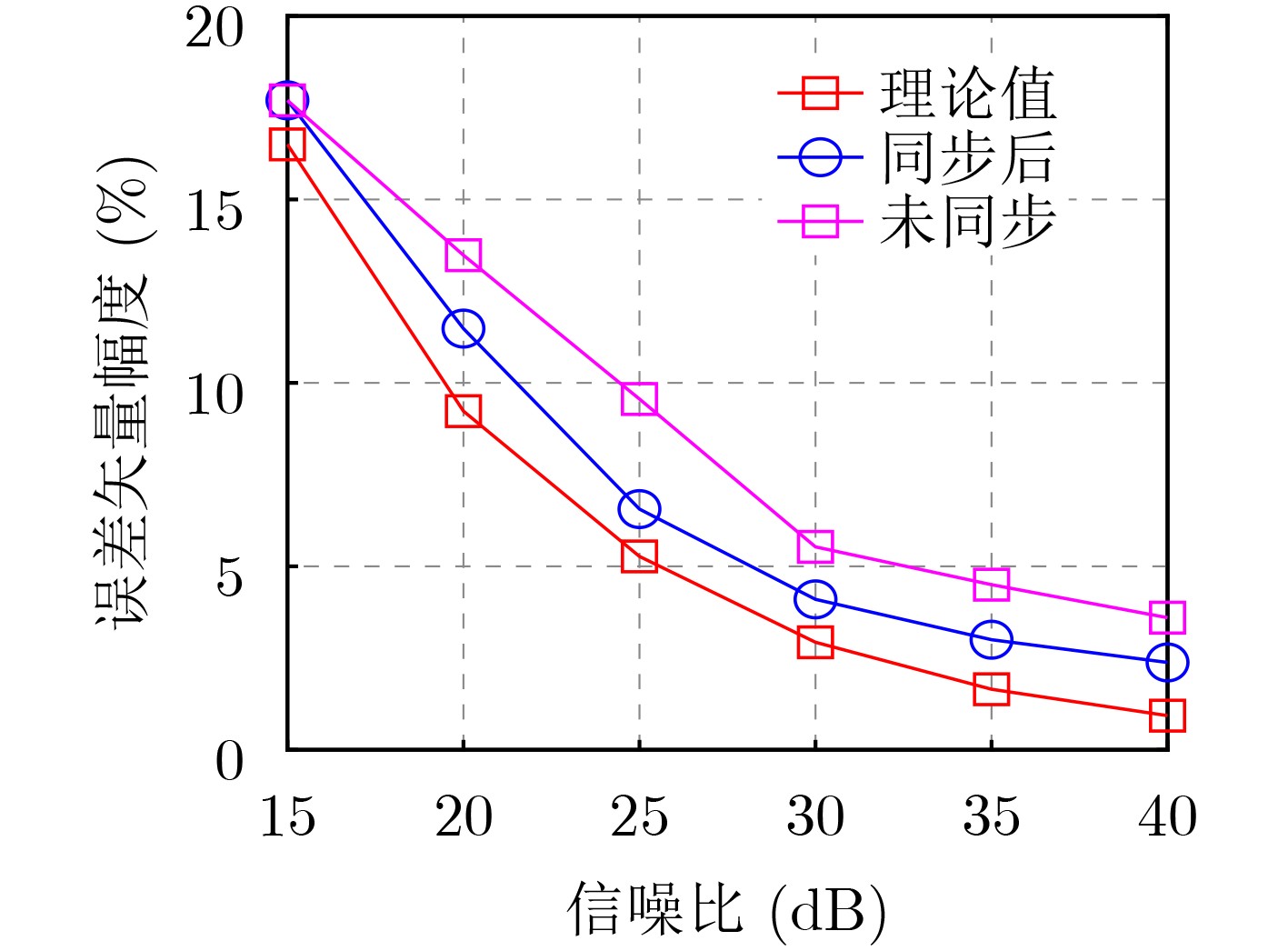
摘要: 高速调制基带信号的高质量产生与相位精确同步是实现空间光通信测距的关键技术。传统采用FPGA或数字信号处理器(DSP)与高速数模转换器 (DAC)的实现方法,存在相位同步精度低、硬件实现复杂度高等缺点。该文提出一种高速光通信基带信号产生与相位同步方法,设计了相位闭环动态控制环路,通过实时调整高速信号发射时钟相位,可实现I,Q高速基带信号相位与外部参考时钟相位的确定性关系。实验结果表明:正交相移键控(QPSK)光调制信号码速率为5 Gbit/s时,相位同步精度小于2 ps,误差矢量幅度(EVM)小于8% ;5 Gbit/s光通信速率误码率为10–7,接收灵敏度优于–47 dBm,测距精度优于2 mm。与传统方法相比,其灵敏度与测距精度均得到明显改善。Abstract: The high-quality generation and precise phase synchronization of high-speed modulated baseband signals are key technologies of space optical communication ranging system. Traditional approaches relying on FPGA or Digital Signal Processor (DSP) and high-speed Digital to Analog Convertor (DAC) technology often suffer from limited phase synchronization accuracy and high hardware complexity. A method for high-speed optical communication baseband signal generation and phase synchronization is proposed and a phase-locked dynamic control loop is designed in this paper. By dynamically adjusting the phase of the high-speed signal transmission clock in real time, the deterministic relationship between the I/Q high-speed baseband signal phase and the external reference clock phase can be achieved. The experimental results demonstrate impressive performance metrics: When the code rate of the Quadrature Phase Shift Keying (QPSK) optical modulated signal is 5 Gbit/s, the phase synchronization accuracy is less than 2 ps and the Error Vector Magnitude (EVM) is less than 8%; the bit error rate is 10–7 at a 5 Gbit/s optical communication rate, the receiver sensitivity is better than –47 dBm, and the ranging accuracy is better than 2 mm. Compared with traditional methods, both sensitivity and ranging accuracy are significantly improved.
-
[1] IDRIS S, SELMY H, and LOPES W T A. Performance analysis of hybrid MPAPM technique for deep-space optical communications[J]. IET Communications, 2021, 15(13): 1700–1709. doi: 10.1049/cmu2.12182. [2] WANG Qiang, ZHAO Guoqiang, MA Jing, et al. Demonstration and verification experiment in deep space optical communications[J]. Optics Communications, 2022, 507: 127605. doi: 10.1016/j.optcom.2021.127605. [3] 李宝龙, 施建锋, 吴勤勤, 等. 可见光通信中融合VOOK和分层OFDM的高效频谱混合调制方法[J]. 电子与信息学报, 2022, 44(8): 2639–2648. doi: 10.11999/JEIT220368.LI Baolong, SHI Jianfeng, WU Qinqin, et al. Spectrum-efficient hybrid modulation based on VOOK and layered OFDM for visible light communications[J]. Journal of Electronics & Information Technology, 2022, 44(8): 2639–2648. doi: 10.11999/JEIT220368. [4] GUIOMAR F P, FERNANDES M A, NASCIMENTO J L, et al. Coherent free-space optical communications: Opportunities and challenges[J]. Journal of Lightwave Technology, 2022, 40(10): 3173–3186. doi: 10.1109/JLT.2022.3164736. [5] LI Kangning, LIN Bo, and MA Jing. DPSK modulated multiple apertures receiver system for satellite-to-ground heterodyne optical communication[J]. Optics Communications, 2020, 454: 124466. doi: 10.1016/j.optcom.2019.124466. [6] BHOWAL A and KSHETRIMAYUM R S. Advanced optical spatial modulation techniques for FSO communication[J]. IEEE Transactions on Communications, 2021, 69(2): 1163–1174. doi: 10.1109/TCOMM.2020.3035400. [7] 肖尚辉, 刘简, 胡波, 等. 基于低采样率数模转换器和模数转换器的太赫兹发射机线性化[J]. 电子与信息学报, 2023, 45(2): 718–724. doi: 10.11999/JEIT211304.XIAO Shanghui, LIU Jian, HU Bo, et al. Linearization of terahertz transmitter based on low sampling rate DAC and ADC[J]. Journal of Electronics & Information Technology, 2023, 45(2): 718–724. doi: 10.11999/JEIT211304. [8] WANG Feng, HU Guijun, DU Te, et al. Performance research of mPPM-QPSK modulation signal for free space optical communication[J]. Optics Communications, 2020, 457: 124646. doi: 10.1016/j.optcom.2019.124646. [9] 吕红亮. 基于JESD204B接口DAC的任意波形发生模块同步性分析及验证[D]. [硕士论文], 电子科技大学, 2021. doi: 10.27005/d.cnki.gdzku.2021.002538.LV Hongliang. Synchronization analysis and verification of arbitrary waveform generator module based on DAC using JESD204B interface[D]. [Master dissertation], University of Electronic Science and Technology of China, 2021. doi: 10.27005/d.cnki.gdzku.2021.002538. [10] 符献杰. 10GSPS双通道任意波形合成模块硬件设计与实现[D]. [硕士论文], 电子科技大学, 2022. doi: 10.27005/d.cnki.gdzku.2022.002972.FU Xianjie. Hardware design and implementation of dual channel arbitrary waveform synthesizer with 10GSPS[D]. [Master dissertation], University of Electronic Science and Technology of China, 2022. doi: 10.27005/d.cnki.gdzku.2022.002972. [11] 赵贺, 张鹏, 杨志群, 等. 多调制格式兼容的空间激光高速通信调制仿真与实验研究[J]. 中国激光, 2022, 49(7): 0706004. doi: 10.3788/CJL202149.0706004.ZHAO He, ZHANG Peng, YANG Zhiqun, et al. Simulation and experimental research of multimodulation format compatible space laser high-speed communication modulation[J]. Chinese Journal of Lasers, 2022, 49(7): 0706004. doi: 10.3788/CJL202149.0706004. [12] 高铎瑞, 谢壮, 马榕, 等. 卫星激光通信发展现状与趋势分析(特邀)[J]. 光子学报, 2021, 50(4): 0406001. doi: 10.3788/gzxb20215004.0406001.GAO Duorui, XIE Zhuang, MA Rong, et al. Development current status and trend analysis of satellite laser communication (Invited)[J]. Acta Photonica Sinica, 2021, 50(4): 0406001. doi: 10.3788/gzxb20215004.0406001. [13] 李宗霖. 一种新型高精度DAC的研究与设计[D]. [硕士论文], 电子科技大学, 2022. doi: 10.27005/d.cnki.gdzku.2022.002996.LI Zonglin. Research and design of a novel high precision DAC[D]. [Master dissertation], University of Electronic Science and Technology of China, 2022. doi: 10.27005/d.cnki.gdzku.2022.002996. [14] Xilinx. UltraScale architecture GTY transceivers[EB/OL]. http://docs.xilinx.com/v/u/en-US/ug578-ultrascale-gty-transceivers, 2021. [15] GEORGIADIS A. Gain, phase imbalance, and phase noise effects on error vector magnitude[J]. IEEE Transactions on Vehicular Technology, 2004, 53(2): 443–449. doi: 10.1109/TVT.2004.823477. [16] TAN Xiaoheng and LI Tengjiao. EVM simulation and analysis in digital transmitter[J]. The Journal of China Universities of Posts and Telecommunications, 2009, 16(6): 43–48. doi: 10.1016/S1005-8885(08)60287-3. [17] Xilinx. UltraScale architecture GTH transceivers[EB/OL]. http://docs.xilinx.com/v/u/en-US/ug576-ultrascale-gth-transceivers, 2021. -

 下载:
下载:












图(15)
计量
- 文章访问数: 1609
- HTML全文浏览量: 637
- PDF下载量: 162
- 被引次数: 0
