-
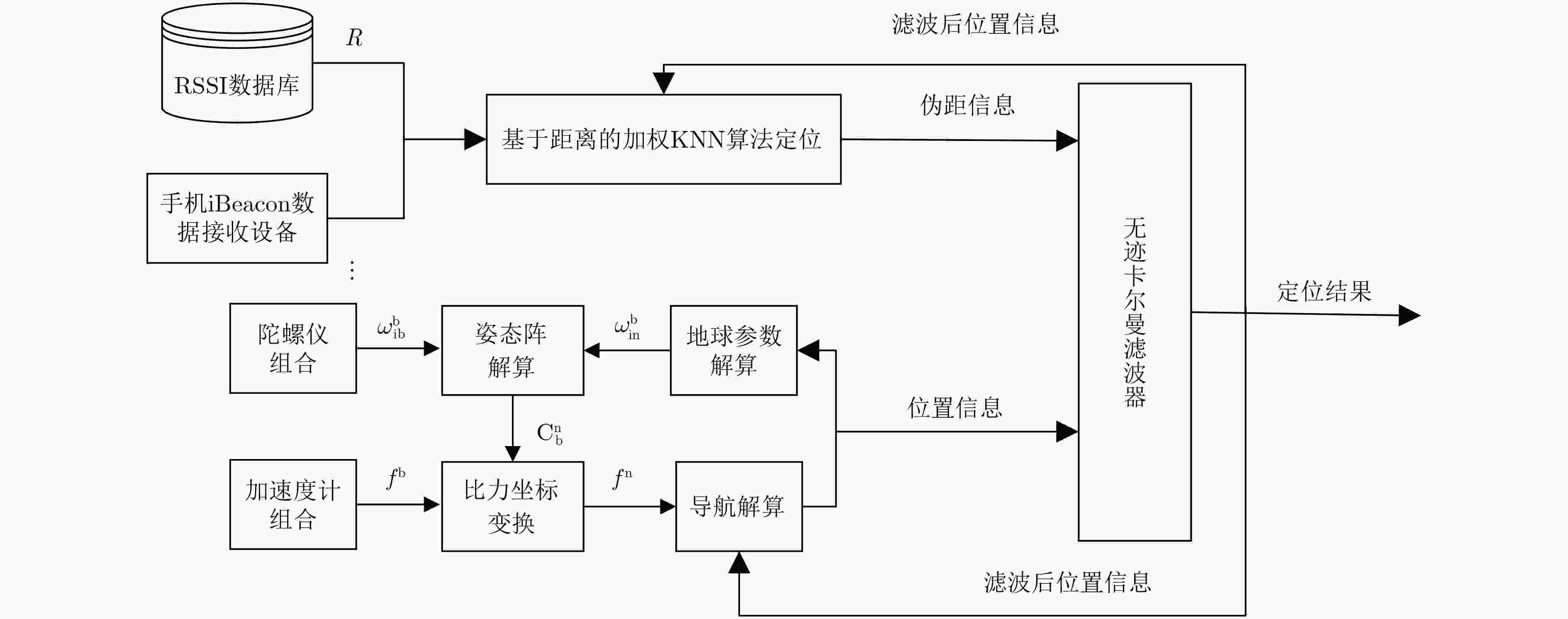
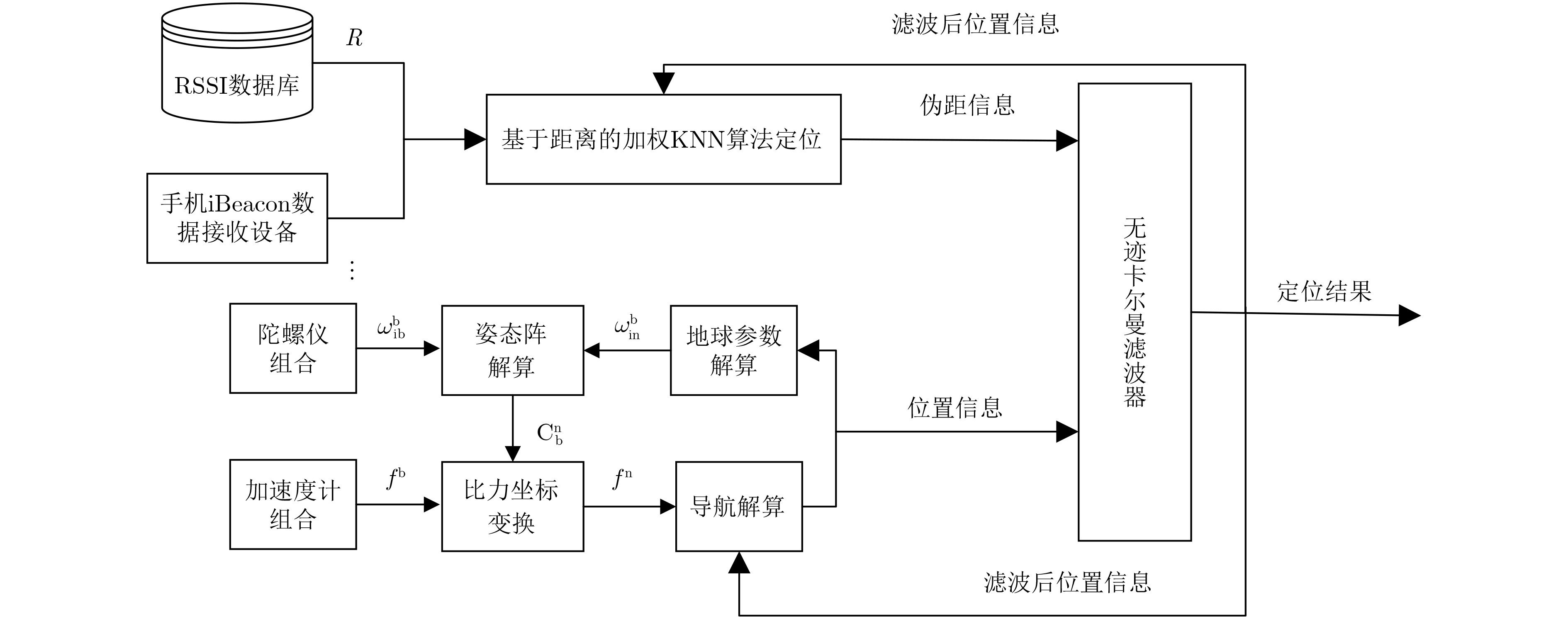
图 1 iBceacon/MEMS-INS组合导航算法方案
Figure 1.
-
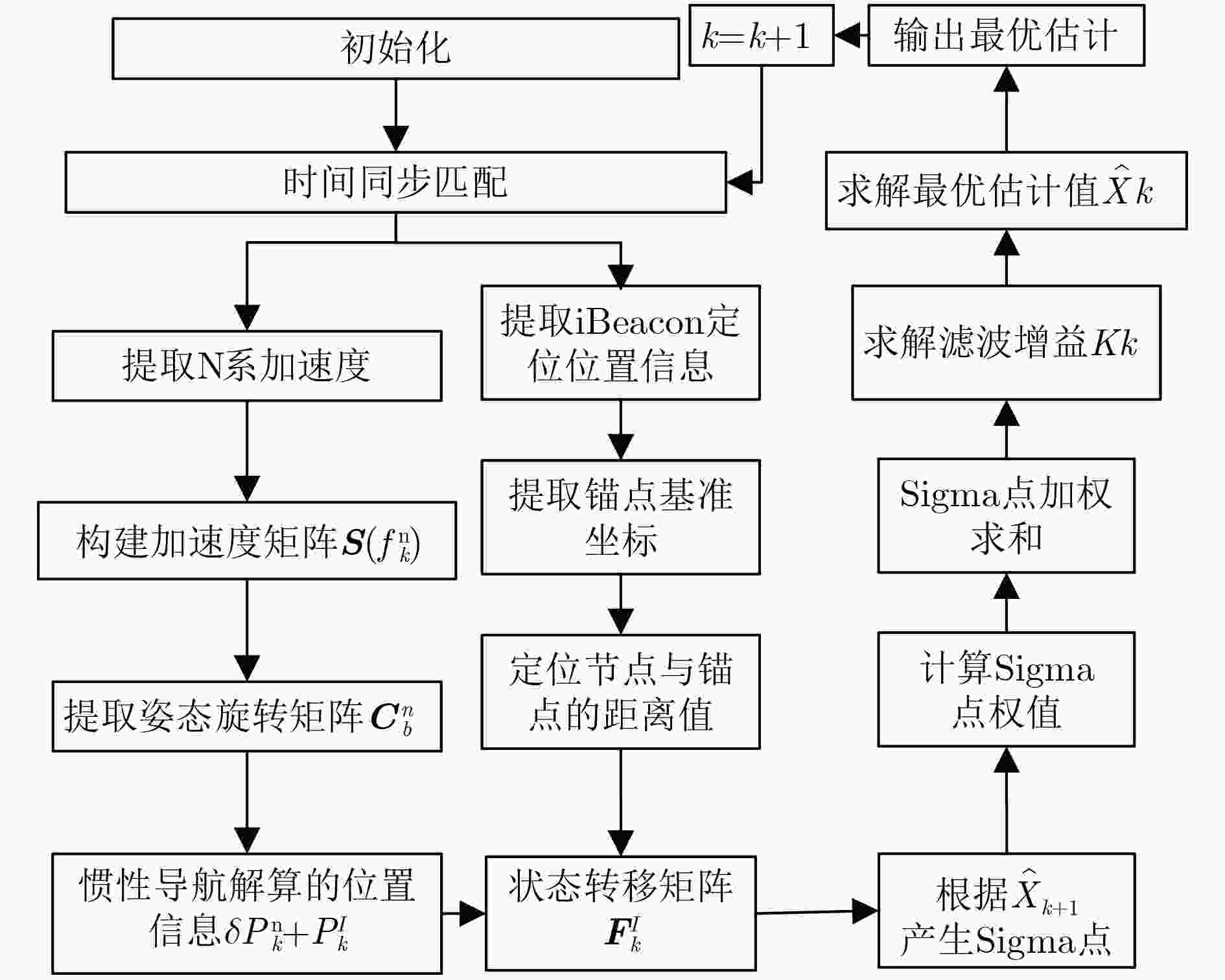
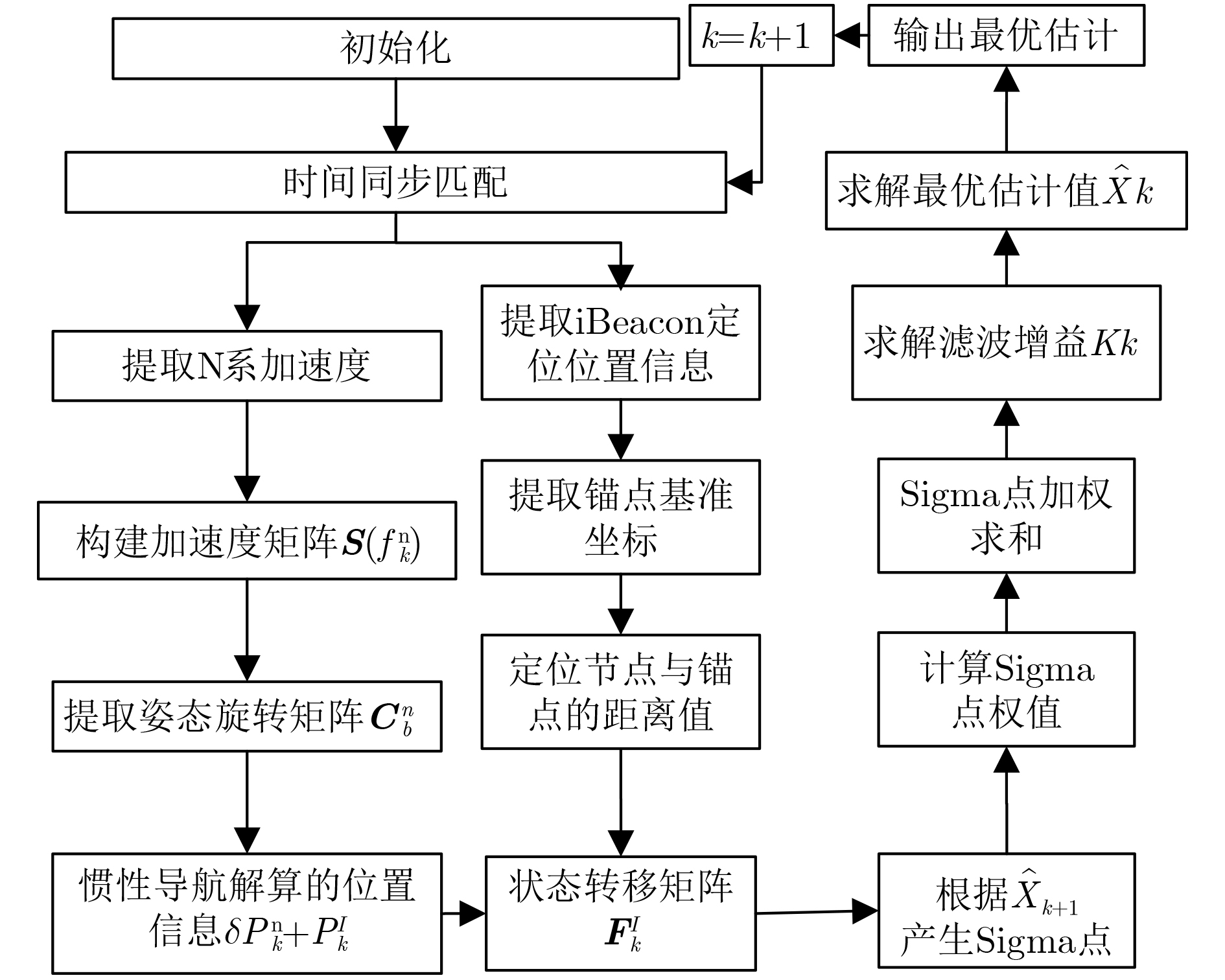
图 2 UKF数据融合定位算法流程图
Figure 2.
-
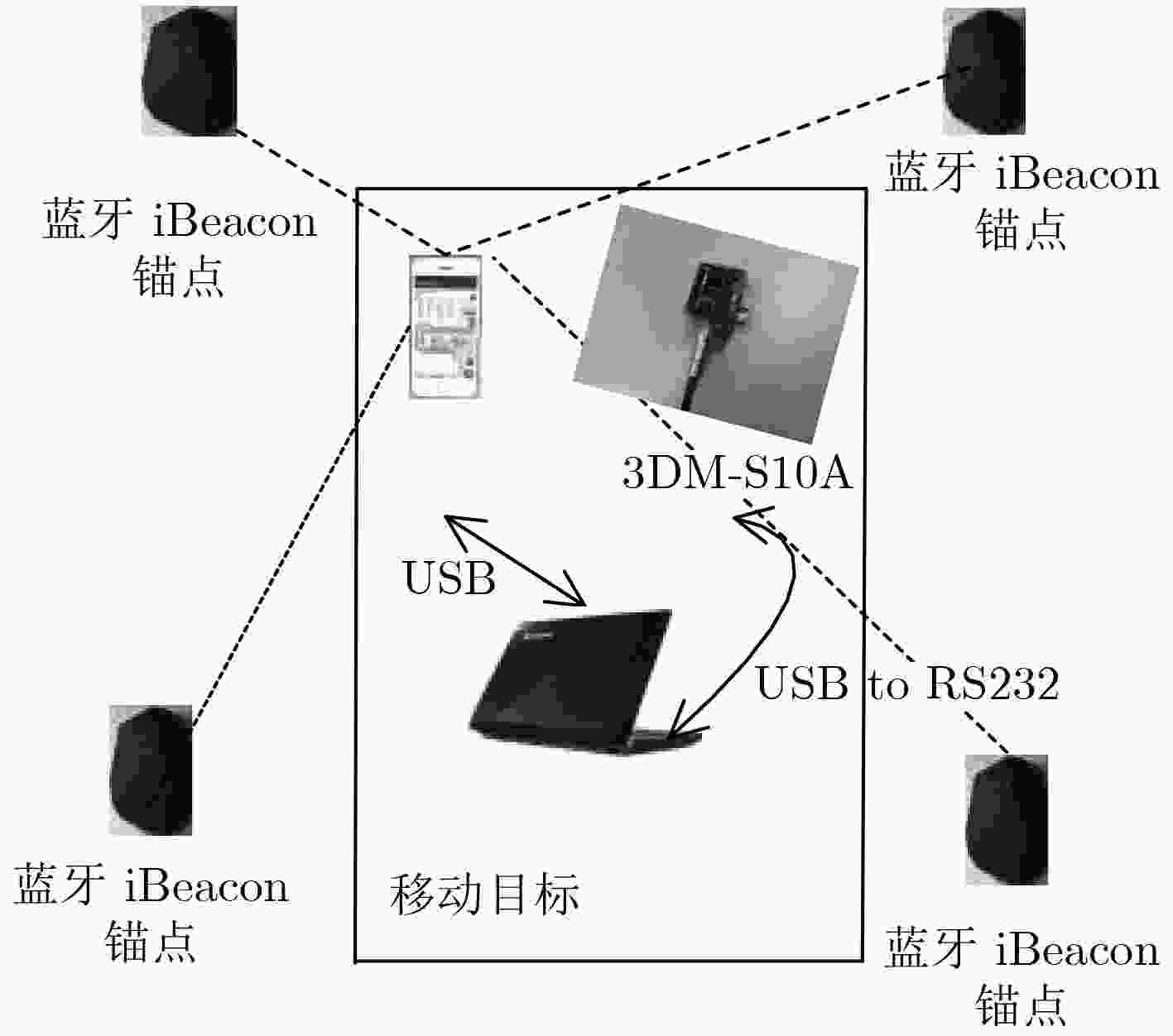
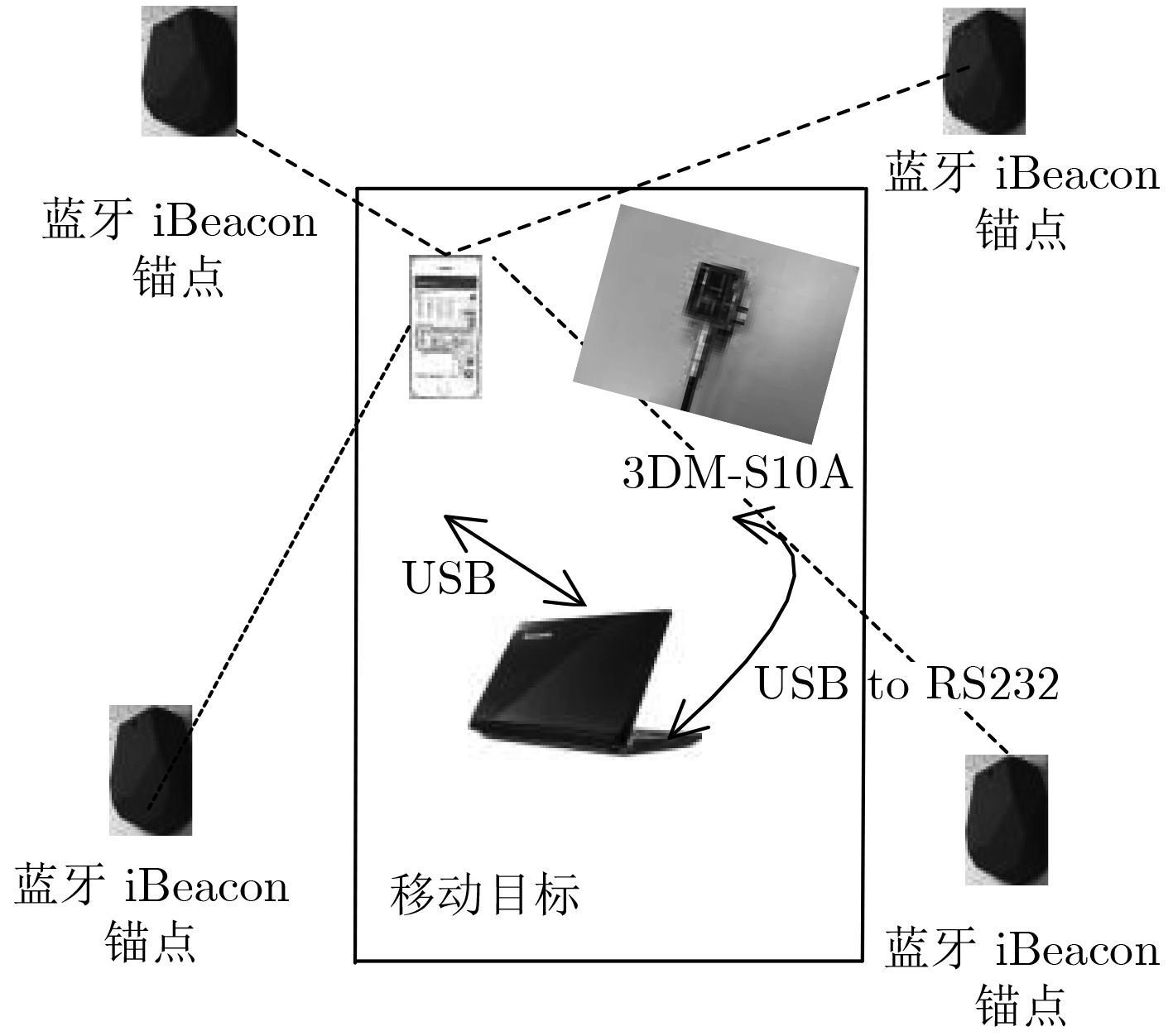
图 3 实验平台基本架构
Figure 3.
-

图 4 iBeacon信标布置平面示意图
Figure 4.
-
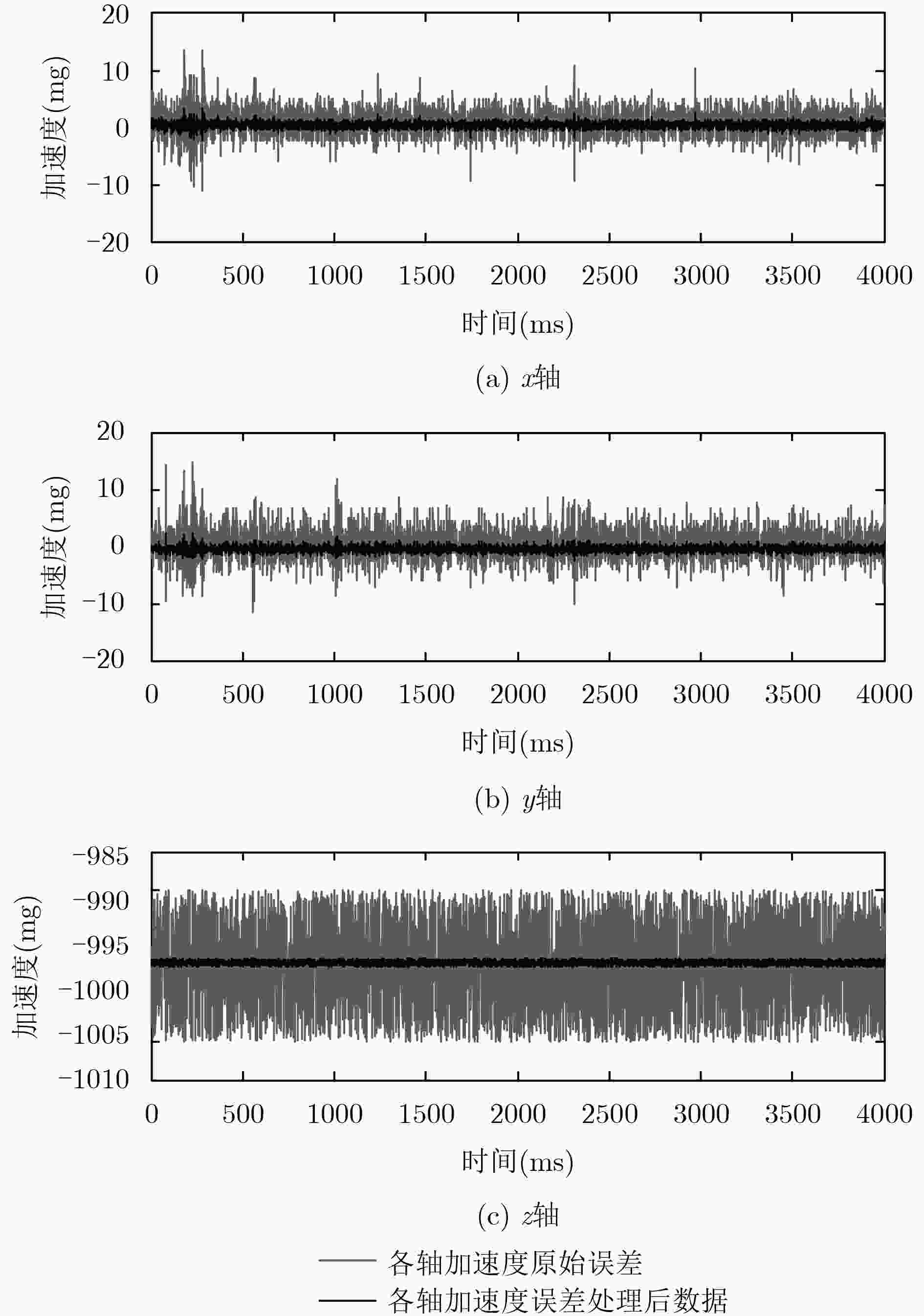
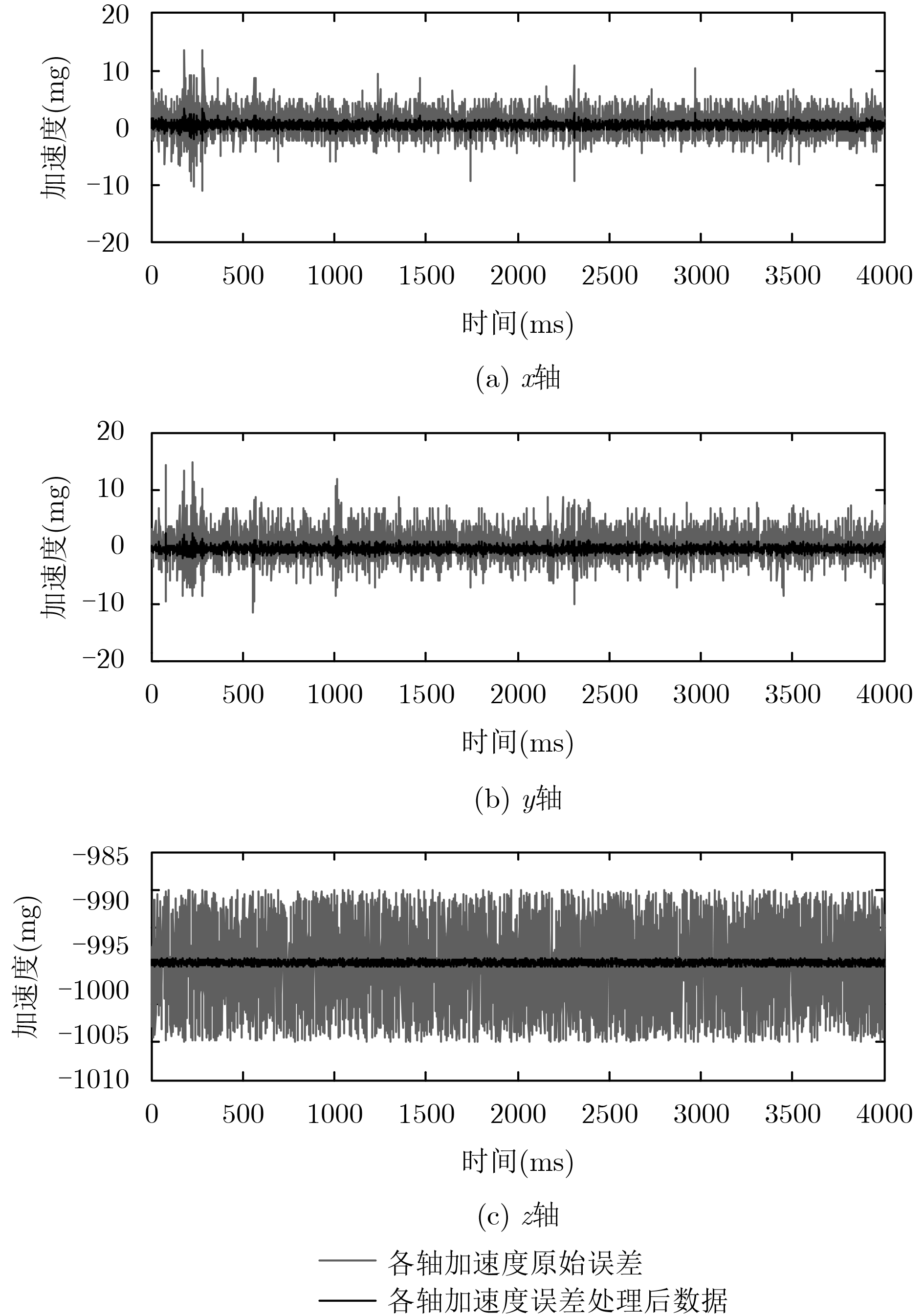
图 5 加速度对比
Figure 5.
-
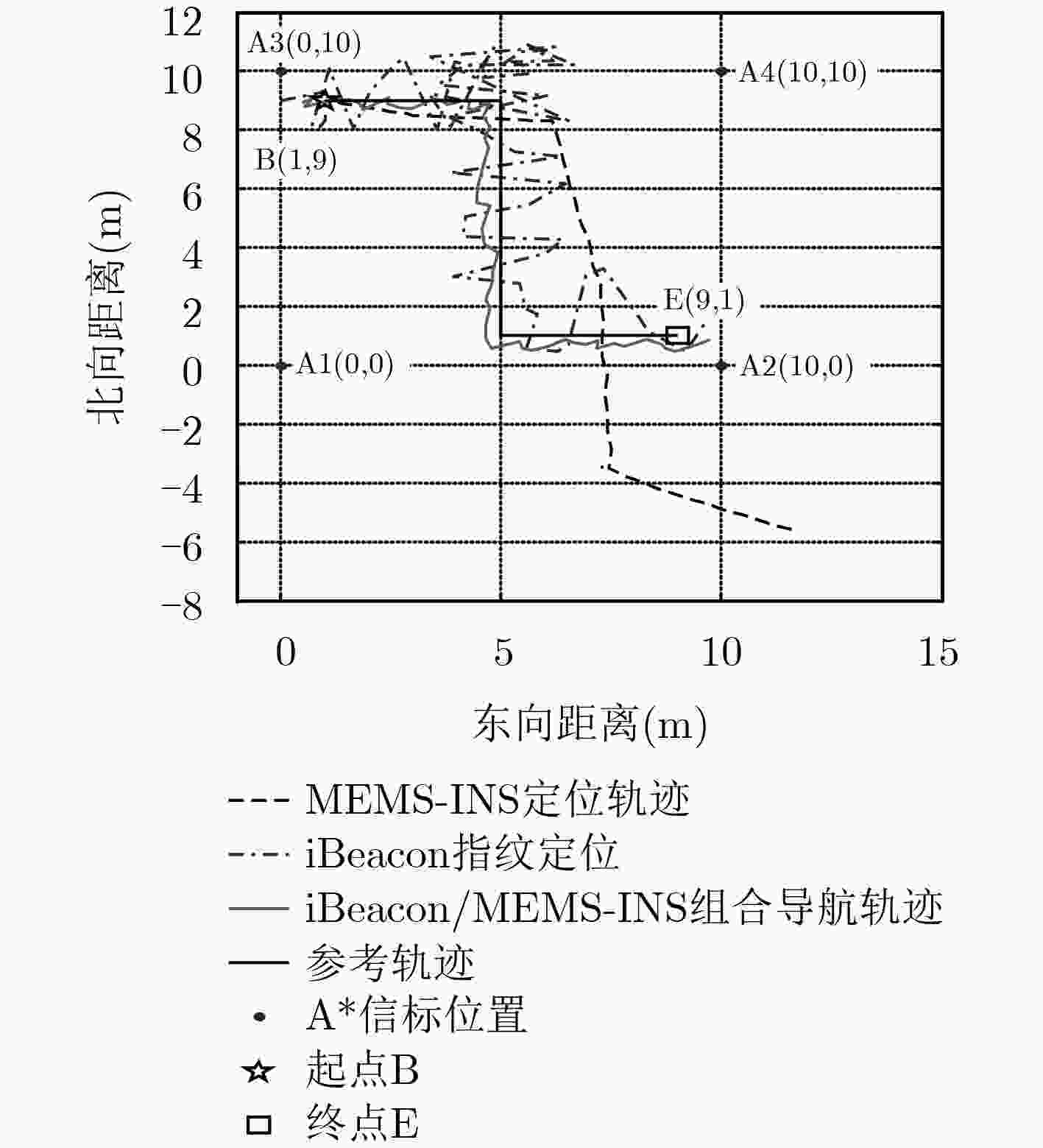
图 6 3种方法的定位轨迹
Figure 6.
-
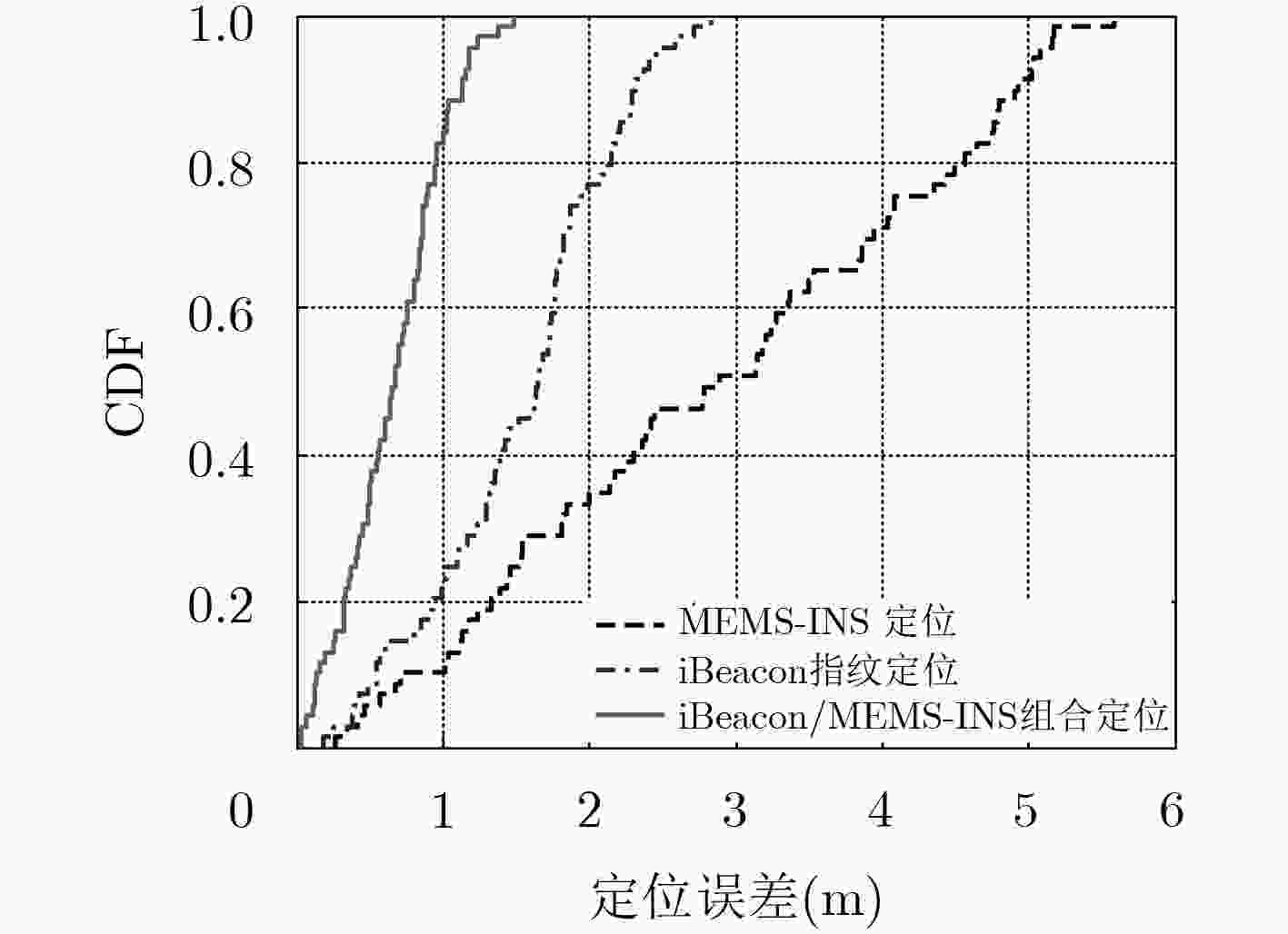
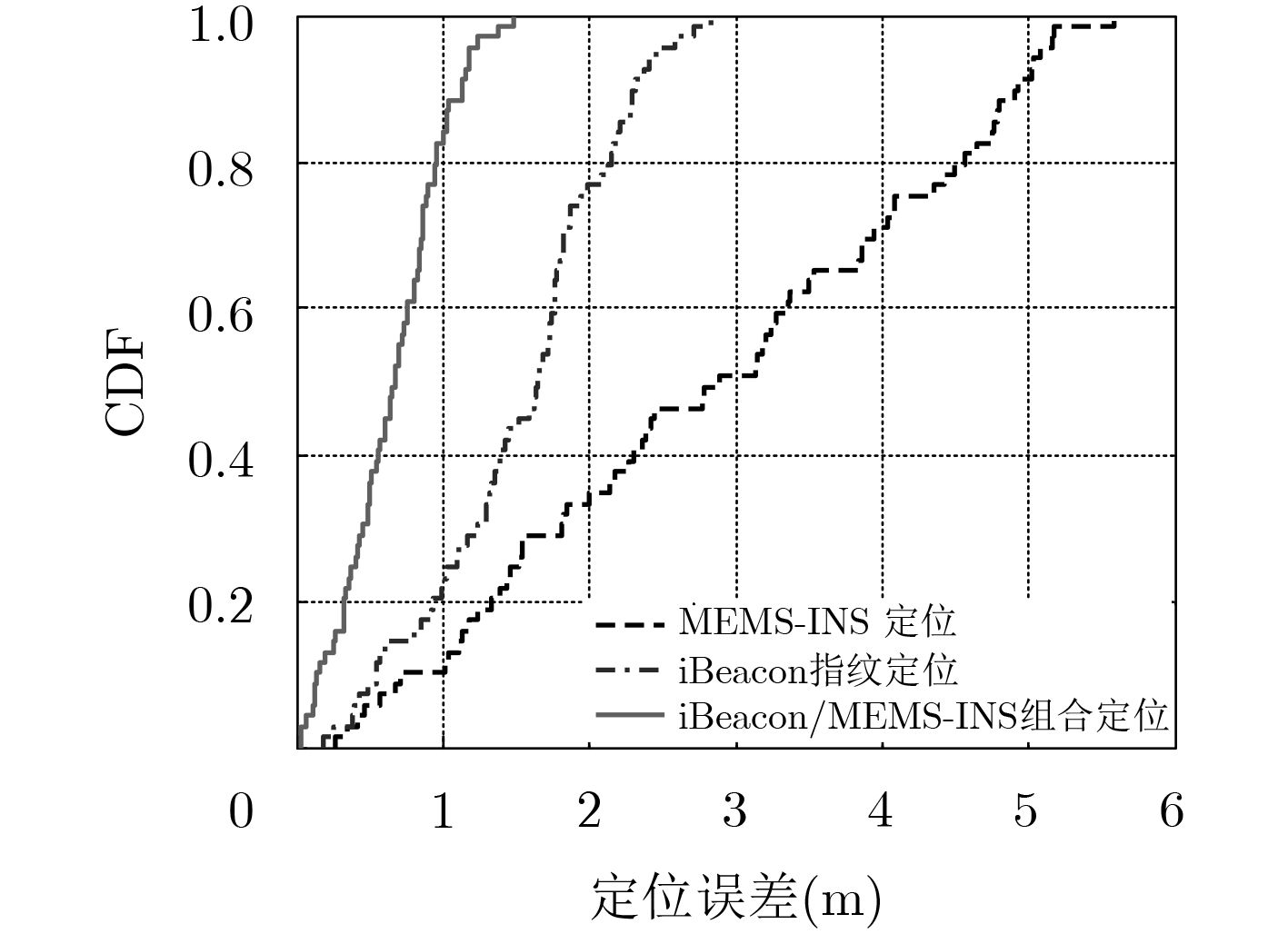
图 7 定位误差CDF
Figure 7.
-
加速度计 陀螺仪 磁力计 轴数 3 3 3 量程 ±8 g ±1.700 °/s ±1/104 特斯拉(T) 数据更新频率 100 Hz 100 Hz 100 Hz 表 1 3DM模块各项指标
-
方法 平均绝对位置误差(m) 运行时间(ms) MEMS-INS 6.758 0.054 iBeacon 3.523 0.023 BLE/MEMS跨楼层 1.545 0.407 iBeacon/MEMS-INS 1.315 0.468 表 2 多种方法的性能比较
图共
7 个 表共
2 个