-
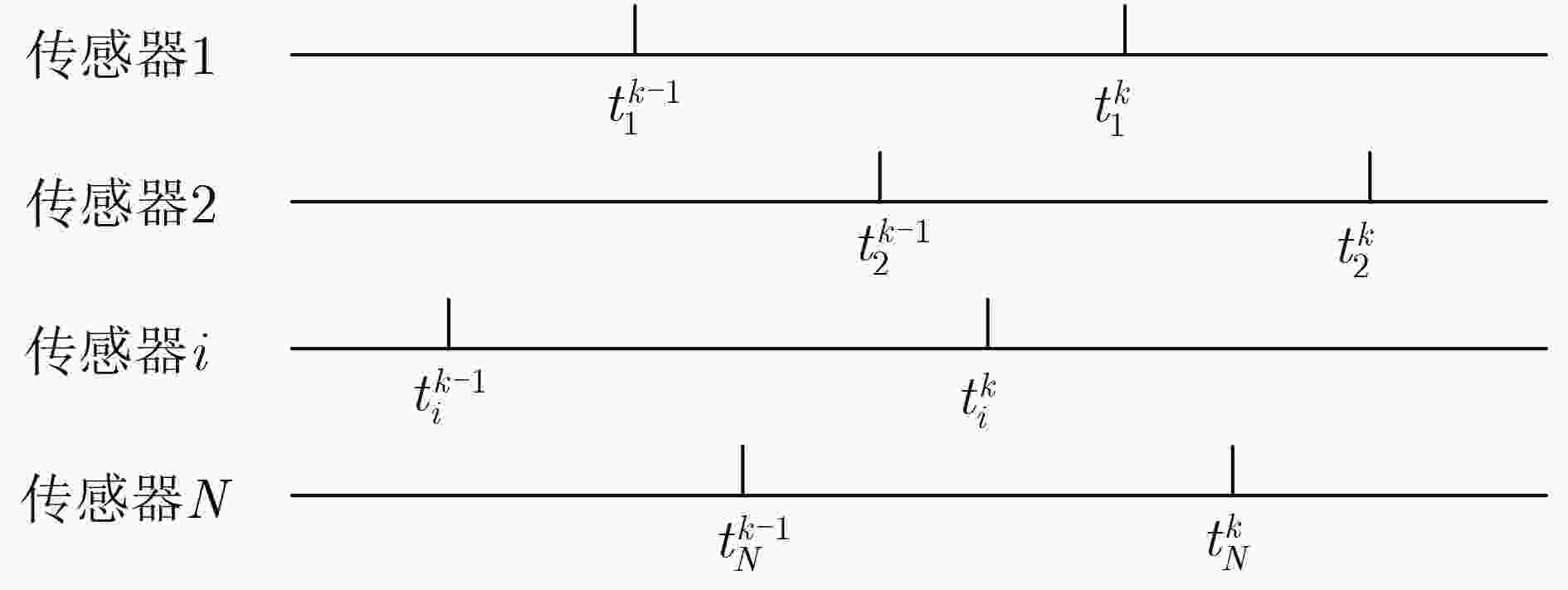
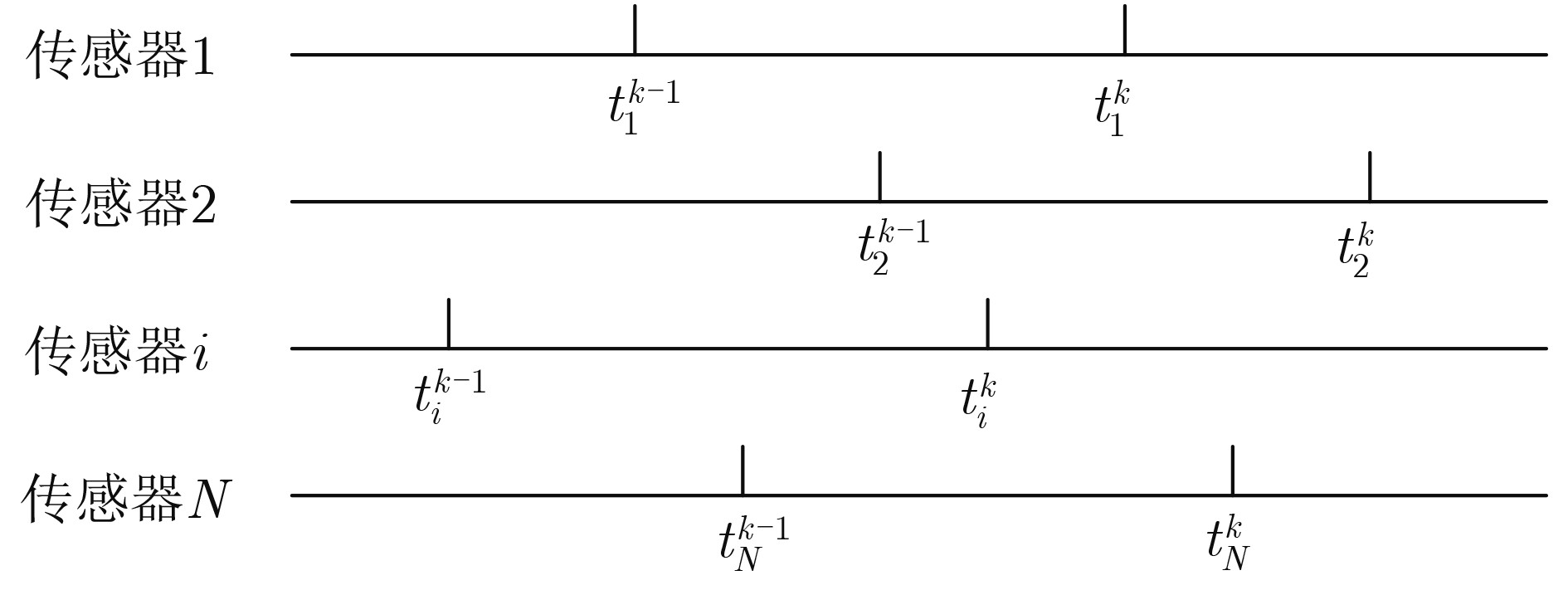
图 1 异步多传感器采样示意图
Figure 1.
-

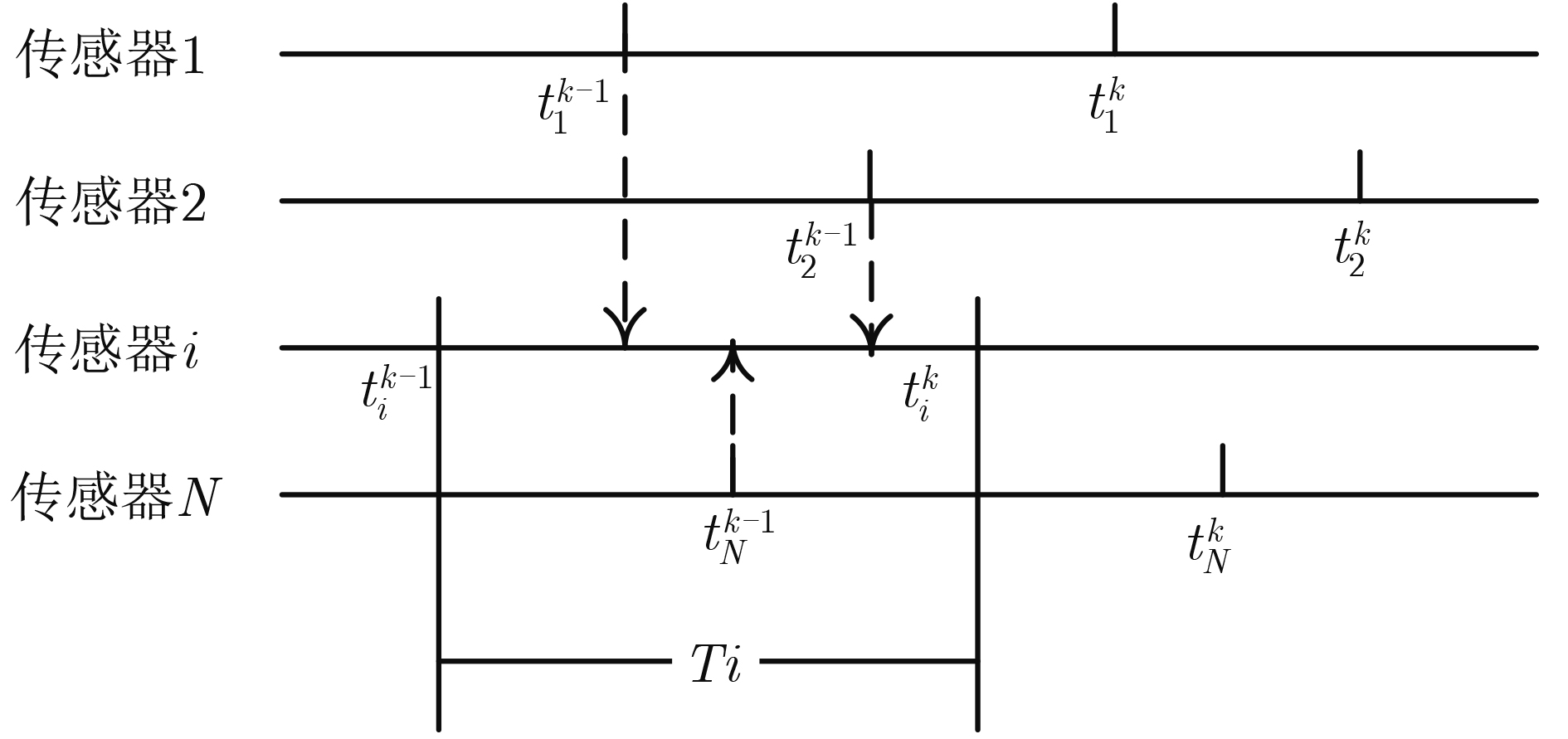
图 2 传感器i的入邻节点采样时刻映射示意图
Figure 2.
-
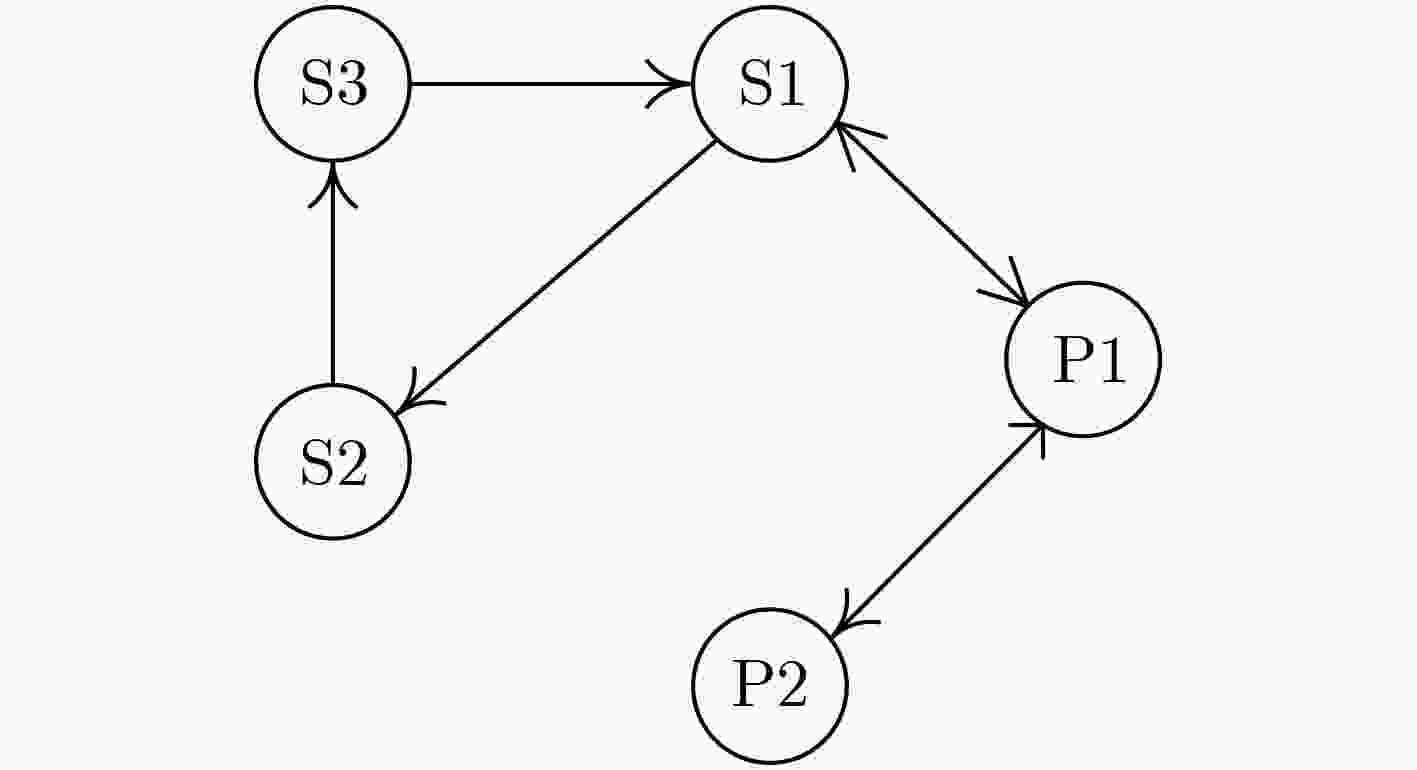
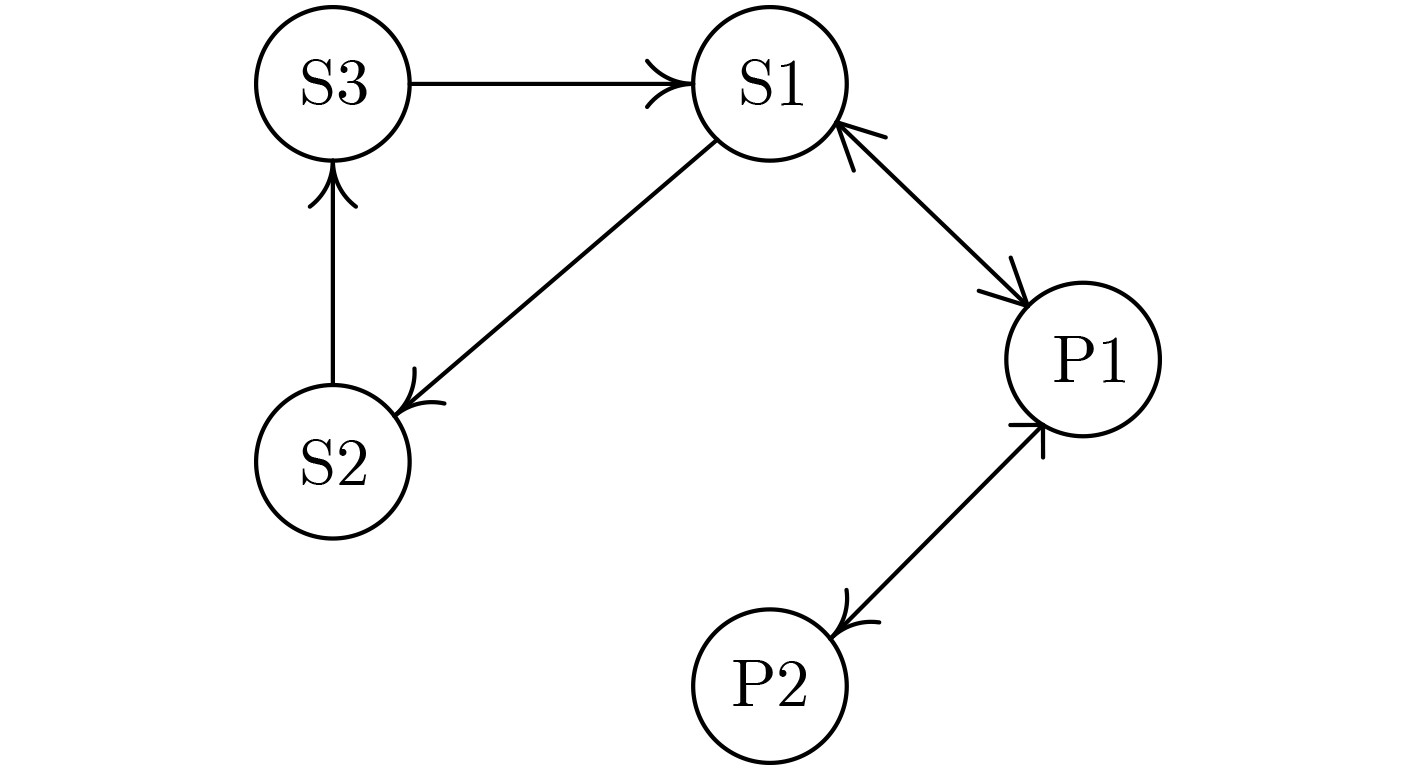
图 3 传感器网络的通信拓扑
Figure 3.
-
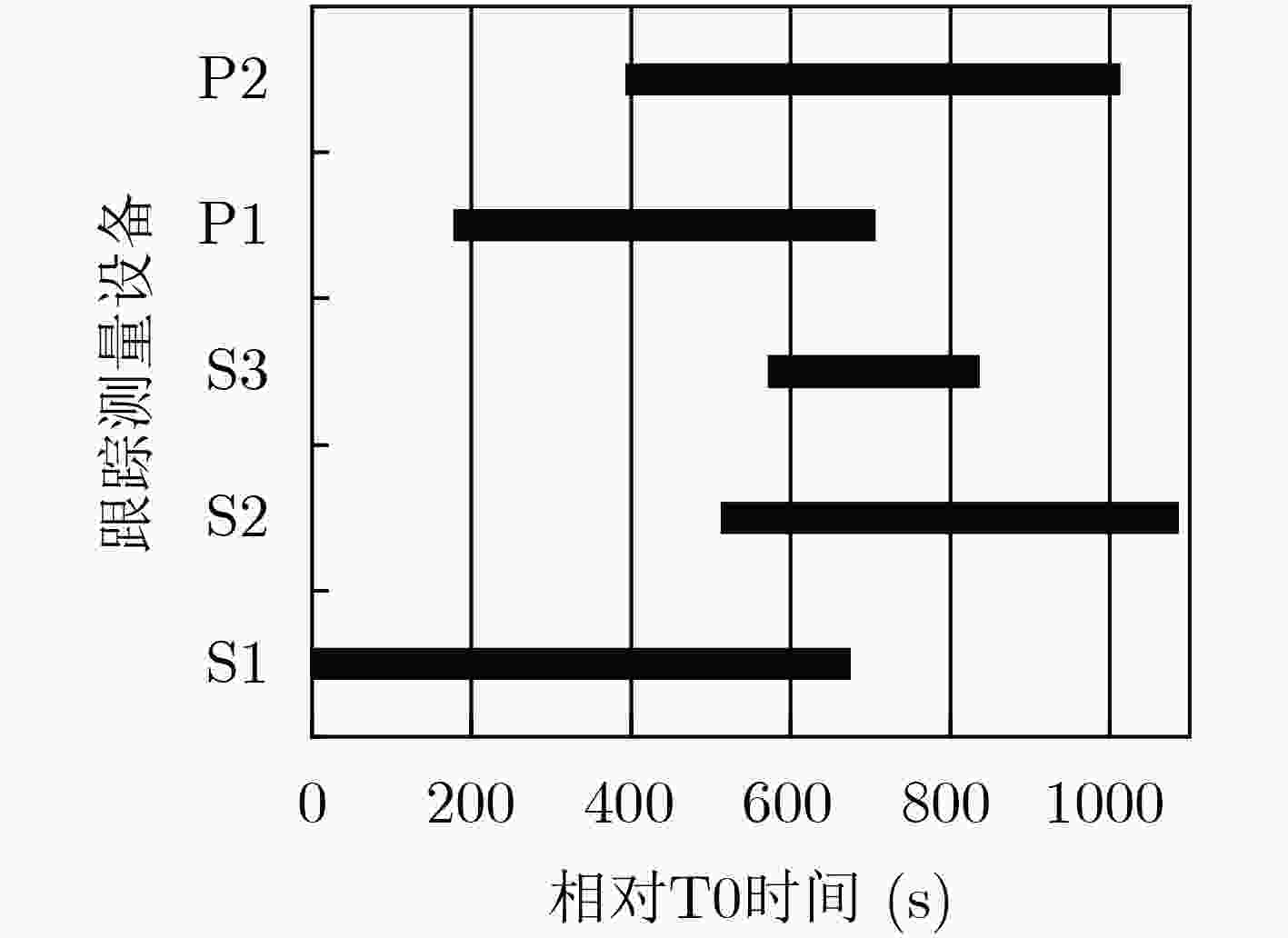
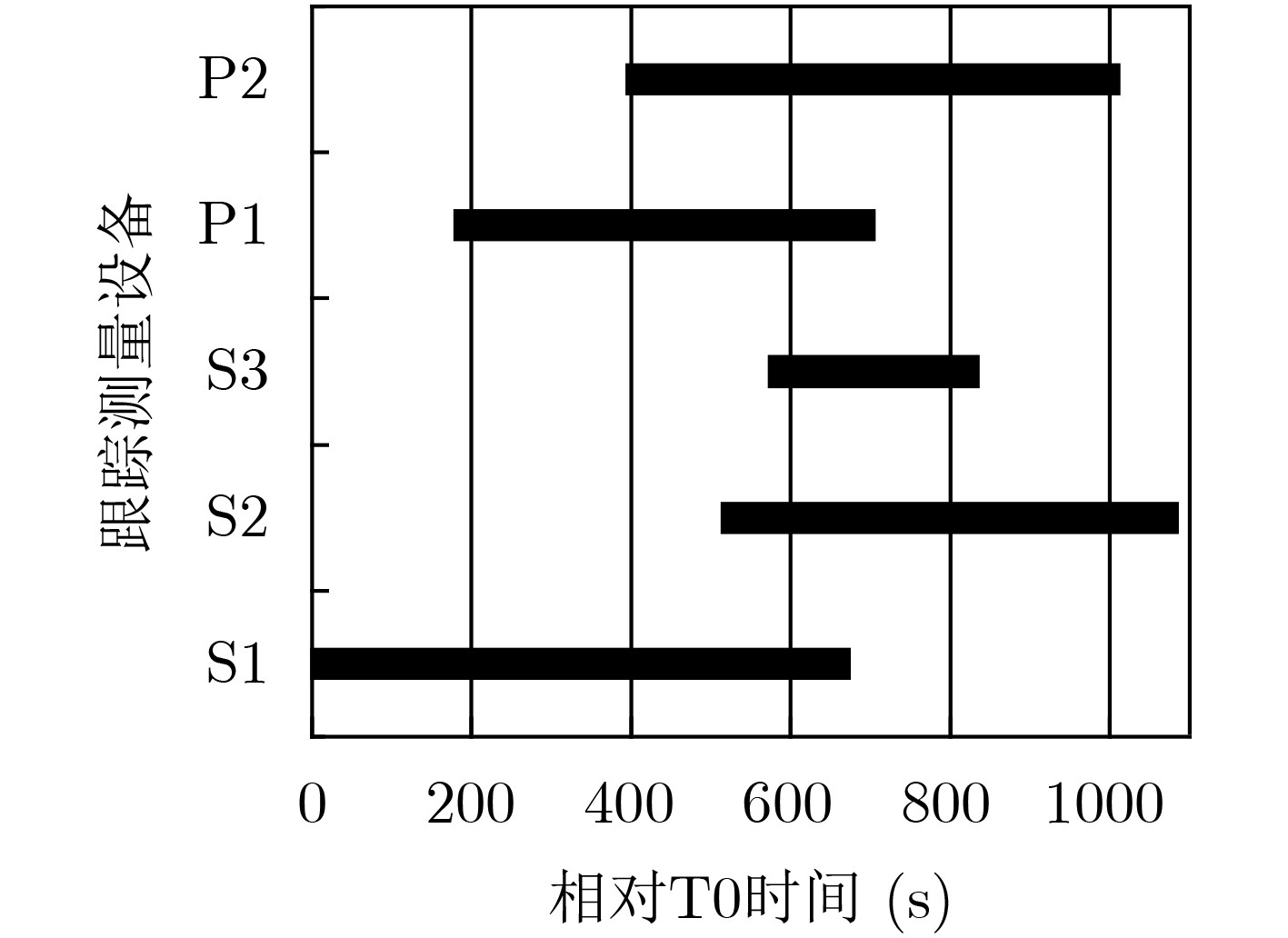
图 4 测量设备的跟踪弧段
Figure 4.
-
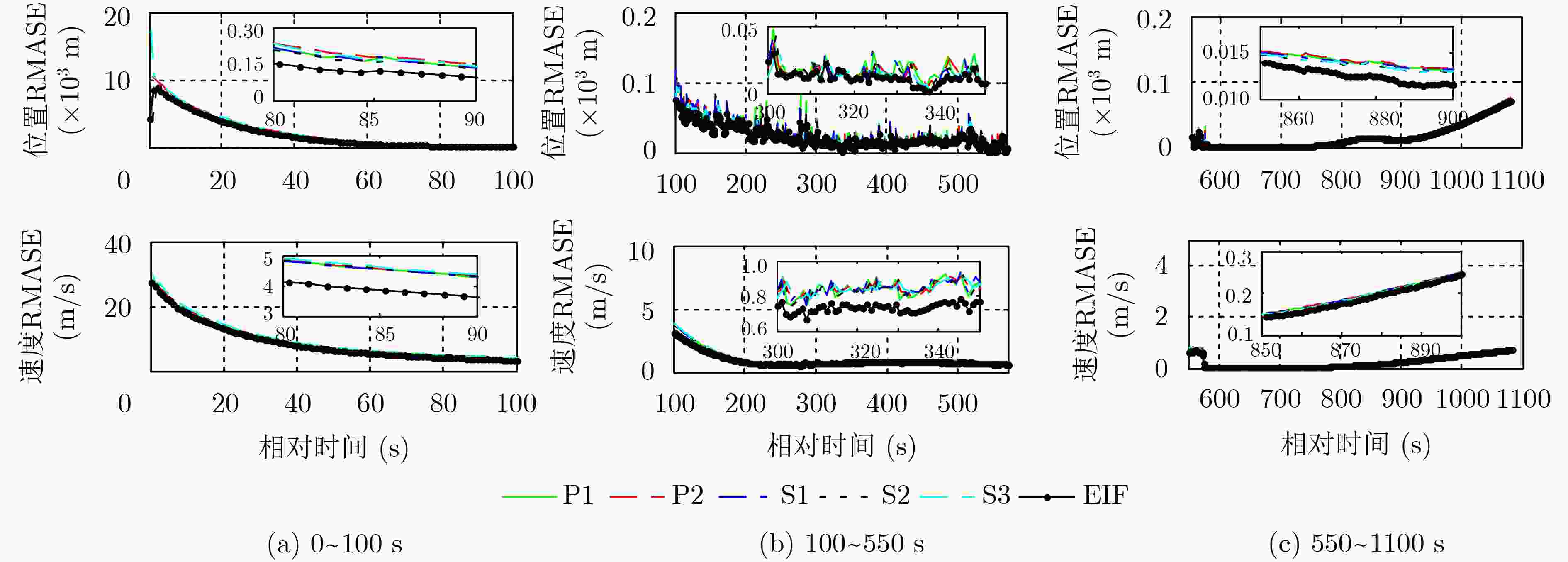
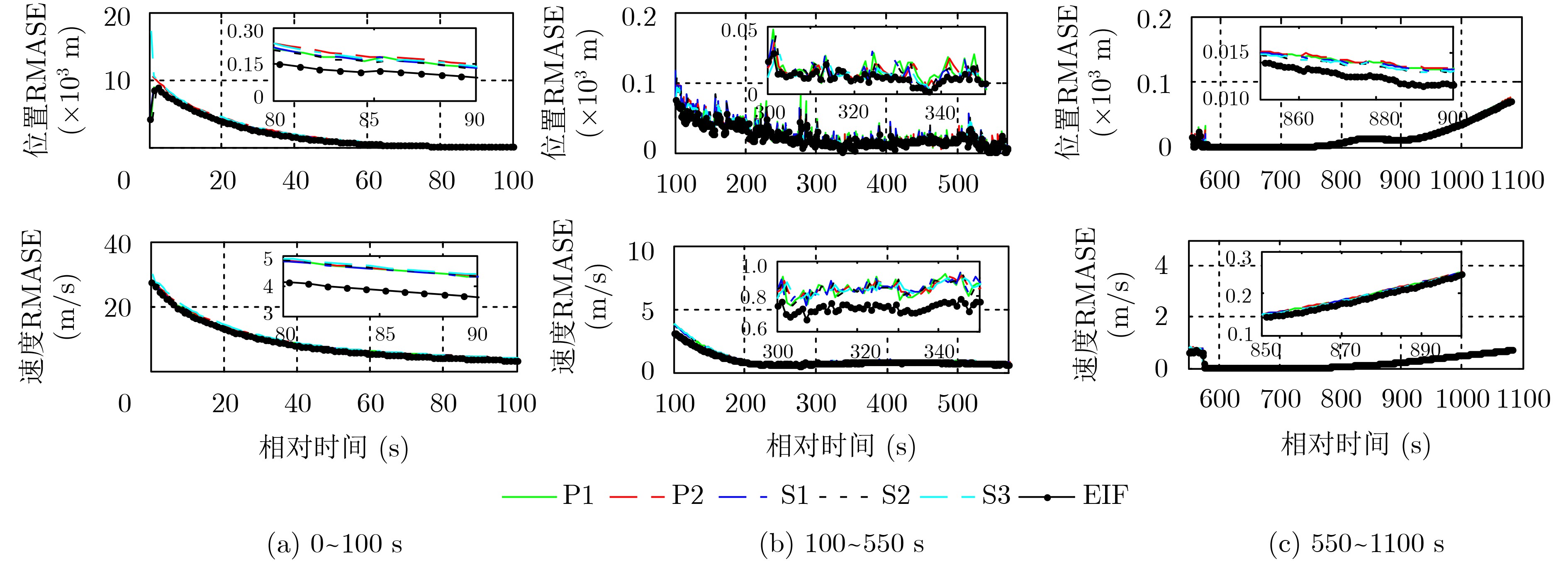
图 5 各测量设备计算的位置、速度RMSE曲线
Figure 5.
-
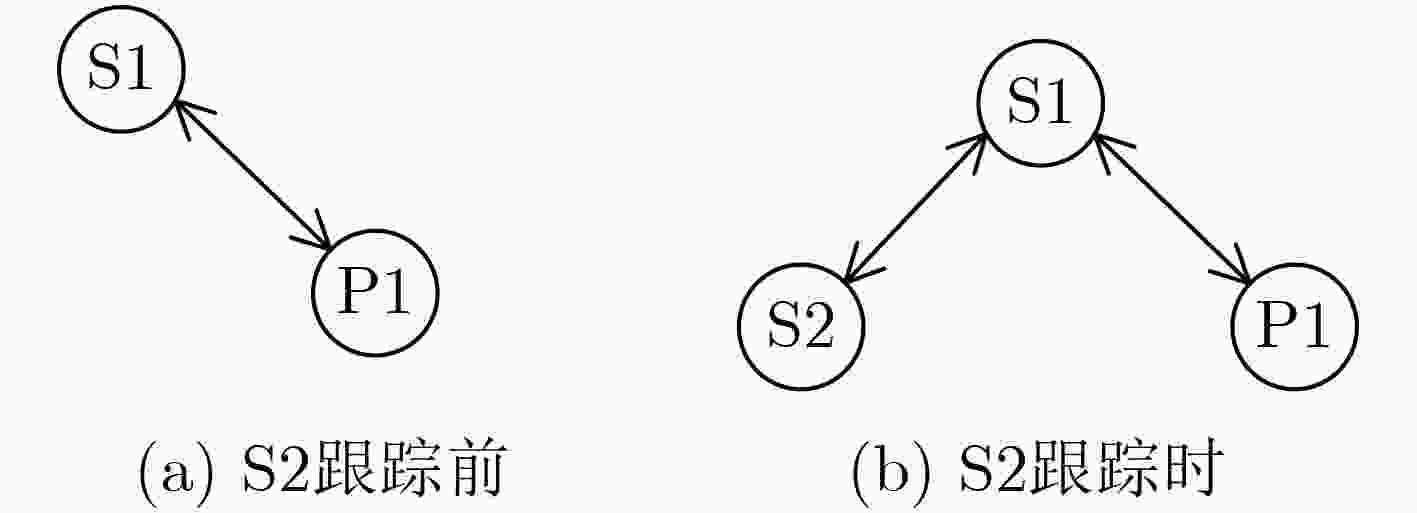
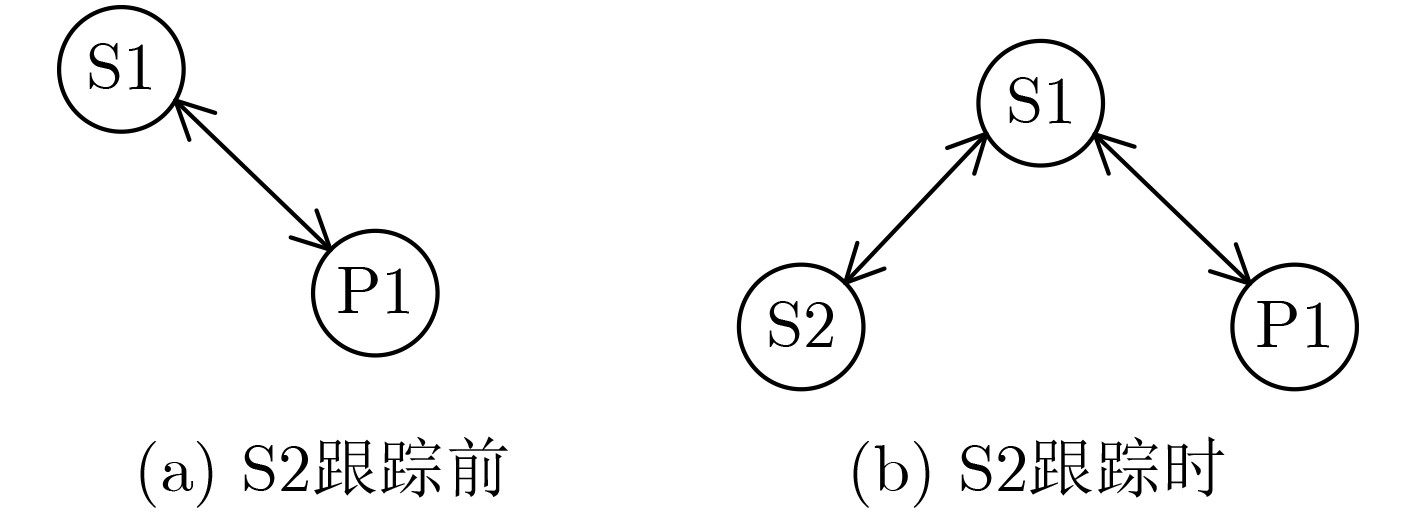
图 6 目标1传感器网络拓扑变化情况
Figure 6.
-
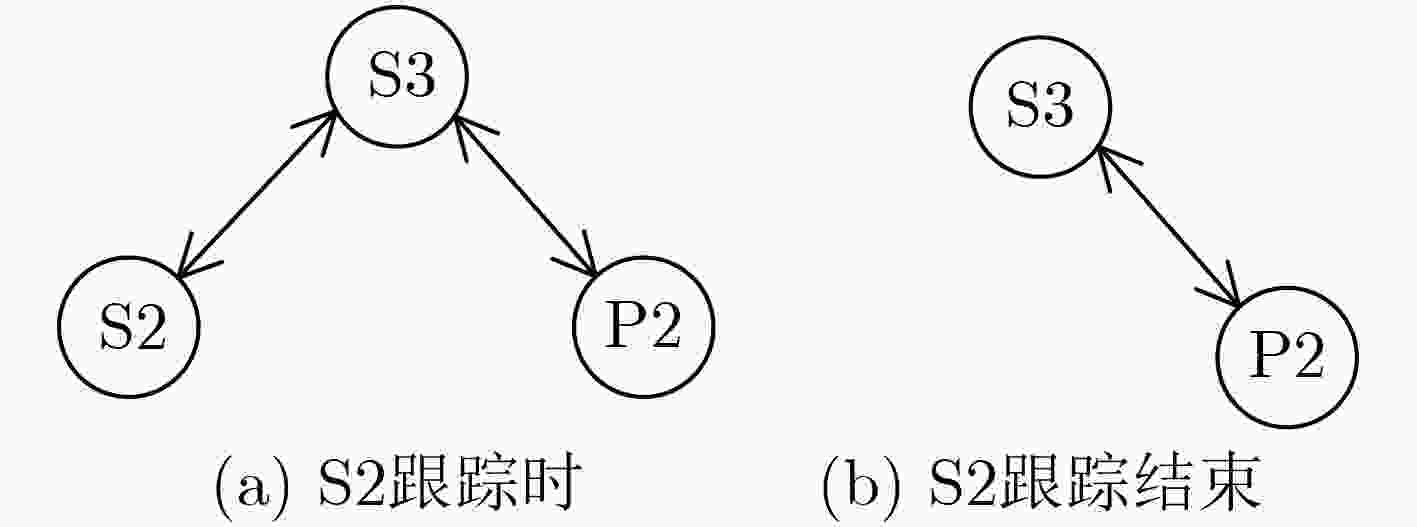
图 7 目标2传感器网络拓扑变化情况
Figure 7.
-
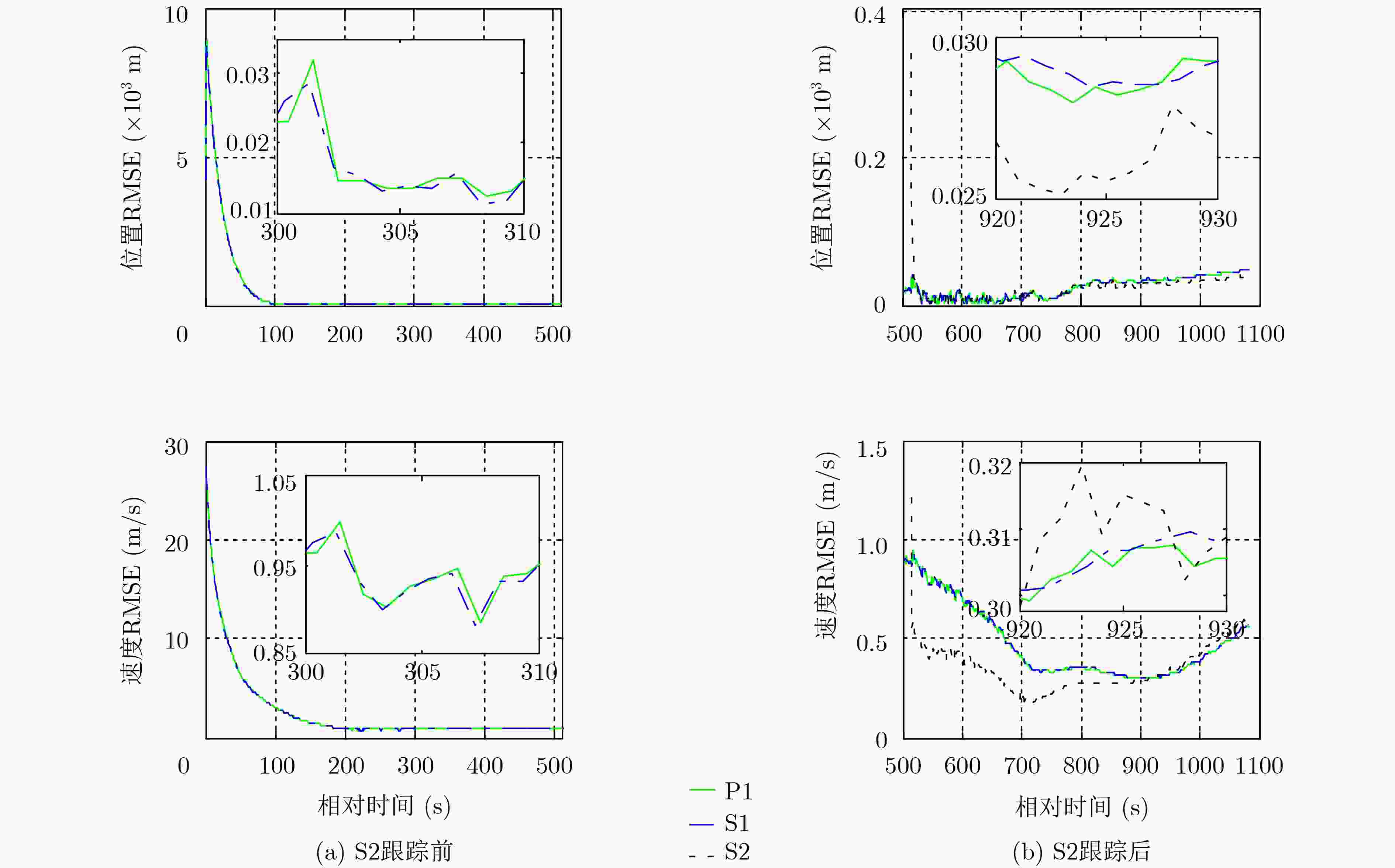
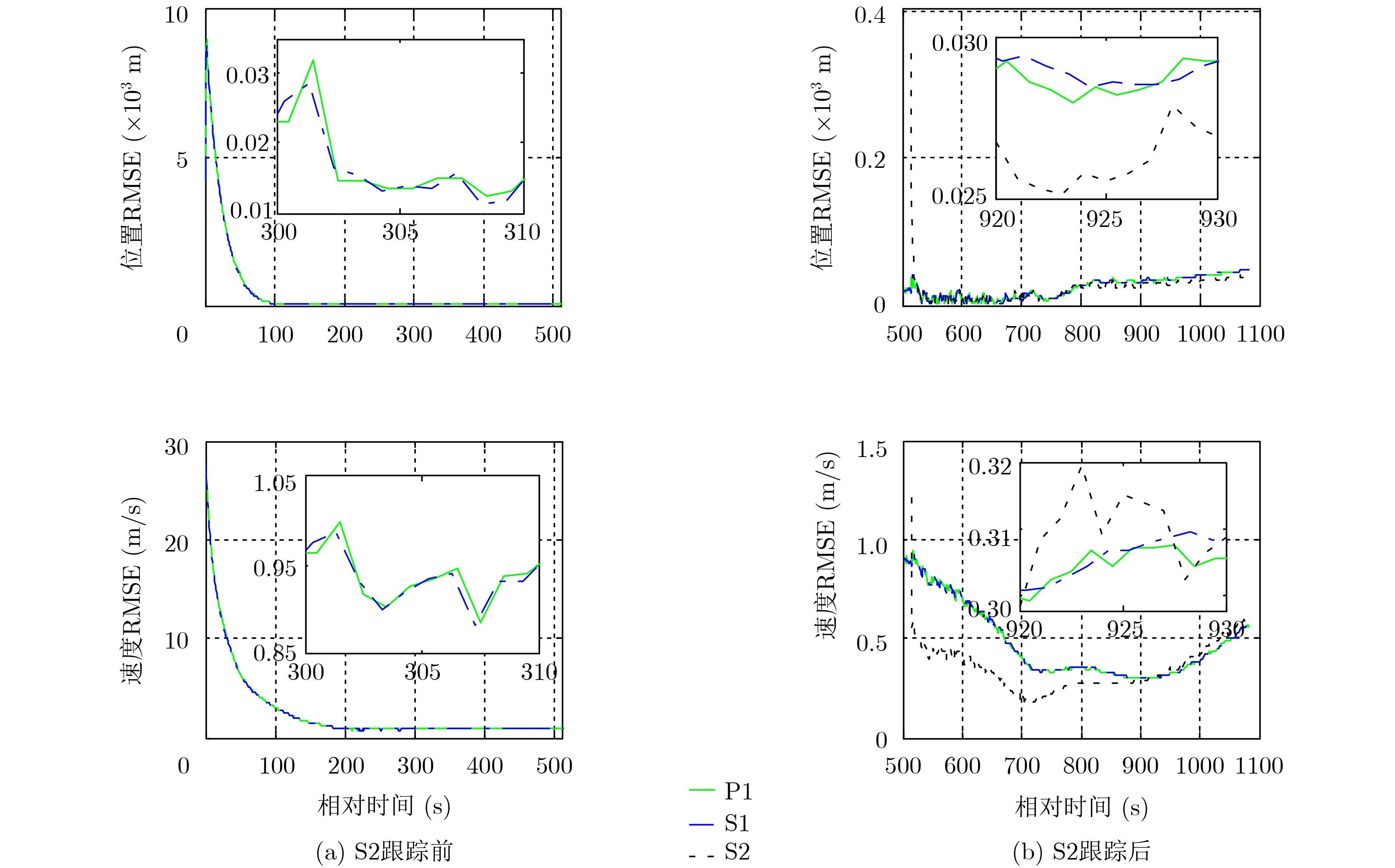
图 8 P1, S1, S2对目标1分布式滤波定轨的位置、速度RMSE曲线
Figure 8.
-
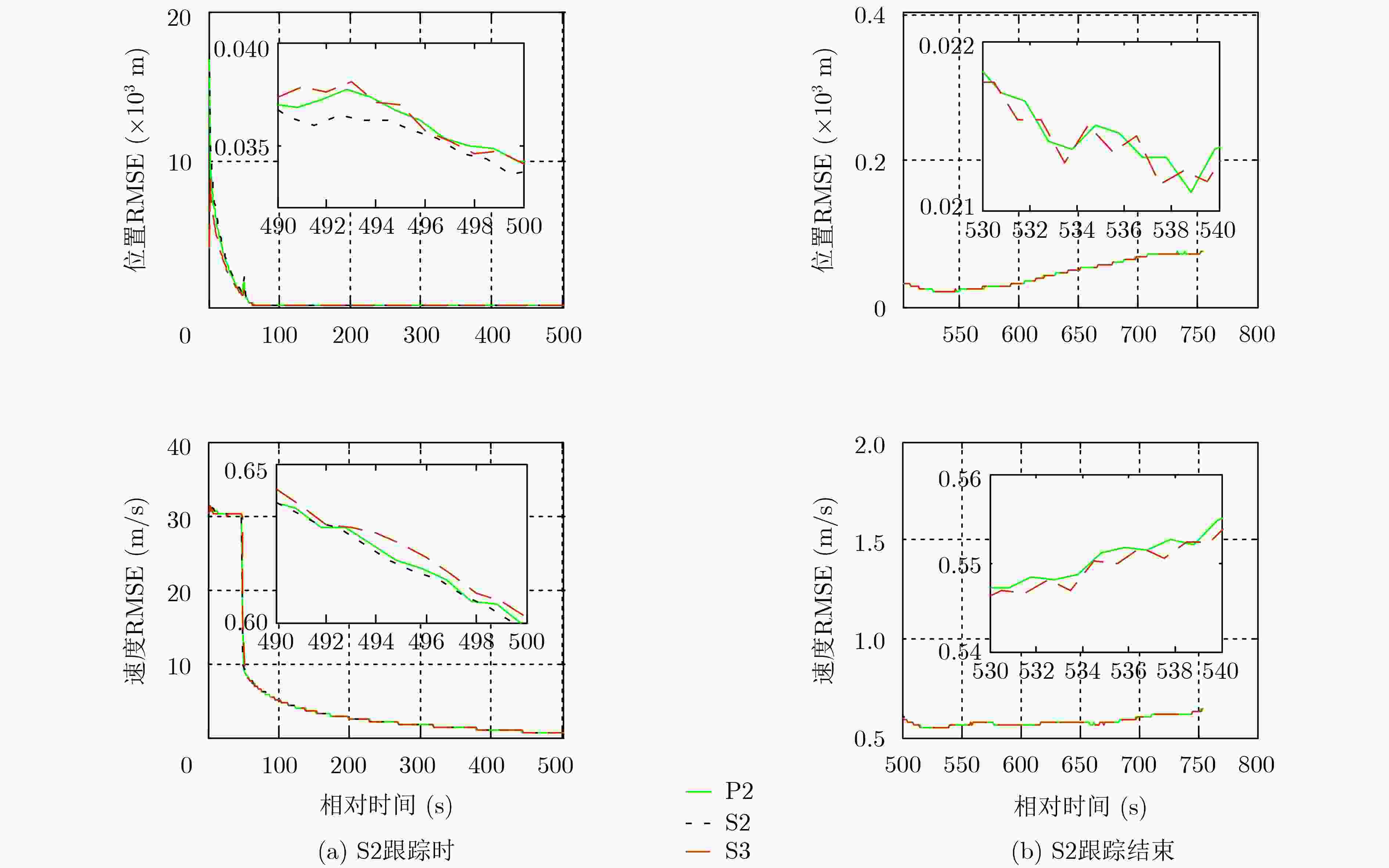
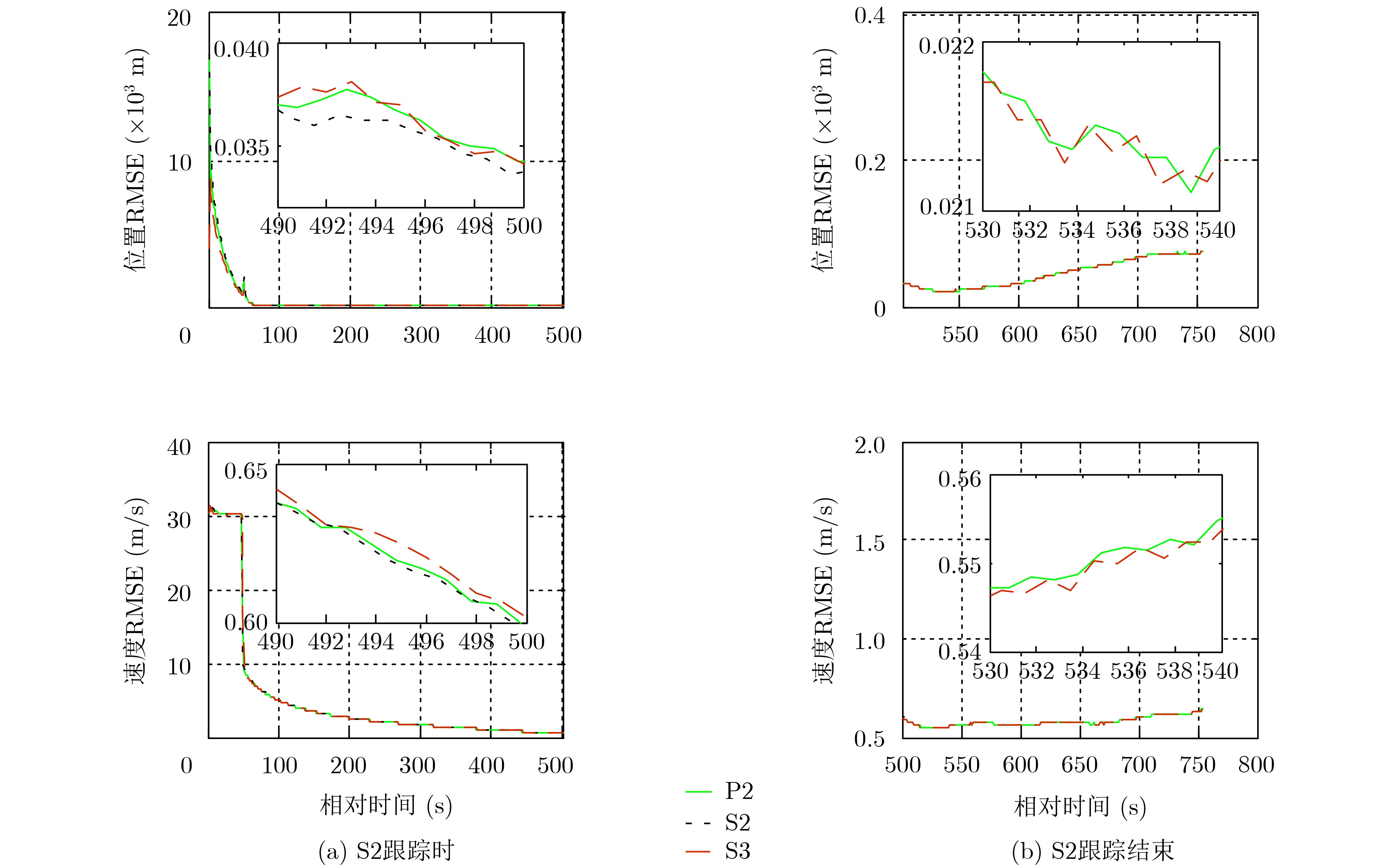
图 9 P2, S2, S3对目标2分布式滤波定轨的位置、速度RMSE曲线
Figure 9.
-
历元 X(m) Y(m) Z(m) Vx(m·s–1) Vy(m·s–1) Vz(m·s–1) 2019-04-25 04:11:56 980093.466 1709342.512 6698030.714 6293.741438 3734.785328 –1863.584480 表 1 目标初始轨道
-
天基相机 历元 a(km) e i(°) Ω(°) ω(°) M(°) P1 2019-4-25 04:00:00 6878.137 0.000011 45.0 359.8 0.0 339.8 P2 2019-4-25 04:00:00 6778.137 0.000010 63.4 250.1 10.2 35.0 表 2 天基光学相机轨道根数
-
滤波类型 P1 P2 S1 S2 S3 位置 ADIF(m) 11.4389 10.7740 11.6683 11.3893 10.9962 EIF(m) 9.6533 速度 ADIF(m/s) 0.4550 0.4563 0.4575 0.4564 0.4564 EIF(m/s) 0.3973 表 3 各测站集中式与分布式滤波位置平均RMSE
-
历元 X(m) Y(m) Z(m) Vx(m·s–1) Vy(m·s–1) Vz(m·s–1) 2019-04-25 04:00:55 6985582.028 542743.450 1003434.795 –966.305250 –1160.131728 –7350.707562 表 4 目标2初始轨道
图共
9 个 表共
4 个