图
1
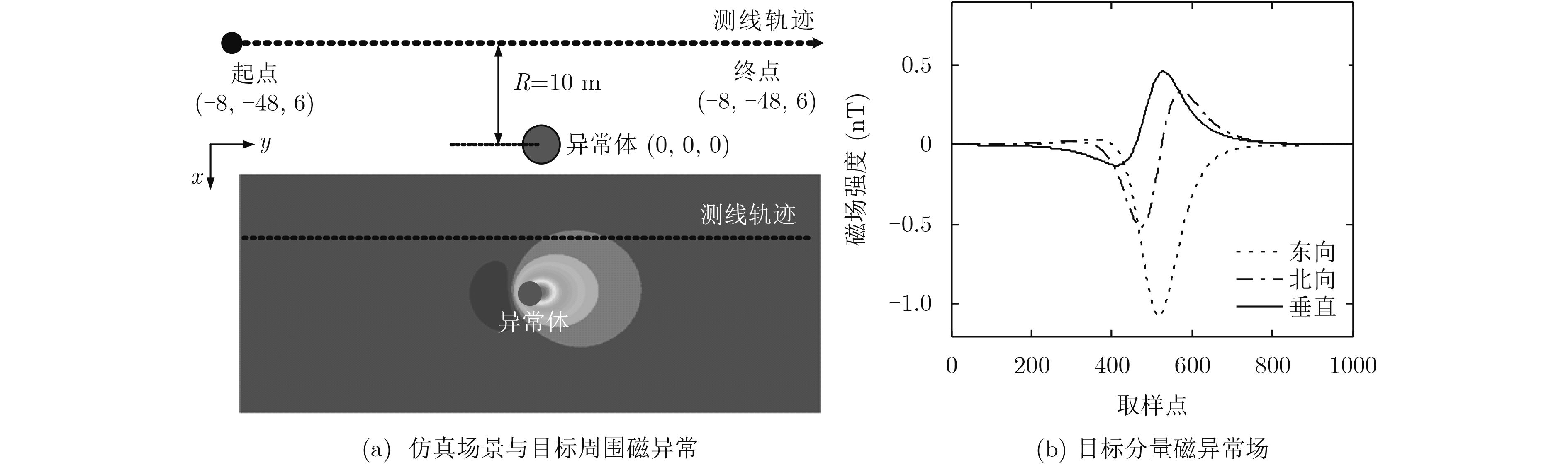
仿真场景与目标磁异常
| Citation: | Luzhao CHEN, Wanhua ZHU, Peilin WU, Chunjiao FEI, Guangyou FANG. Magnetic Anomaly Detection Algorithm Based on Fractal Features in Geomagnetic Background[J]. Journal of Electronics & Information Technology, 2019, 41(2): 332-340. doi: 10.11999/JEIT180307

|
Magnetic Anomaly Detection (MAD) is a widely used passive target detection method. Its applications include surface warship target monitoring, underwater moving targets, and land target detection and identification. It is of great significance to research on the reliability detection method of weak magnetic anomaly signals based on geomagnetic background. This paper proposes a single sensor detection method based on the fractal characteristics of target magnetic anomaly signal based on the study of the differences in geomagnetic background and fractal characteristics of magnetic anomaly signals and conducts actual field test verification. The experimental results show that the method can accurately distinguish the geomagnetic background interference and magnetic anomaly signals, and can detect the weak magnetic anomaly signals in the geomagnetic background noise.
磁异常探测(MAD)在军事与民用方面都有着广泛的应用,具体包括水面船舰目标监测、水下运动目标检测与识别、掩藏目标勘察、矿物勘探、考古等多个领域[1–6]。在实际工程应用中,磁异常探测的难点在于弱磁异常信号的检测容易受到背景磁场的干扰。为了提升弱磁异常信号的检测能力,国内外很多学者都进行多方面的尝试。Keiich[7]提出利用自适应权重函数检测磁异常的方法,视为正交基检测磁异常的雏形。Ginzburg等人[8]提出基于标准匹配正交基检测算法,该算法在假设背景为高斯白噪声时,可以获得最优的检测性能。此后,国内外众多学者在匹配正交基检测方法基础上,结合小波等方法对其改进,提升了匹配正交基检测算法的应用适用性[9–12]。然而,匹配正交基检测算法最佳检测需要满足以下两个基本条件:(1)目标磁异常满足磁偶极子模型;(2)目标与传感器之间相对运动满足匀速或者匀变速运动。这些限制条件制约了匹配正交基检测算法的优势。为了提升静止传感器对任意运动运动目标的检测性能,Arie Sheinker等人[13–16]在2008~2012年间提出利用熵滤波器、正交基主分量检测、高阶交叉检测磁异常等方法,这些方法在一定环境下可以取得良好的检测性能,然而对于复杂地磁背景环境下弱磁异常信号的检测仍存在有较大的检测难度。此外,文献[2]和文献3]针对港口入侵目标检测进行了一系列的实验,并提出利用支持向量机等机器学习方法进行磁异常的识别与检测,具有良好的检测性能[2,3,17–19]。然而,机器学习的方法需要大量的训练样本,这对于复杂环境下磁异常检测的应用带来实际上的操作难度。
本文通过分析地磁背景与磁异常信号的分形特征差异,提出利用磁场信号分形维数检测磁异常的方法,该方法能够区分复杂的背景磁场与磁异常信号,并可以实现弱磁异常信号的检测。
1967年,Mandelbrot发表了题为《英国的海岸线有多长?统计自相似和分数维度》的著名论文,指出不能从形状和结构上区分这部分海岸与那部分海岸有什么本质的不同,说明海岸线在形貌上是自相似的,也就是局部形态和整体态的相似。事实上,具有自相似性的形态广泛存在于自然界中,如:连绵的山川、飘浮的云朵、粒子的布朗运动等。Mandelbrot把这些部分与整体以某种方式相似的形体称为分形。1975年,Mandelbrot创立了分形几何学。分形目标检测就是从复杂背景信号中准确地检测所需要的目标信号,分形特征参数对于自然背景和人造目标存在着本质差别,为目标信号的检测提供一种思路。分形维数是分形理论中定量刻画分形特征的主要参数。
分形维数可以是分数值,也可以是整数值,它是分形几何对象的一个重要特征量,并有多种定义和计算方法。常用的有Hausdorf维数、盒维数、信息维数、广义维数等。Hausdorff维数[20,21]是在Hausdorff测度基础上定义的,是多种分形维数中最基础的,Hausdorff维数只适用于分形几何的理论推导,只能通过分析的方法获得小部分规则的纯数学分形的Hausdorff维数,而在大多情况下并不具有实用性。基于此,学者们研究并提出了更加切合实际的计算方法,如盒维数[21]。虽然这些计算方法存在着某些缺陷,但由于易于进行程序化计算,所以得到理论与应用工作者的广泛关注。大多数集合的盒维数与Hausdorff维数都是等价的,而且其计算简便,因此应用广泛。本文仅介绍盒维数。
盒维数(box dimension)顾名思义为非空盒子数目,其定义如下:设
| DB=limε→0(log2Nε(F))/(−log2(ε)) | (1) |
目标中的铁磁体在地磁场中感应磁矩及自身的永久磁矩共同表现为目标总磁矩。目标可以看为独立的磁源,该磁性目标产生的磁场叠加于背景地磁场,导致周围的地磁场发生局部畸变。探测距离较近时,磁性目标可等效为若干个偶极子源的叠加,目标产生的磁场与目标体的材料、形状等有关;当探测距离大于目标尺寸的3倍以上时,目标体可等效为磁偶极子,磁偶极子矢量磁场表达式如式(2):
| {{B}}\left( {{{m}},{{r}}} \right) = \frac{{{\mu _0}}}{{4{{π}} }}\frac{{3\left( {{{r}} \cdot {{m}}} \right){{r}} - {r^2}{{m}}}}{{{r^5}}} | (2) |
其中,
在地磁场中磁性目标周围的矢量磁场可以表示为地磁场与目标磁异常矢量场之和。
| {{{B}}_m} = {{B}} + {{{B}}_E} | (3) |
其中,
| \left\| {{{{B}}_m}} \right\| = \sqrt {{{\left\| {{{{B}}_E}} \right\|}^2} + 2{{B}} \cdot {{{B}}_E} + {{\left\| {{B}} \right\|}^2}} | (4) |
当目标磁异常远小于地磁场时,式(4)可化简为:
| \left\| {{{{B}}_m}} \right\| \!\cong \! \left\| {{{{B}}_E}} \right\|\sqrt {1 \!+\! 2\frac{{{{B}} \cdot {{{B}}_E}}}{{{{\left\| {{{{B}}_E}} \right\|}^2}}}} \! \cong \!\left\| {{{{B}}_E}} \right\| \!+\! \frac{{{{B}} \cdot {{{B}}_E}}}{{\left\| {{{{B}}_E}} \right\|}} | (5) |
因此,标量磁场传感器测量的信号为地磁场和目标磁场在地磁场方向上投影信号的叠加。
以张北县某地(经度:114°39
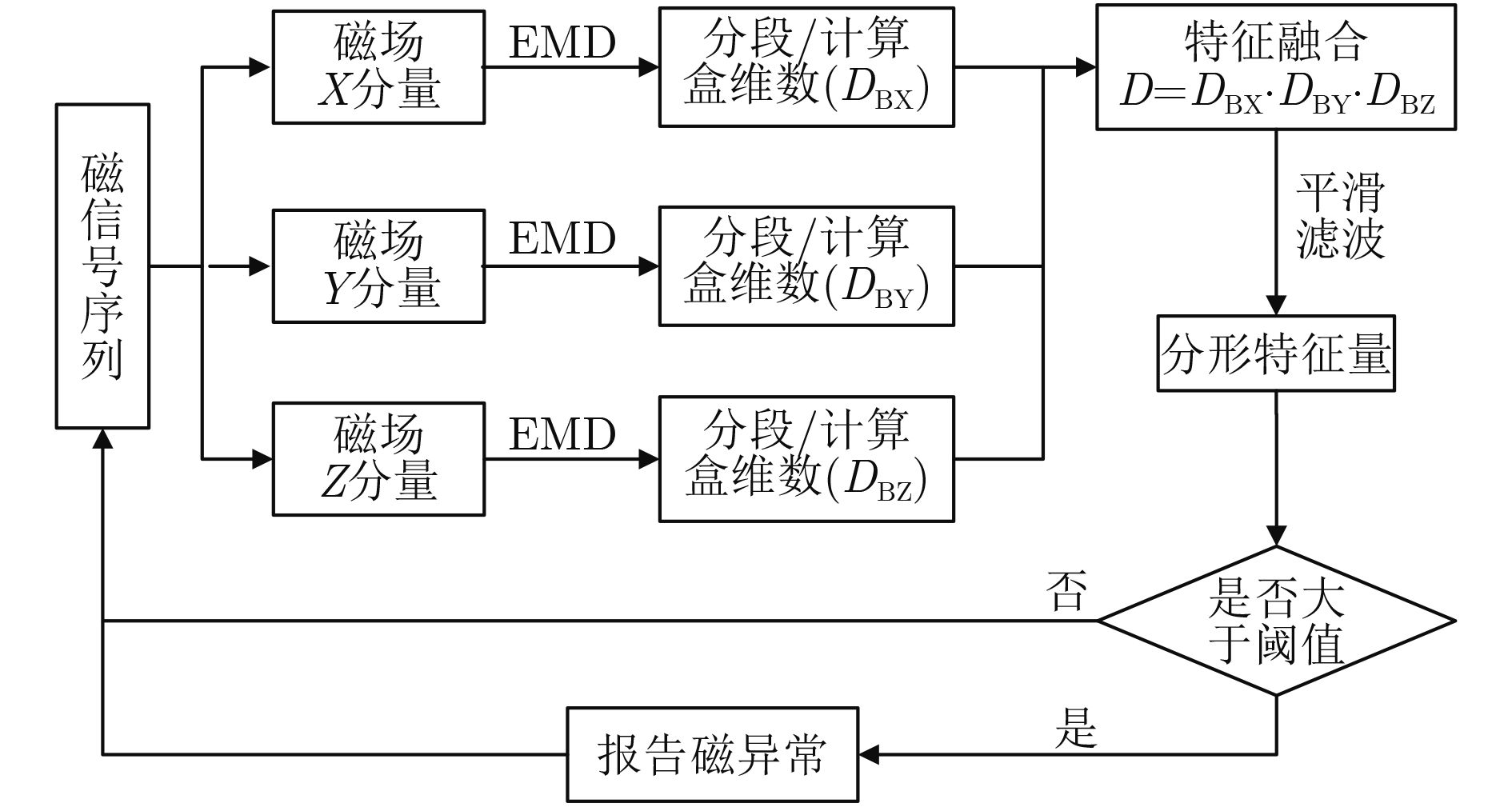
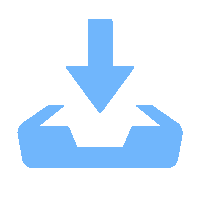
本文提出的磁异常检测算法分3个步骤:经验模态分解(EMD);分段计算盒维数;分量融合与平滑滤波,算法流程图如图2所示。
经验模态分解(Empirical Mode Decomposition, EMD)是黄锷博士(Huang NE)在美国国家宇航局与其他人于1998年创造性地提出的。EMD实质上是对非线性非平稳信号进行平稳化处理的一种手段,其结果是将信号中不同尺度的波动和趋势逐级分解,产生一系列具有不同尺度的序列,称为固有模态函数(Intrinsic Mode Function, IMF)。EMD可将时域信号
| x\left( t \right) = \sum\limits_{i = 1}^n {{c_i}\left( t \right)} + r\left( t \right) | (6) |
其中,
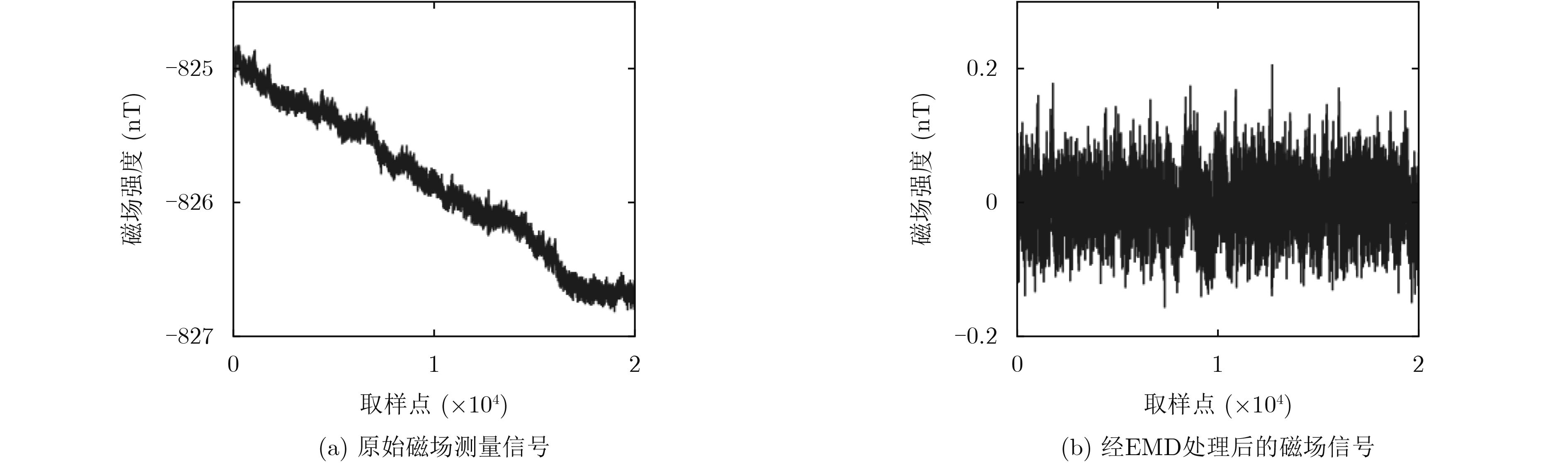
磁场传感器测得的磁信号
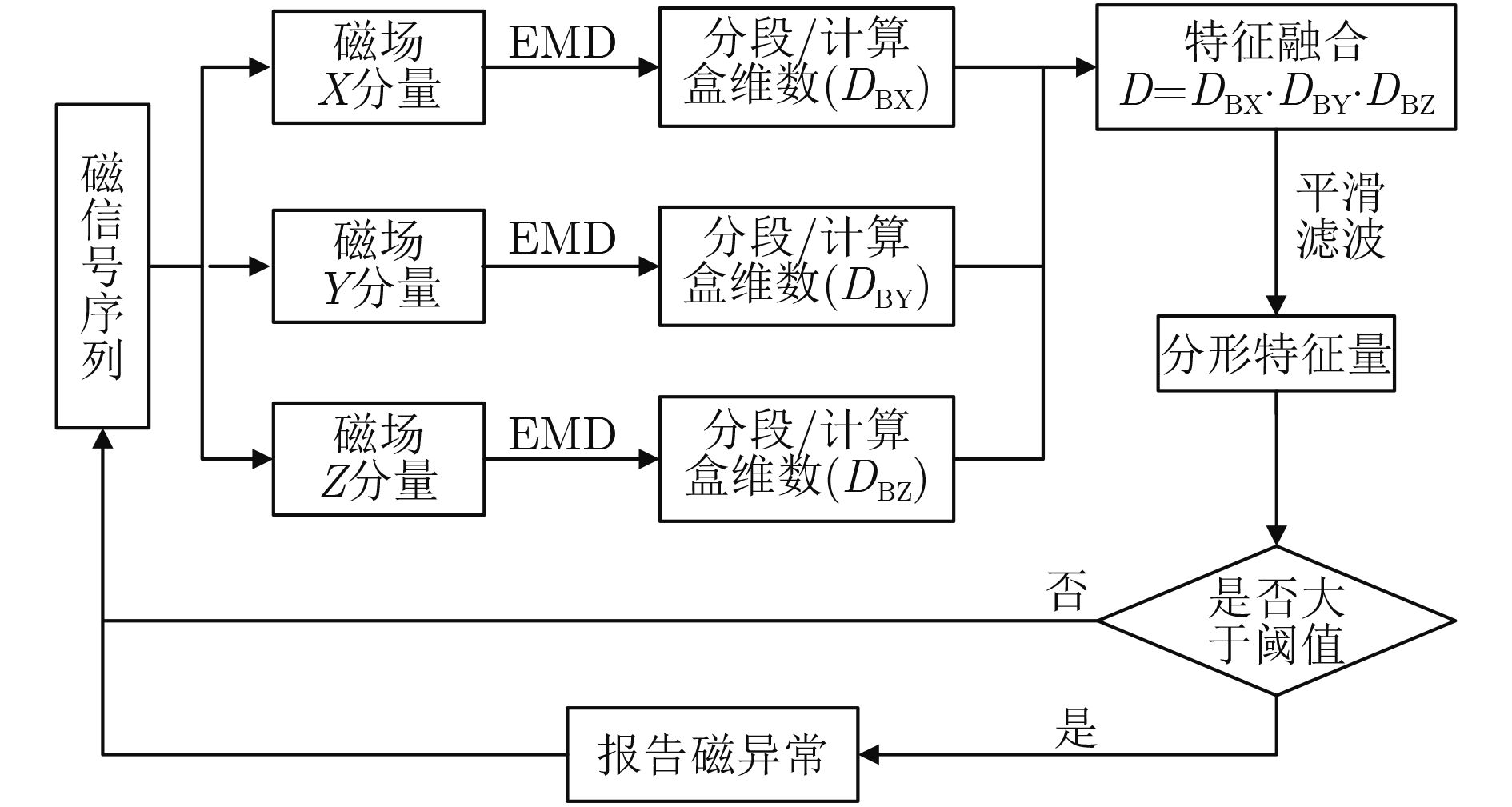
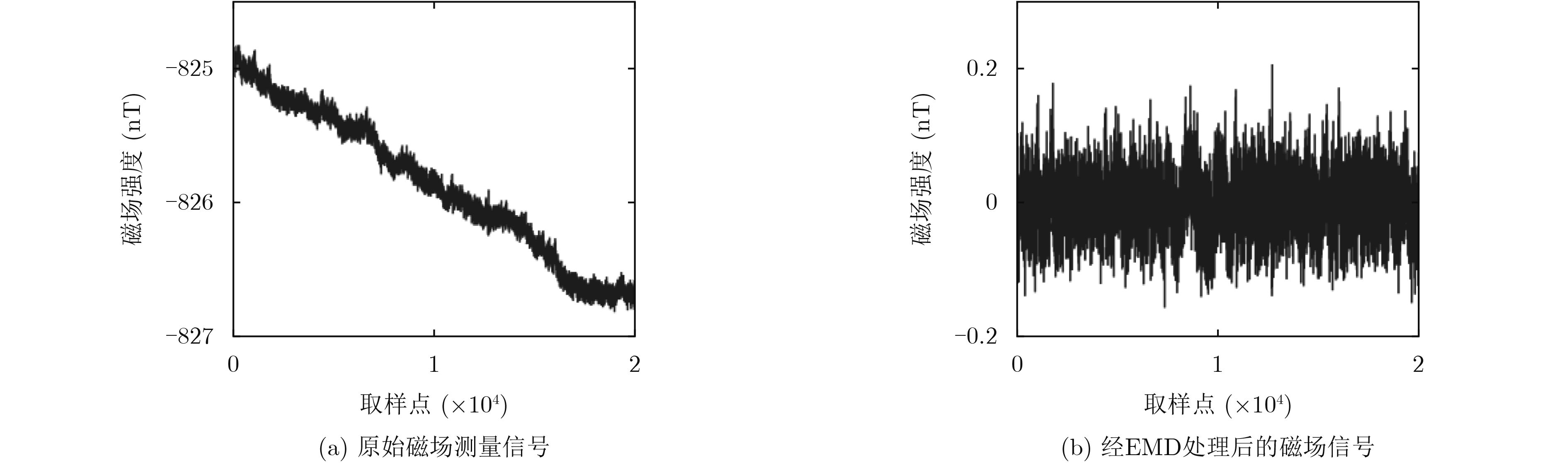
实测传感器X轴分量磁场信号如图3(a)所示,经EMD去除趋势项后信号如图3(b)所示。处理前后背景磁场的峰峰值由2.0 nT降为0.36 nT,可见EMD能显著消除地磁及传感器趋势场的影响。
对于一个时间序列而言,其盒维数的计算步骤如下:
(1)假定时间序列
(2)选取边长为
(3)计算盒维数
磁场信号经分段计算盒维数后原始信号就变成盒维数表示的时间序列,为了降低盒维数瞬时突变与漂移对磁异常检测产生干扰,提升微弱异常信号的准确检测能力,需要对盒维数序列进行后处理。后处理主要分为两个部分:分量融合、平滑滤波。
分量融合,指对矢量磁场传感器各分量的盒维数序列进行融合处理,目的在于增强磁异常盒维数的特征信息,从而提升磁异常的检测能力。融合的方法有很多,包括计算各序列的1-范数、2-范数、积等等。一般情况下,各种融合方式,都可以一定程度地提升目标磁异常的检测能力,而针对具体应用场景可以尝试不同的融合方式。本文算法中选用的融合方式如式(7):
| {D_{\rm{B}}} = {D_{\rm{BX}}} \cdot {D_{\rm{BY}}}\cdot {D_{\rm{BZ}}} | (7) |
其中,
平滑滤波,对计算的盒维数序列进行平滑,从而避免瞬态干扰的影响同时避免盒维数计算过程中误差引起信号的误检。考虑到磁异常信号频段主要存在于0.05–0.50 Hz,当采样率为fs时,平滑滤波器的长度可以考虑为0.5 fs,在不影响磁异常信号检测的前提下,减少环境与分形维数计算误差带来的影响。
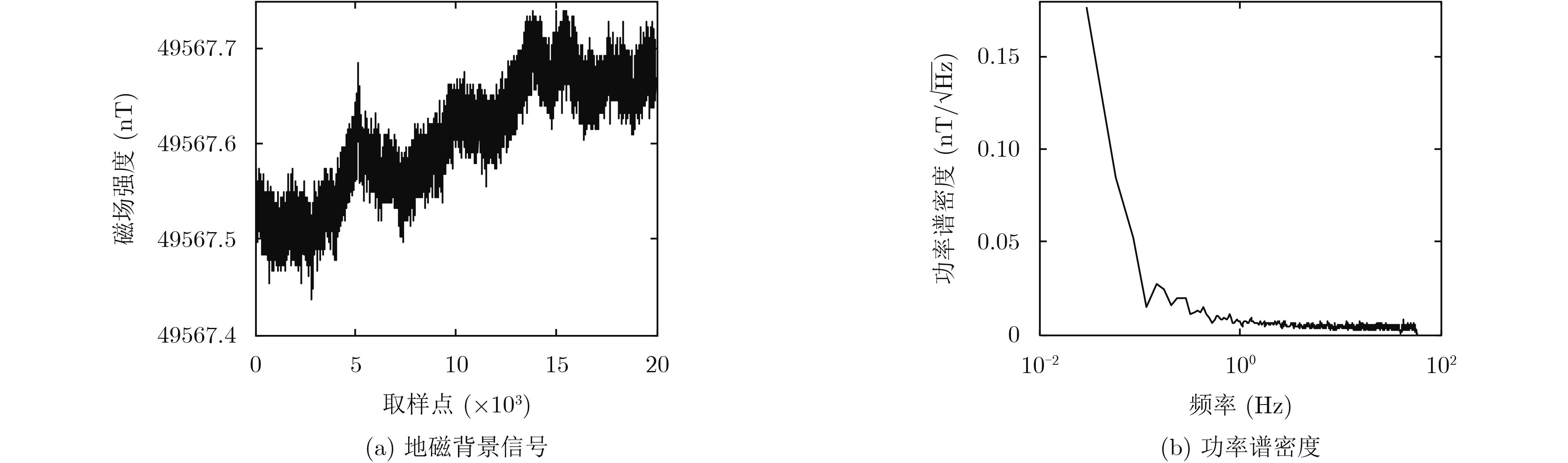
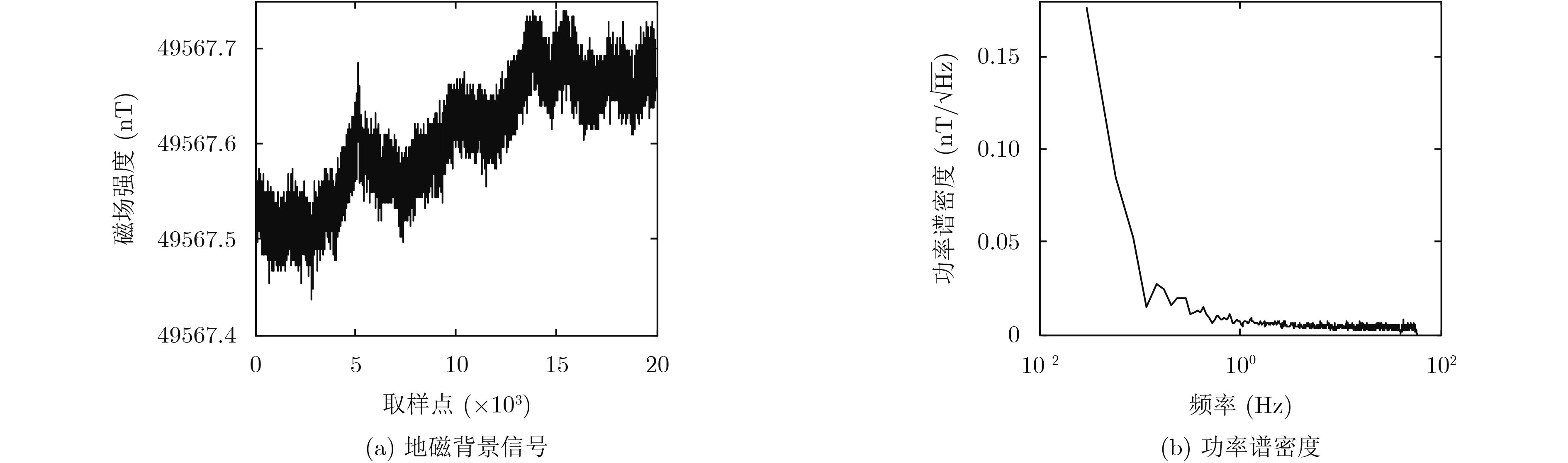
实测地磁背景信号如图4(a),采样率为120 Hz。为更好地评估地磁背景,对测量信号进行功率谱估计,得功率谱分布如图4(b)所示,可见地磁分布噪声功率谱近似于1/f 分布。为使模拟检测试验更加接近真实情况,采用模拟1/f 噪声代替地磁噪声进行磁异常信号的仿真检测试验,进而评估基于磁异常分形特征的检测算法性能。
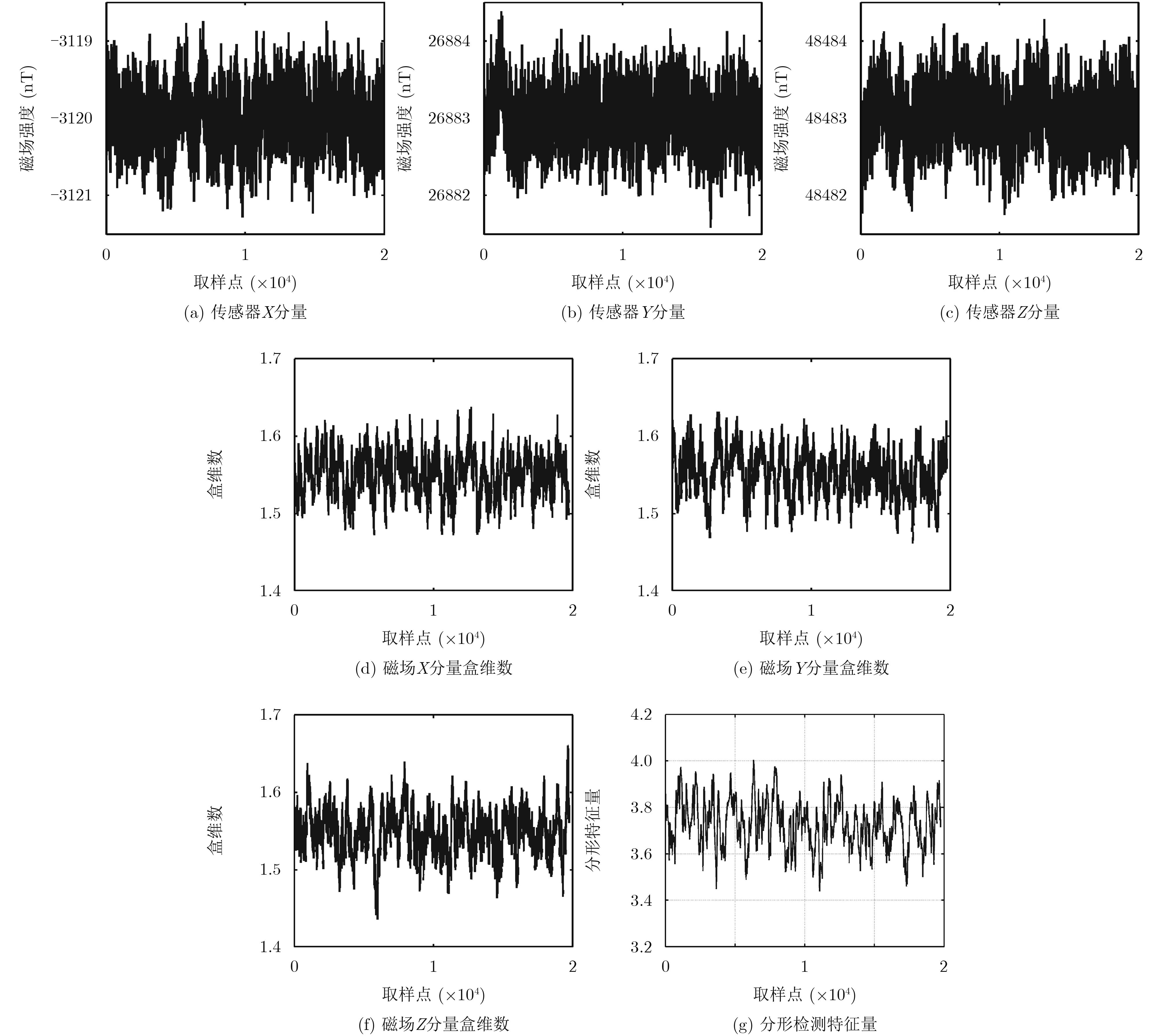
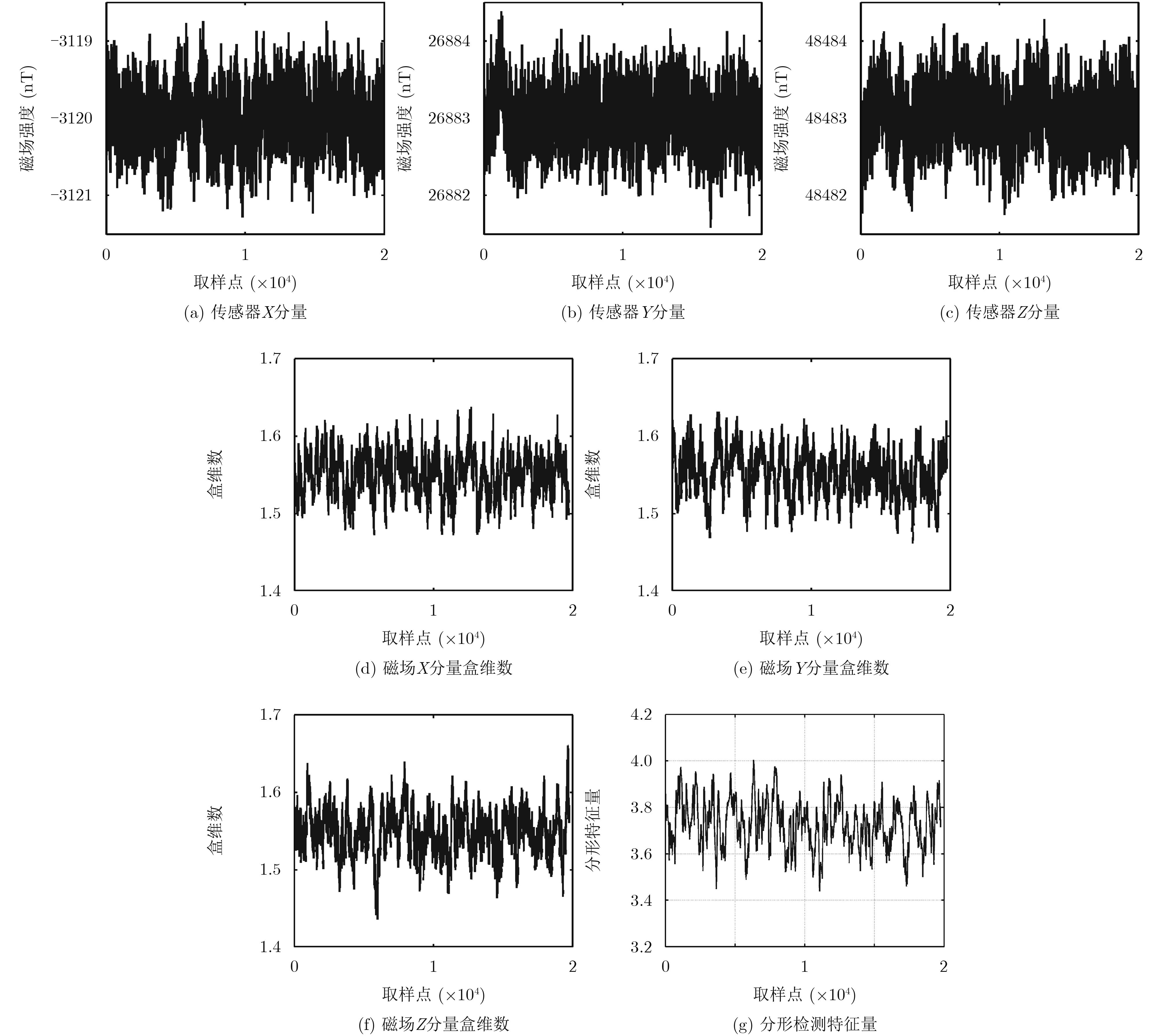
仿真背景磁场如图5所示,其中图5(a), 5(b), 5(c)分别为地磁东向分量、北向分量与垂直分量磁场,图5(d), 5(e), 5(f)为其对应的分形维数。由图可见,1/f 噪声具有一定的分形特征。当无磁异常信号时,分量融合与平滑后的分形特征量如图5(g),可见背景噪声的分形特征量具有相对稳定的值,因此可通过设定检测门限以实现磁异常信号的检测。
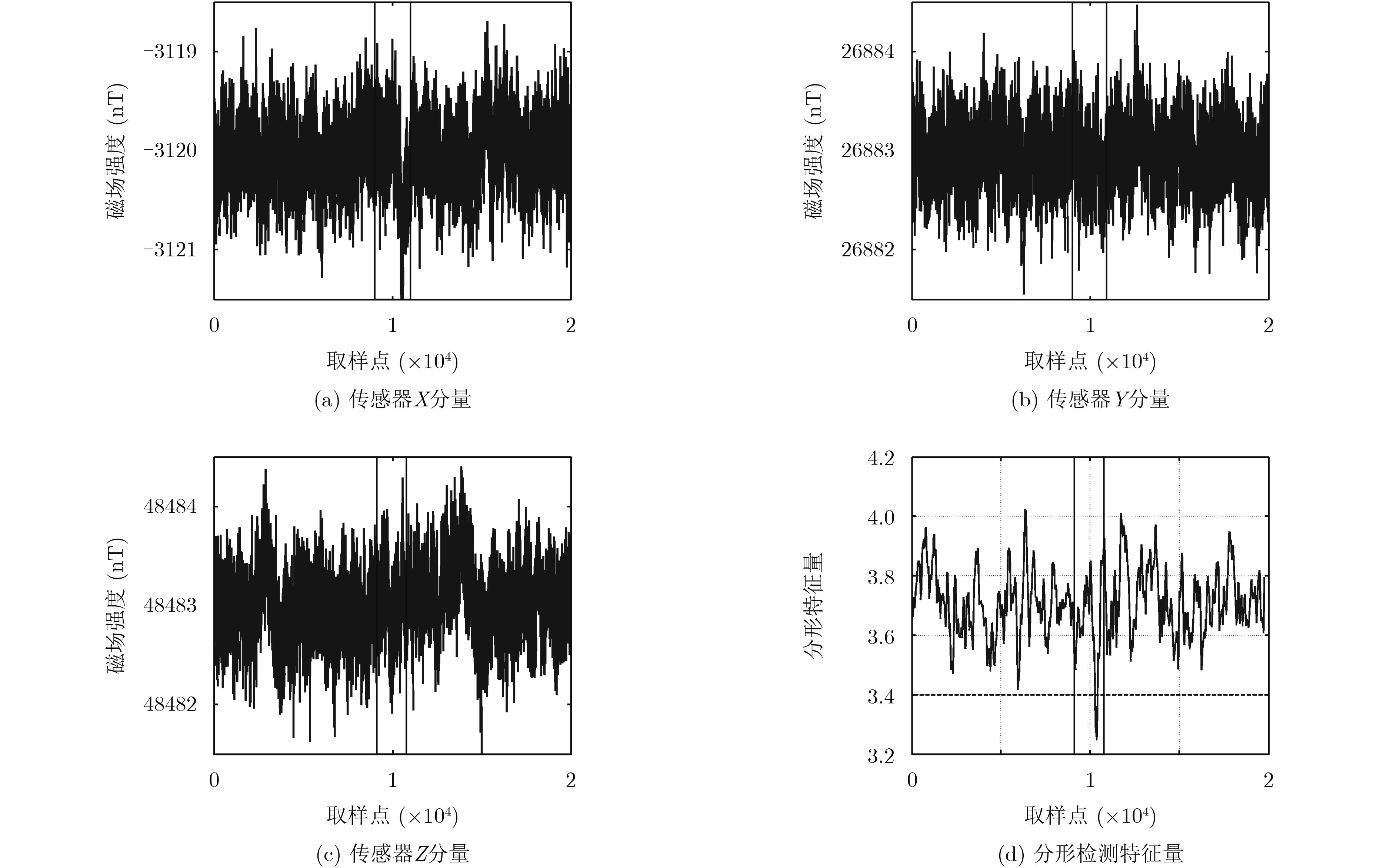
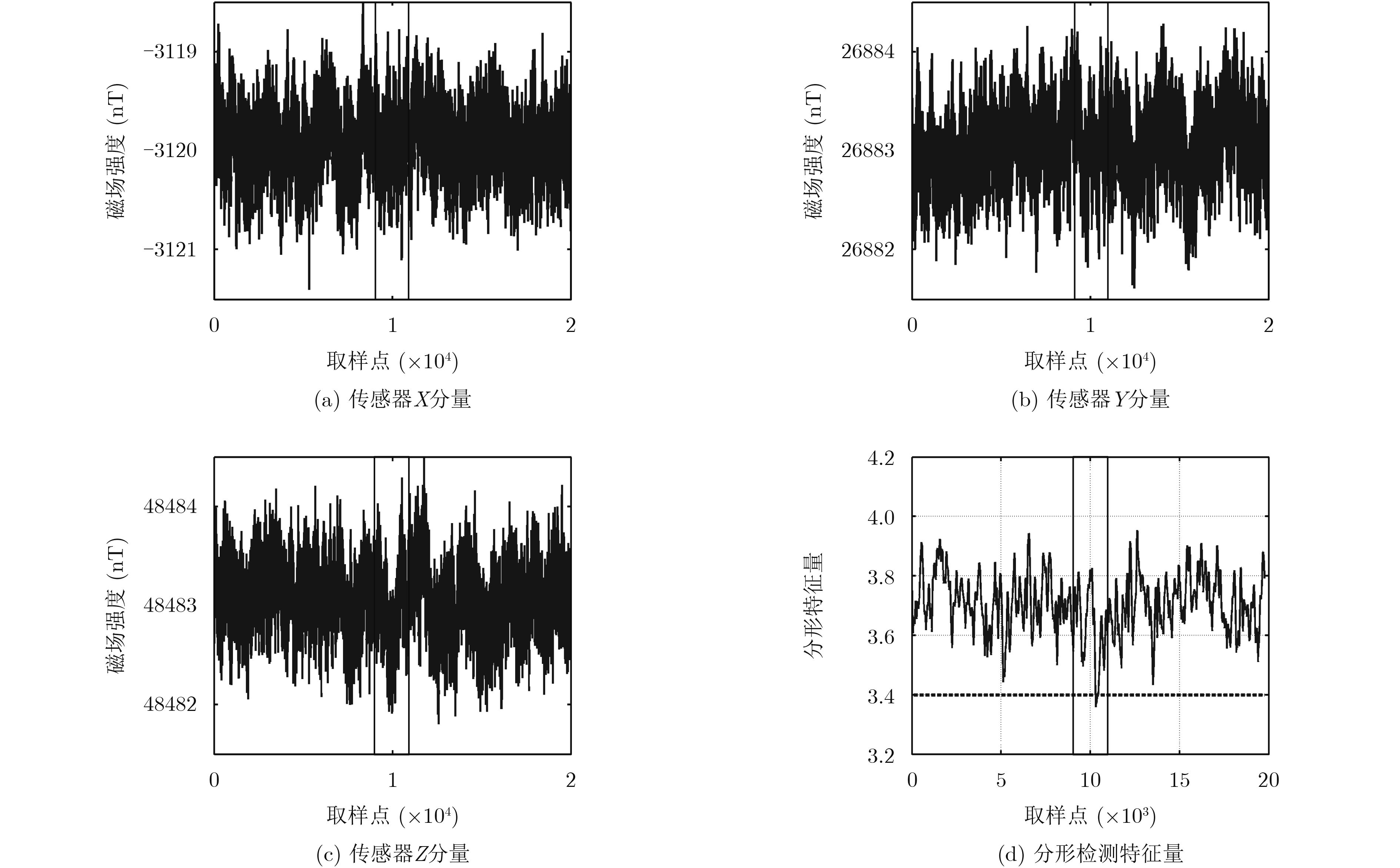
仿真目标磁异常波形仍如图1(b)所示,磁异常信号峰峰值为1.1 nT时(信噪比为–8.1 dB),含磁异常的3分量磁场数据如图6(a), 6(b), 6(c)所示,其中磁异常位于图中黑框内,分形检测特征量如图6(d)所示,通过分形特征参数可明显观察到磁异常位置处的分形特征变化。
当磁异常的峰峰值为0.61 nT时(信噪比为–13.2 dB), 3分量磁场数据如图7(a), 7(b), 7(c)所示,其中磁异常位于图中黑框内,分形检测特征量如图7(d)所示,通过分形特征仍可观察到磁异常位置处的分形特征量的变化。
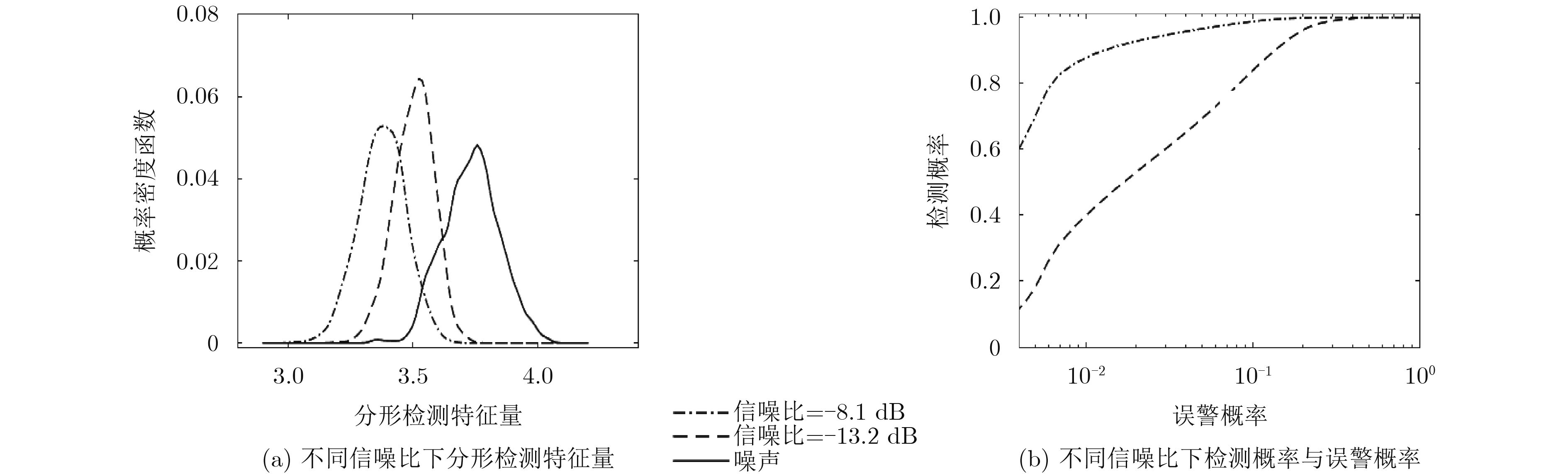
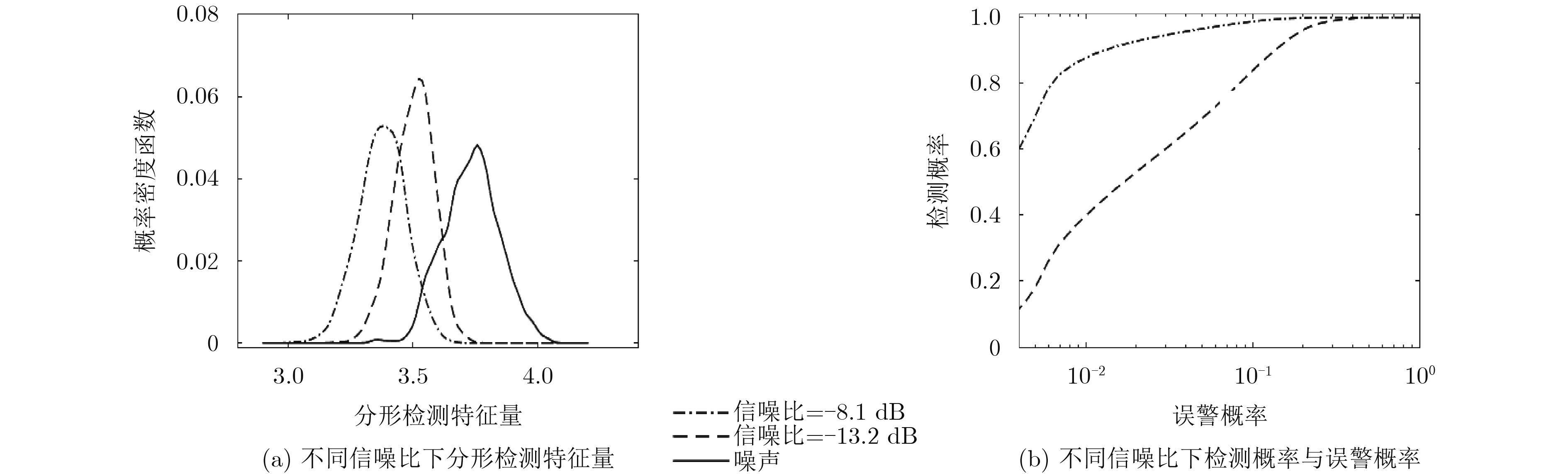
为选择合适的检测门限,采用蒙塔卡洛仿真的方法,进行1000次的仿真模拟检测。通过对信噪比为–8.1 dB和–13.2 dB的磁异常与不含磁异常信号的分形特征量进行计算,分形检测特征量如图8(a)所示;同时,对于不同检测门限的检测与误警概率如图8(b)所示。
结合图8(a),根据奈曼-皮尔逊准则,对于信噪比为–8.1 dB的磁异常信号,选择检测门限为3.54时,检测概率与误警概率分别为96.14%和4.44%;对于信噪比为–13.2 dB的磁异常信号,选择检测门限为3.62时,检测概率与误警概率分别为91.03%和14.40%。
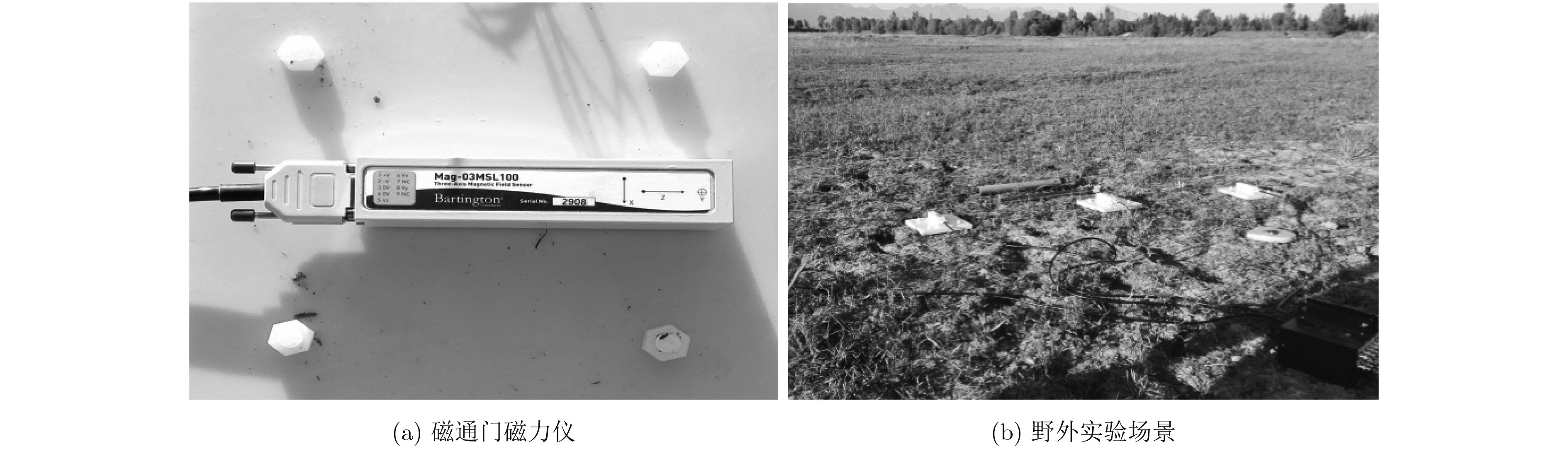
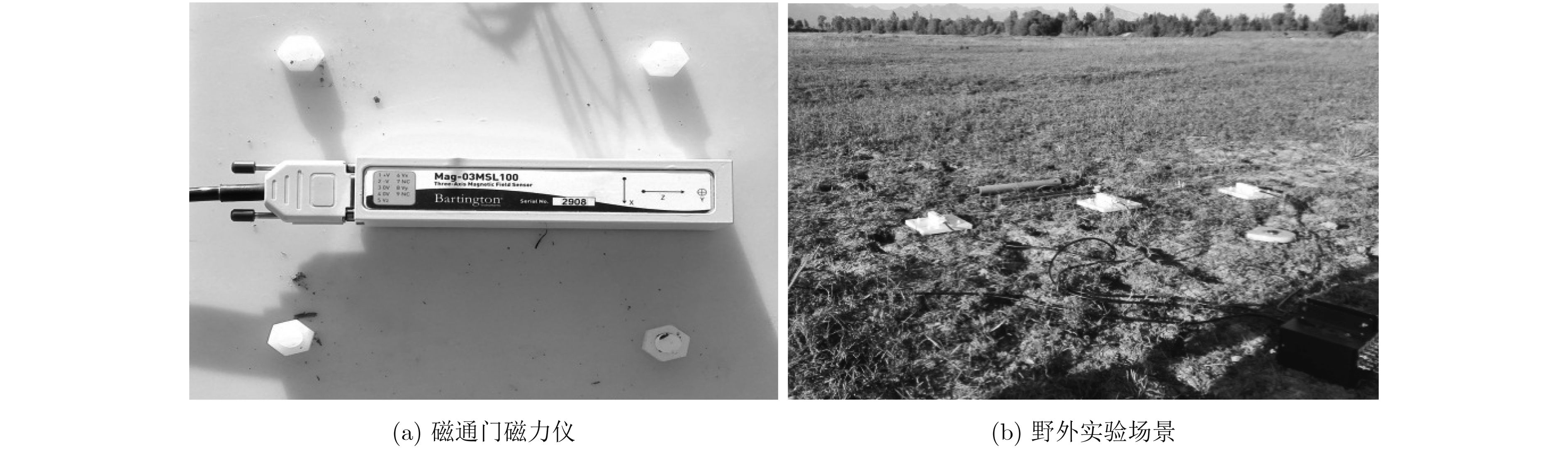
地磁背景磁异常检测实验在中张家口市怀来县官厅水库附近进行,选用的磁场传感器为Bartington公司生产的低噪声版Mag-03磁通门传感器,如图9(a)所示,其噪声水平约为
背景磁场经EMD去除趋势项后的信号如图10所示,其中图10(a), 10(b), 10(c)分别为地磁场北向分量、东向分量与垂直分量。检测算法处理得到分形检测特征量如图10(d)所示。
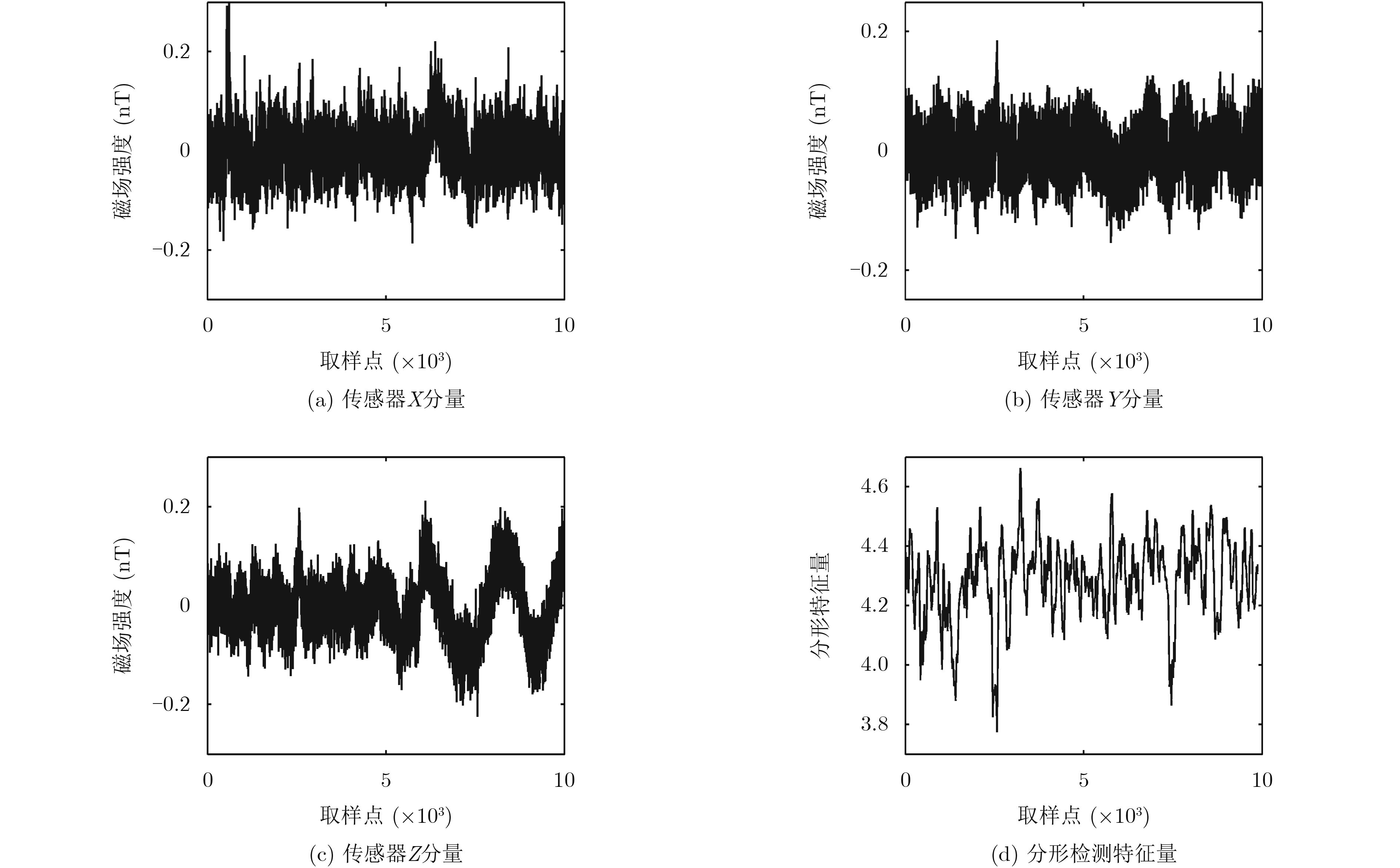
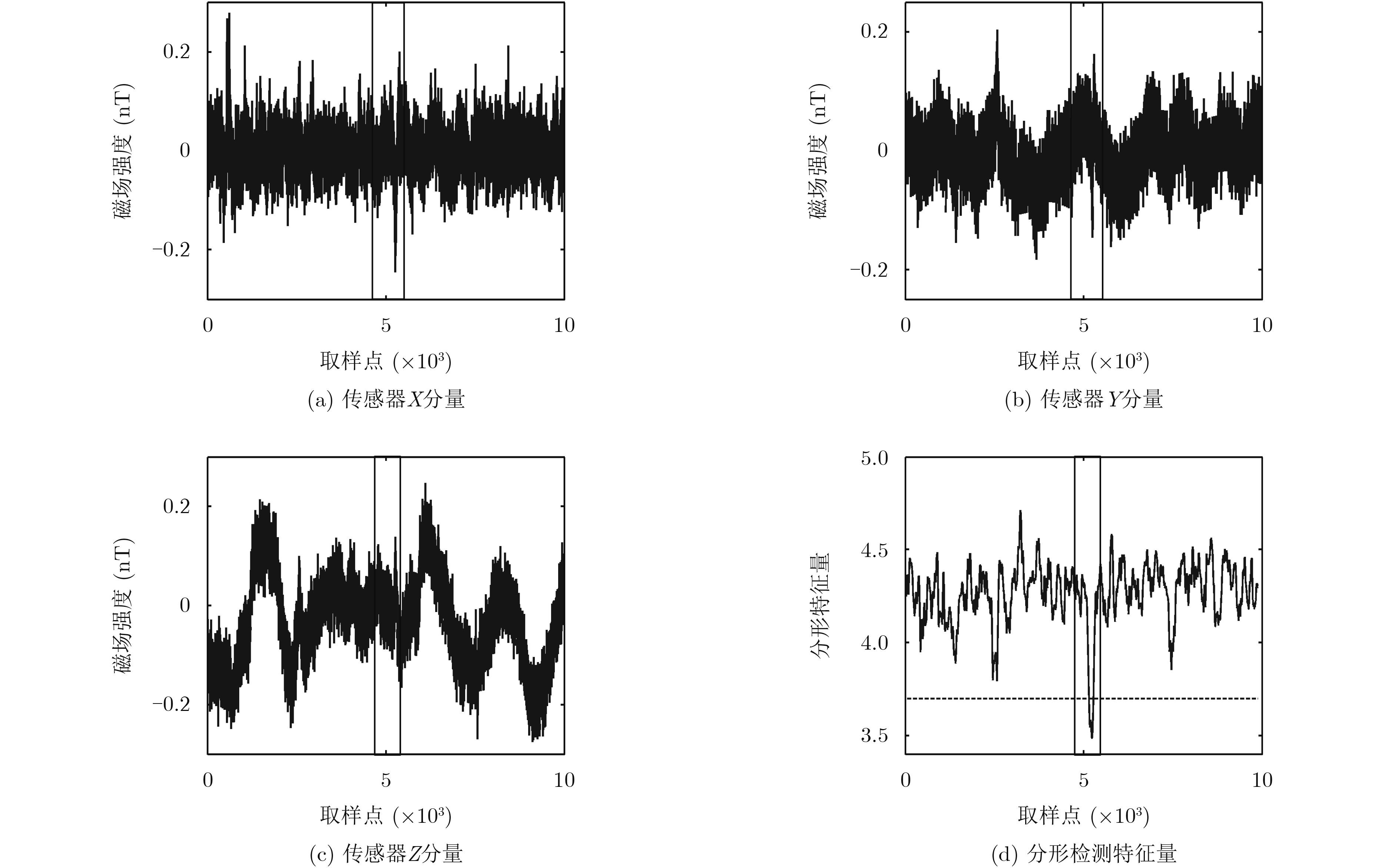
含磁异常的磁场数据如图11所示,其中图11(a), 11(b), 11(c)分别为地磁场北向分量、东向分量与垂直分量经EMD去除趋势项后的结果,磁异常存在于图中黑色方框内。分形检测特征量如图11(d)所示,磁异常信号出现时刻分形特征量具有明显变化,可见该算法可以检测到地磁背景中的弱磁异常信号。
本文通过研究背景地磁场与目标磁异常信号在分形特征的差别,提出一种基于目标磁异常信号分形特征的单传感器的磁异常检测算法,检测算法通过分段计算传感器磁场信号分形维数、融合分量信息、平滑处理并通过设置检测门限实现地磁背景与磁异常的识别。该算法不需要参考传感器,即可实现人为磁异常目标的检测。与匹配正交基检测算法相比,文中算法不需要预判目标运动情况与目标的磁偶极子假设;与熵检测和高阶交叉检测算法相比,文中算法在1/f 噪声与地磁背景下均具有较好的检测能力,因而在地磁背景下弱磁异常的检测上具有优势。在1/f 噪声中仿真检测试验,该算法在–8.1 dB信噪比下,选择检测门限为3.54时,检测概率与误警概率分别为96.14%和4.44%;该算法在–13.2 dB信噪比下,选择检测门限为3.62时,检测概率与误警概率分别为91.03%和14.40%。通过野外试验,证实该算法可以在地磁背景下检测微弱磁异常信号。在地磁背景下微弱磁异常的检测时,本文算法的误警概率大幅提升,可通过增加传感器的数目提升算法的检测能力。
|
DIMITROPOULOS K, GRAMMALIDIS, GRAGOPOULO I, et al. Detection, tracking and classification of vehicles and aircraft based on magnetic sensing technology[J]. Proceedings of World Academy of Science Engineering & Technology, 2008, 1(4): 195–200.
|
|
GABELLONE A, FAGGIONI O, SOLDANI M, et al. CAIMAN experiment[C]. Proceedings of the 20th UDT Undersea Defence Technology Europe Conference, Naples, Italy. 2007: 1–13.
|
|
FAGGIONI O, SOLDANI M, ZUNINO R, et al. Building the synthetic " Mac System”: An analytical integration of magnetic and acoustic subsystems for port protection scenarios[J]. Physical Review, 2009, 54(6): 1739–1746.
|
|
穆志海. 水下小目标探测技术研究[D]. [硕士论文], 哈尔滨工程大学, 2012.
MU Zhihai. Research on underwater small target detection technology[D]. [Master dissertation], Harbin Engineering University, 2012.
|
|
张宁. 基于MAD的水下运动物体航迹测量研究[D]. [硕士论文], 西安电子科技大学, 2008.
ZHANG Ning. Research on track measurement of underwater moving objects based on MAD[D]. [Master dissertation], Xidian University, 2008.
|
|
韦涛. 水下弱目标被动探测技术研究[D]. [硕士论文], 南京理工大学, 2012.
WEI Tao. Research on passive detection technology of underwater weak targets[D]. [Master dissertation], Nanjing University of Science & Technology, 2012.
|
|
KEIICHI M. Detection of magnetic anomaly signal by applying adjustable weight functions[J]. IEEE Transactions on Magnetics, 1990, 26(2): 1083–1087. doi: 10.1109/20.106508
|
|
GINZBURG B, FRUMKIS L, and KAPLAN B Z. Processing of magnetic scalar gradiometer signals using orthonomal functions[J]. Sensors & Actuators A Physical, 2002, 102(1/2): 67–75. doi: 10.1016/S0924-4247(02)00351-5
|
|
FAN Yao, FANG Guangyou, and LIU Xiaojun. Parabolic trail OBFs in magnetic anomaly detection[J]. Progress in Electromagnetics Research B, 2017, 74: 23–25. doi: 10.2528/PIERB16091301
|
|
LIU Dunge, XU Xin, HUANG Chao, et al. Adaptive cancellation of geomagnetic background noise for magnetic anomaly detection using coherence[J]. Measurement Science & Technology, 2015, 26(1): 1–6. doi: 10.1088/0957-0233/26/1/015008
|
|
张坚, 林春生, 邓鹏, 等. 基于小波域OBF分解的磁异常信号检测算法[J]. 弹箭与制导学报, 2011(6): 187–189. doi: 10.3969/j.issn.1673-9728.2011.06.055
ZHANG Jian, LIN Chunsheng, DENG Peng, et al. Detection of magnetic anomaly signal based on OBF decomposition in wavelet domain[J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2011(6): 187–189. doi: 10.3969/j.issn.1673-9728.2011.06.055
|
|
张坚, 林春生, 黄凡. OBF分解与BP网络在船舶磁场信号检测中的应用[J]. 船电技术, 2011, 31(7): 13–16. doi: 10.3969/j.issn.1003-4862.2011.07.004
ZHANG Jian, LIN Chunsheng, and HUANG Fan. Application of OBF decomposition and BP neural network to magnetic signal detection of a ship[J]. Marine Electric, 2011, 31(7): 13–16. doi: 10.3969/j.issn.1003-4862.2011.07.004
|
|
SHEINKER A, GINZBURG B, SALOMONSKI N, et al. Magnetic anomaly detection using high-order crossing method[J]. IEEE Transactions on Geoscience & Remote Sensing, 2012, 50(4): 1095–1103. doi: 10.1109/TGRS.2011.2164086
|
|
SHEINKER A, FRUMKIS L, GINZBURG B, et al. Magnetic anomaly detection using a three-axis magnetometer[J]. IEEE Transactions on Magnetics, 2009, 45(1): 160–167. doi: 10.1109/TMAG.2008.2006635
|
|
SHEINKER A, SALOMONSKI N, GINZBURG B, et al. Magnetic anomaly detection using entropy filter[J]. Measurement Science and Technology, 2008, 19(4): 045205. doi: 10.1088/0957-0233/19/4/045205
|
|
SHEINKER A, SHKALIM A, SALOMONSKI N, et al. Processing of a scalar magnetometer signal contaminated by 1/f α noise[J]. Sensors and Actuators A: Physical, 2007, 138(1): 105–111. doi: 10.1016/j.sna.2007.04.018
|
|
LEONCINI D, DECHERCHI S, FAGGIONI O, et al. A preliminary study on SVM based analysis of underwater magnetic signals for port protection[J]. Computational Intelligence in Security for Information Systems, 2009, 63: 37–44. doi: 10.1007/978-3-642-04091-7_5
|
|
LEONCINI D, DECHERCHI S, ROMA S, et al. Linear SVM for underwater magnetic signals based port protection[J]. Journal of Information Assurance and Security, 2010, 5: 401–408.
|
|
DECHERCHI S, LEONCINI D, GASTALDO P, et al. Computational intelligence methods for underwater magnetic-based protection systems[C]. Proceedings of International Joint Conference on Neural Networks, San Jose, USA, 2011: 238–245. doi: 10.1109/IJCNN.2011.6033227.
|
|
朱华, 姬翠翠. 分形理论及其应用[M]. 北京: 科学出版社, 2011: 24–31.
ZHU Hua and JI Cuicui. Fractal Theory and Its Applications[M]. Beijing: Science Press, 2011: 24–31.
|
|
赵健, 雷蕾, 蒲小勤. 分形理论及其在信号处理中的应用[M]. 北京: 清华大学出版社, 2008: 3–7.
ZHAO Jian, LEI Lei, and PU Xiaoqin. Fractal Theory and Its Application in Signal Processing[M]. Beijing: Tsinghua University Press, 2008: 3–7.
|
Figures(11)
Xiong Shang-kun, Chen Fang-jiong, Wei Gang. A New MMSE Approach to Blind Multiuser Detection[J]. Journal of Electronics & Information Technology, 2004, 26(8): 1218-1223.

 下载:
下载:






















 DownLoad:
DownLoad: