| Citation: | Tongjun WANG, Feng WU, Wei XU. A Novel Imaging Approach for Improving Azimuth Angular Resolution of Automotive Radars[J]. Journal of Electronics & Information Technology, 2020, 42(8): 2037-2044. doi: 10.11999/JEIT190618

|
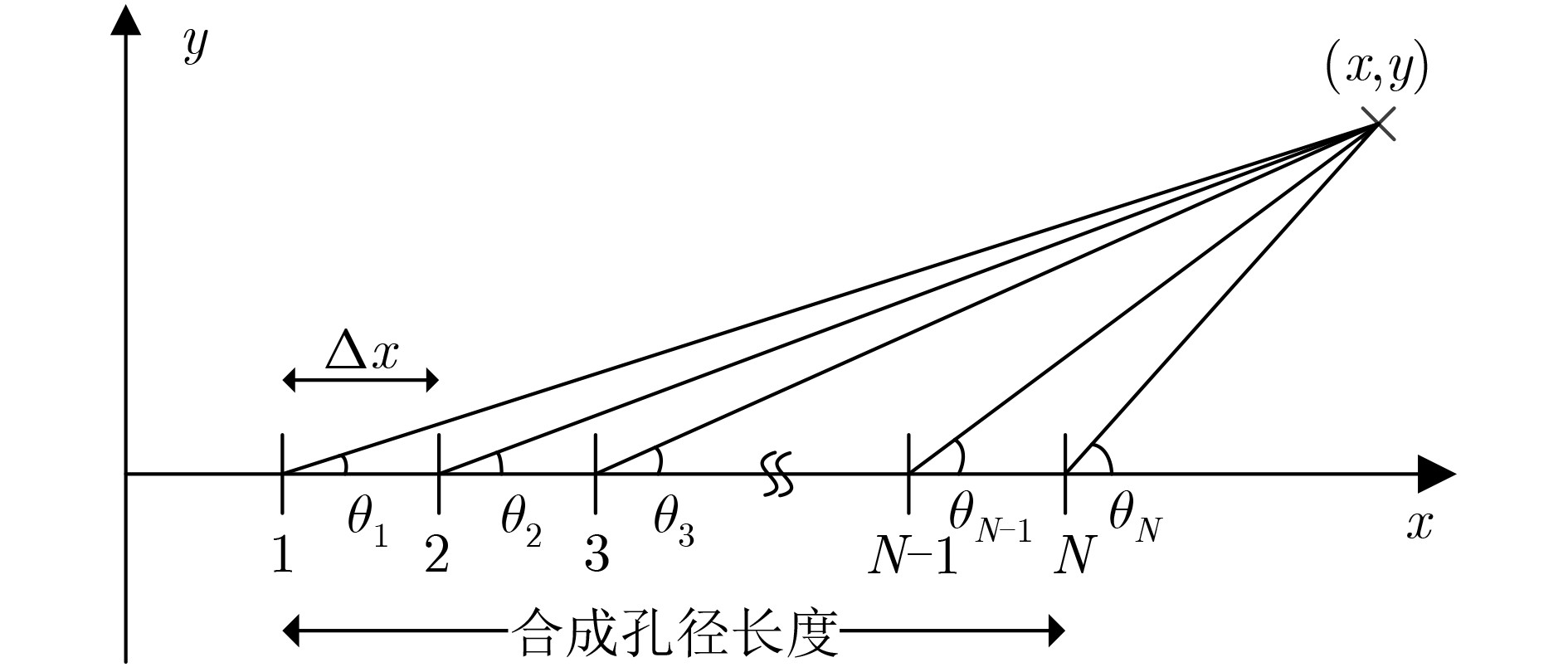
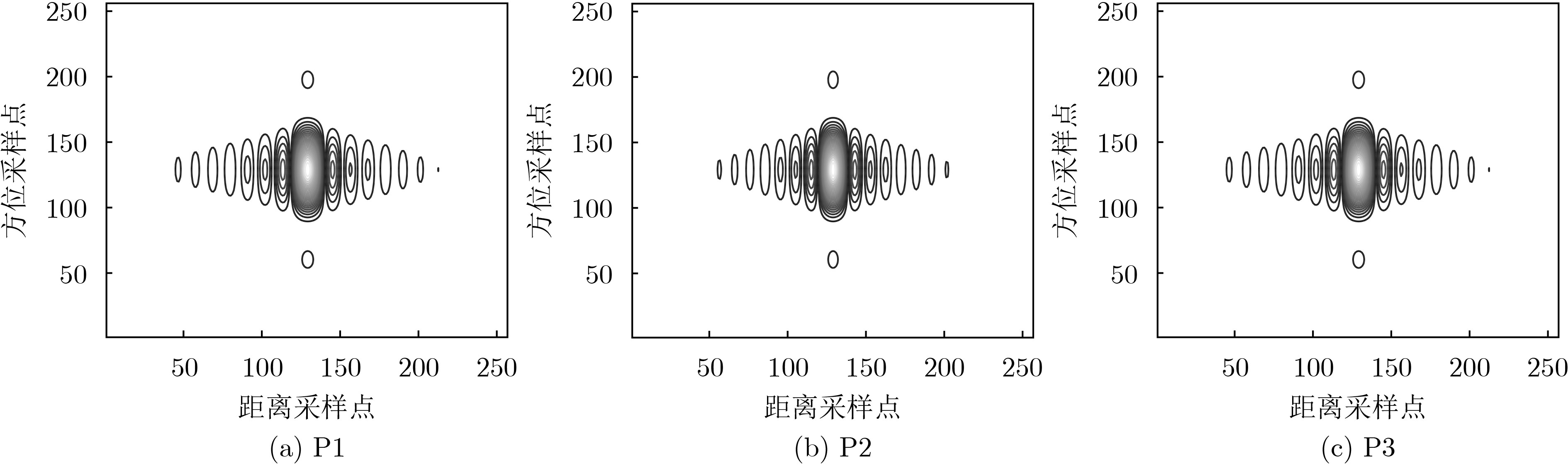
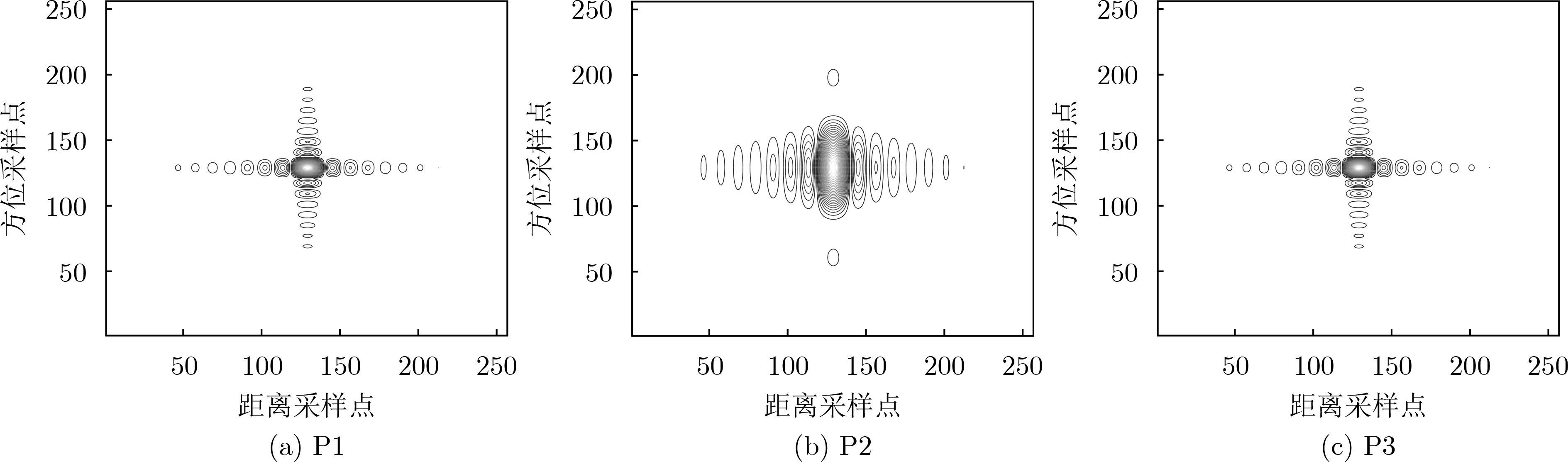
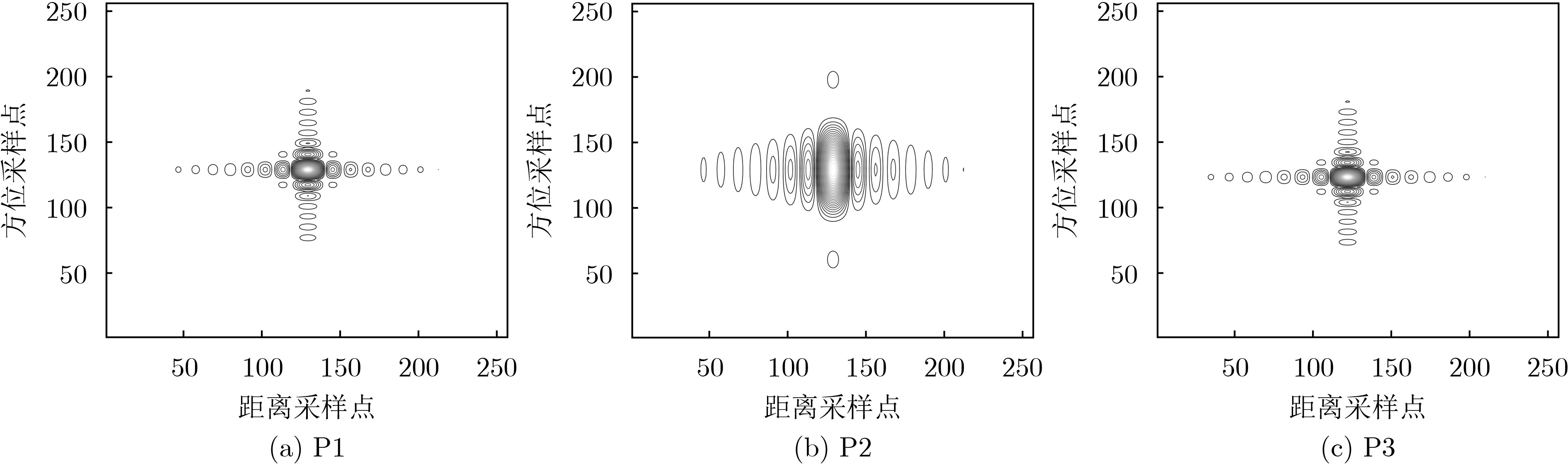
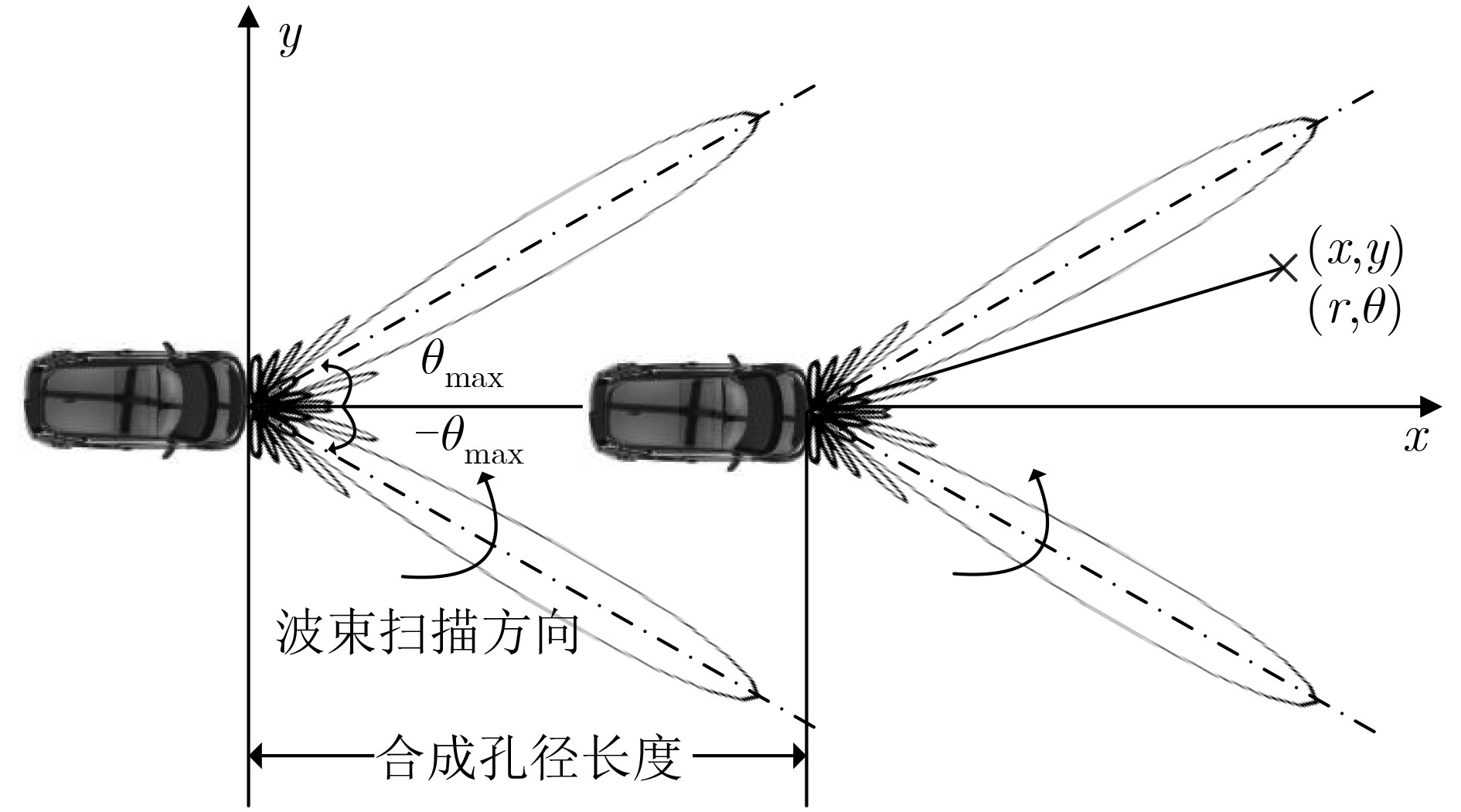
As the azimuth angular resolution is limited by the antenna length in automotive radars, a novel imaging approach for improving azimuth angular resolution of automotive radars is proposed based on multi-beam real-aperture radar images combination processing. Firstly, the antenna beam of the phased array antenna is electronically scanned to obtain forward-looking real-aperture radar images. Afterwards, multiple real-aperture radar images are coherent accumulated according to the imaging geometry of automotive radar to improve azimuth angular resolution. Simulation results validate the proposed imaging approach to improve the azimuth angular resolution of automotive radar.

|
XU Zhihuo, SHI Quan, SUN Ling, et al. Novel orthogonal random phase-coded pulsed radar for automotive application[J]. Journal of Radars, 2018, 7(3): 364–375. doi: 10.12000/JR17083
|
|
PATOLE S M, TORLAK M, WANG Dan, et al. Automotive radars: A review of signal processing techniques[J]. IEEE Signal Processing Magazine, 2017, 34(2): 22–35. doi: 10.1109/MSP.2016.2628914
|
|
KRONAUGE M and ROHLING H. New chirp sequence radar waveform[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2870–2877. doi: 10.1109/TAES.2014.120813
|
|
TAK J, JEONG E, and CHOI J. Metamaterial absorbers for 24-GHz automotive radar applications[J]. Journal of Electromagnetic Waves and Applications, 2017, 31(6): 577–593. doi: 10.1080/09205071.2017.1297257
|
|
GUO Kunyi, HOARE E G, JASTEH D, et al. Road edge recognition using the stripe hough transform from millimeter-wave radar images[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 825–833. doi: 10.1109/TITS.2014.2342875
|
|
MAO Xuesong, INOUE D, MATSUBARA H, et al. Demonstration of in-car doppler laser radar at 1.55 μm for range and speed measurement[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 599–607. doi: 10.1109/TITS.2012.2230325
|
|
LEE J E, LIM H S, JEONG S H, et al. Enhanced iron-tunnel recognition for automotive radars[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4412–4418. doi: 10.1109/TVT.2015.2460992
|
|
KELLNER D, BARJENBRUCH M, KLAPPSTEIN J, et al. Tracking of extended objects with high-resolution Doppler radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(5): 1341–1353. doi: 10.1109/TITS.2015.2501759
|
|
WANG Xiao, XU Linhai, SUN Hongbin, et al. On-road vehicle detection and tracking using MMW radar and monovision fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2075–2084. doi: 10.1109/TITS.2016.2533542
|
|
WANG H N, HUANG Yingwei, and CHUN S J. Spatial diversity 24-GHz FMCW radar with ground effect compensation for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 965–973. doi: 10.1109/TVT.2016.2565608
|
|
ASKELAND S A and EKMAN T. Tracking with a high-resolution 2D spectral estimation based automotive radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2418–2423. doi: 10.1109/TITS.2015.2407571
|
|
LEE M S and KIM Y H. Design and performance of a 24-GHz switch-antenna array FMCW radar system for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2010, 59(5): 2290–2297. doi: 10.1109/TVT.2010.2045665
|
|
HU Chenxi, LIU Yimin, MENG Huadong, et al. Randomized switched antenna array FMCW radar for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2014, 63(8): 3624–3641. doi: 10.1109/TVT.2014.2308895
|
|
保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005: 169–170.
BAO Zheng, XING Mengdao, and WANG Tong. Radar Imaging Technology[M]. Beijing: Publishing House of Electronics Industry, 2005: 169–170.
|
|
DEVADITHYA S, PEDROSS-ENGEL A, WATTS C M, et al. GPU-accelerated enhanced resolution 3-D SAR imaging with dynamic metamaterial antennas[J]. IEEE Transactions on Microwave Theory and Techniques, 2017, 65(12): 5096–5103. doi: 10.1109/TMTT.2017.2766060
|
|
CHANG W Y, WU Mengche, CHANG Yanglang, et al. GPU acceleration of adaptive local kriging applied to retrieving slant-range surface motion maps[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(11): 4317–4325. doi: 10.1109/JSTARS.2018.2871877
|
|
WIJAYASIRI A, BANERJEE T, RANKA S, et al. Dynamic data-driven SAR image reconstruction using multiple GPUs[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(11): 4326–4338. doi: 10.1109/JSTARS.2018.2873198
|
Figures(10) / Tables(2)



 DownLoad:
DownLoad: