-

图 1 多模型压缩跟踪算法框架(t 帧多模型选择策略)
Figure 1.
-

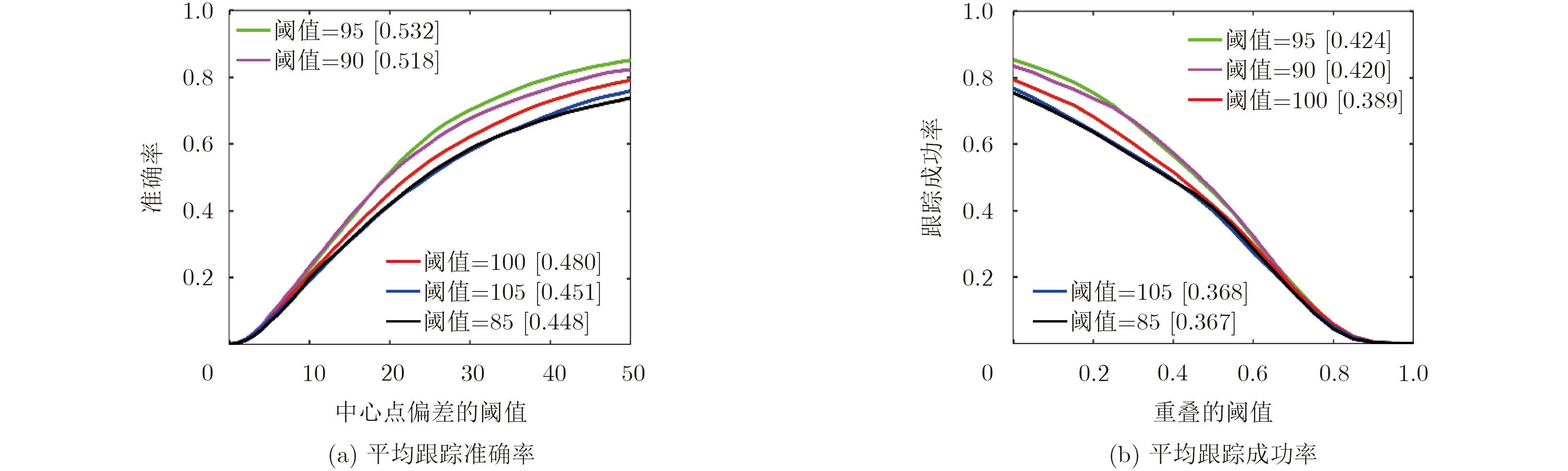
图 2 选取不同阈值的跟踪准确率与成功率
Figure 2.
-
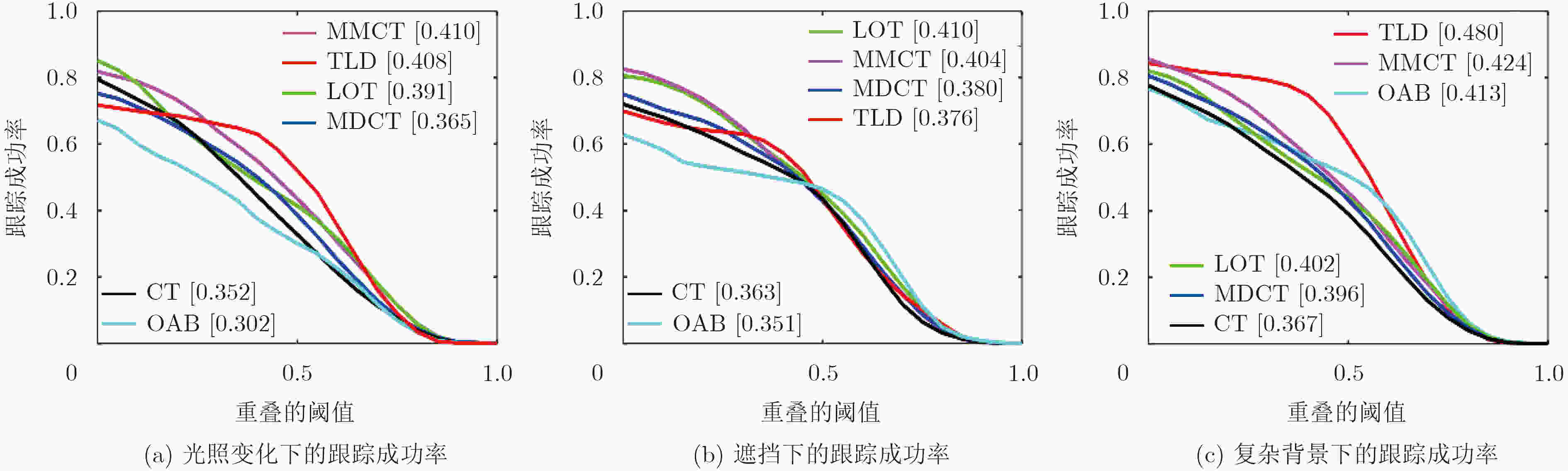
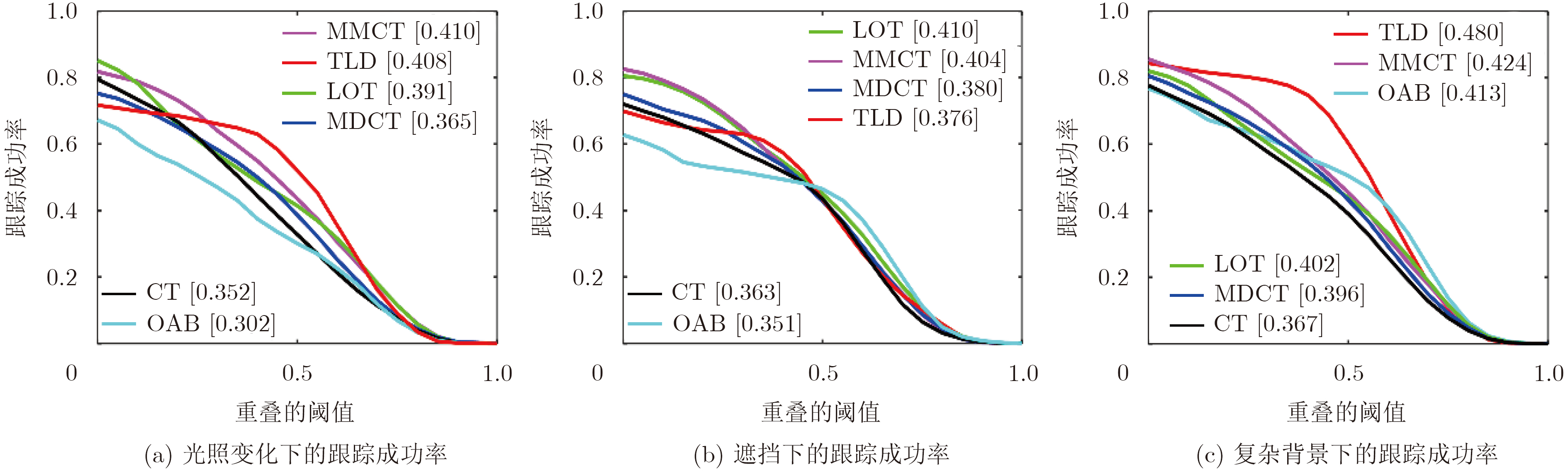
图 3 不同算法的跟踪成功率
Figure 3.
-

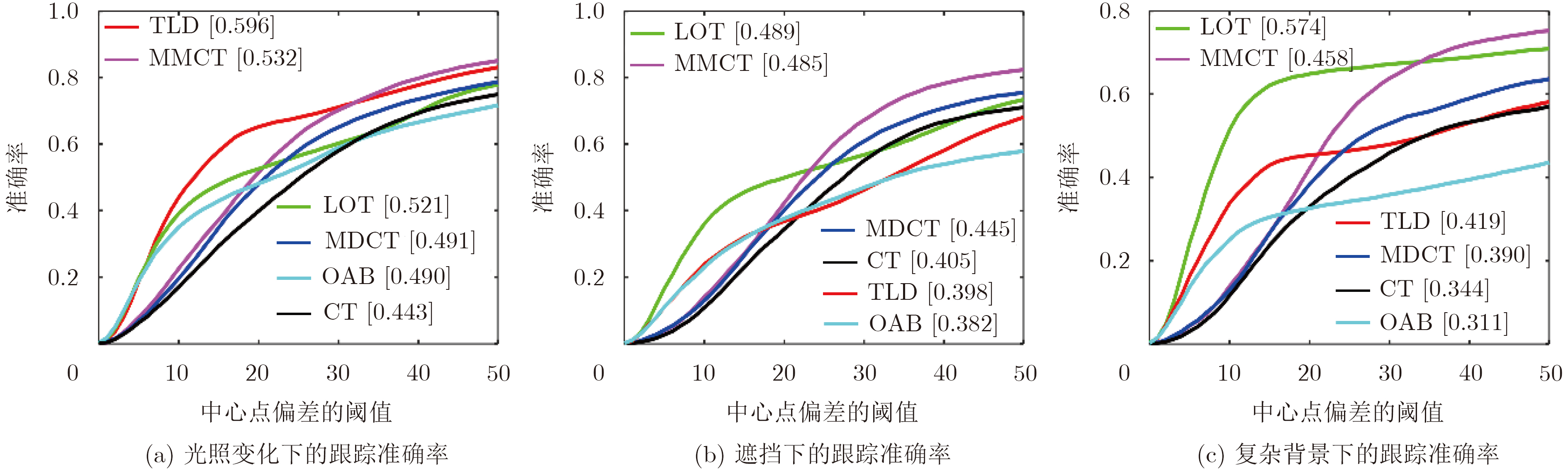
图 4 不同算法的跟踪准确率
Figure 4.
-
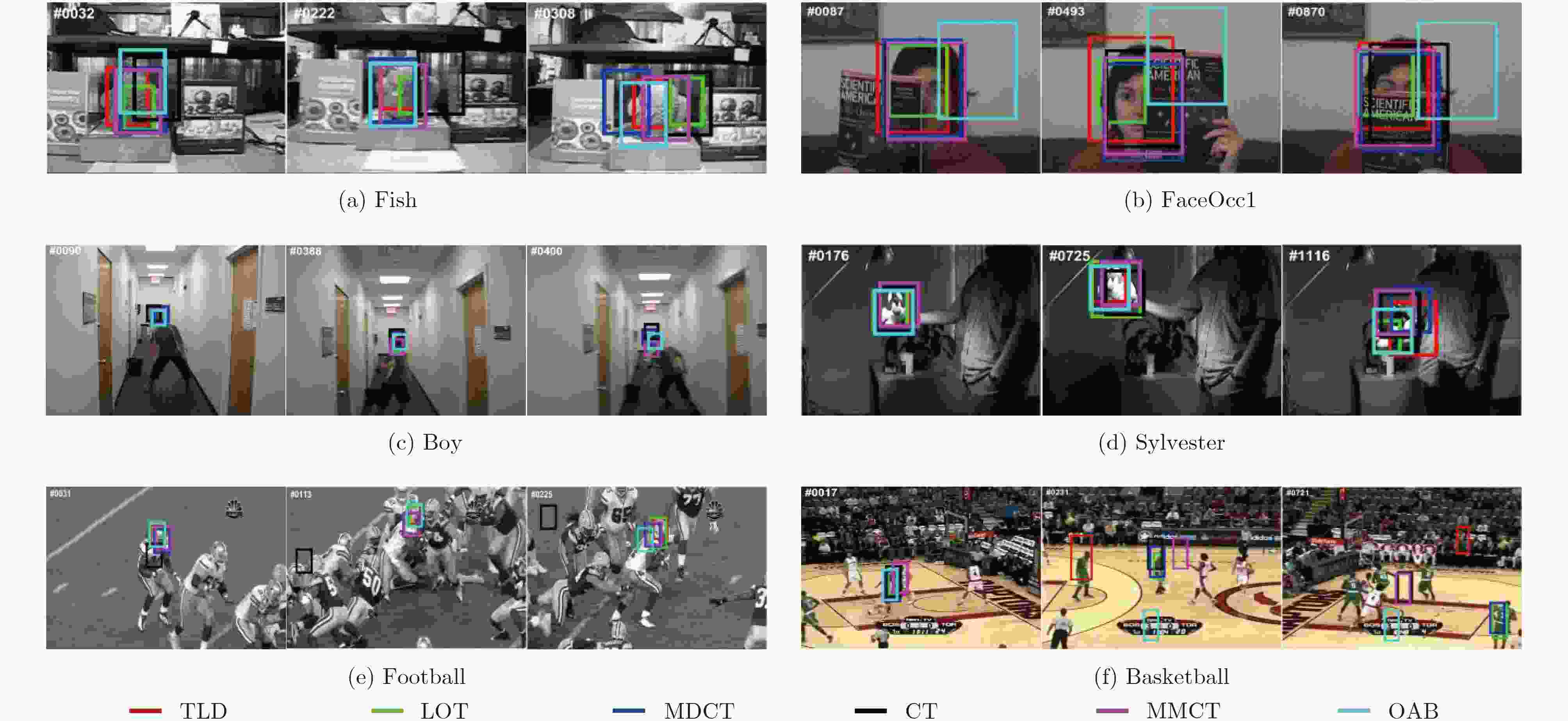
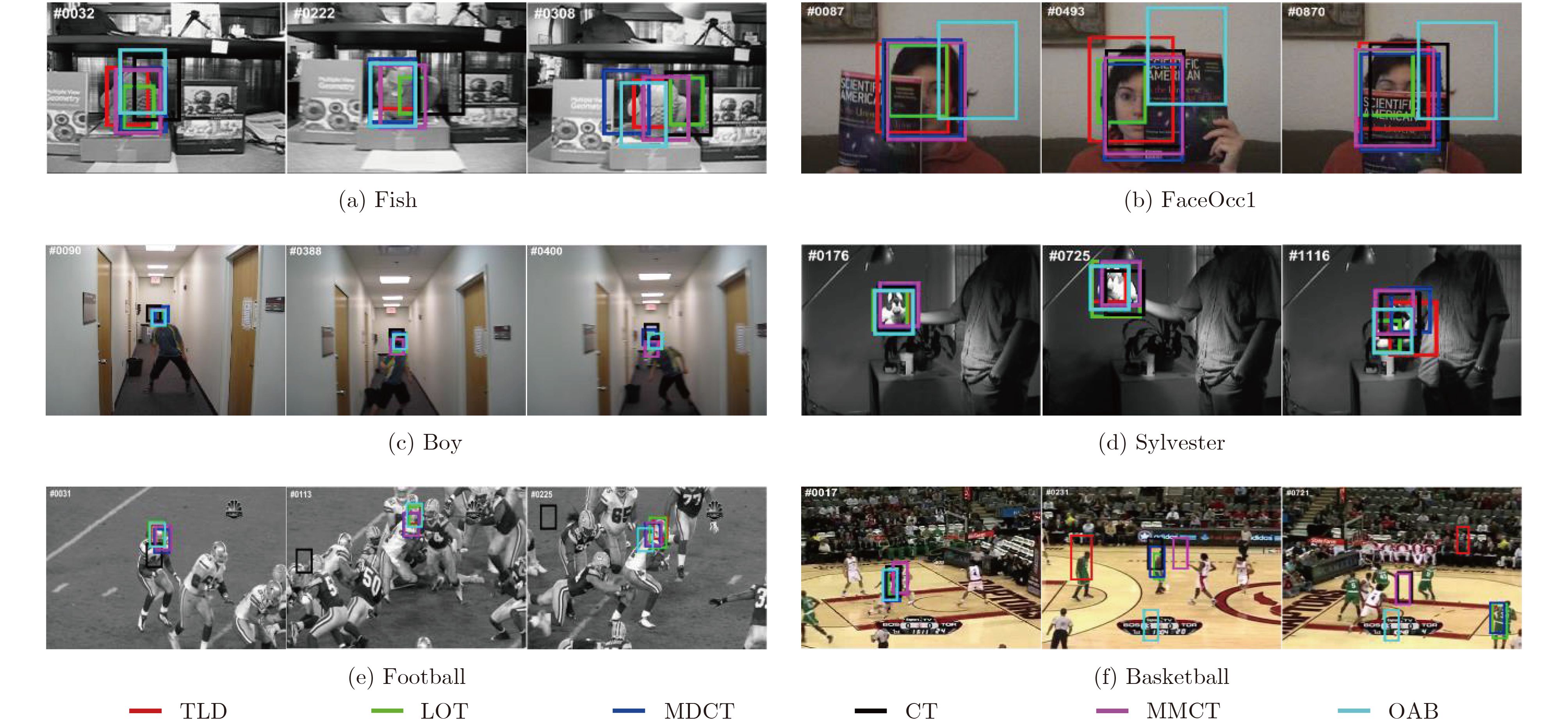
图 5 不同跟踪算法显示的结果
Figure 5.
-
输入:第t帧的图像 输出:第t帧的目标位置 (1) if $H_*^{t - 2}(\overset{\frown}{{{v}}} ) - H_*^{t - 1}(\overset{\frown}{{{v}}} ) > \theta $ && flag=0 (2) 利用 ${H_f}$及参数 $\{ \mu _f^1,\sigma _f^1,\mu _f^0,\sigma _f^0\} $进行定位 $L_t^{} = {\rm{Loc}}({H_f}(\overset{\frown}{{{v}}} ))$,初始 化学习率 ${\lambda _f}$; (3) 采集正、负样本,利用 ${\lambda _o}$更新 ${H_f}$分类器, ${\lambda _f}$更新 ${H_o}$分类器; (4) 设置flag=1,转入第(16)步处理第 $t + 1$帧; (5) end if (6) if $H_*^{t - 1}(\overset{\frown}{{{v}}} ) - H_*^{t - 2}(\overset{\frown}{{{v}}} ) > \theta $ && flag=0 (7) 利用 ${H_b}$及参数 $\{ \mu _b^1,\sigma _b^1,\mu _b^0,\sigma _b^0\} $进行定位 $L_t^{} = {\rm{Loc}}({H_b}(\overset{\frown}{{{v}}} ))$,初始 化学习率 ${\lambda _{b}}$; (8) 采集正、负样本,利用 ${\lambda _o}$更新 ${H_b}$分类器, ${\lambda _{b}}$更新 ${H_o}$分类器; (9) 设置flag=1,转入第(16)步处理第(t+1)帧; (10) end if (11) if$\left| {H_*^{t - 2}(\overset{\frown}{{{v}}} ) - H_*^{t - 1}(\overset{\frown}{{{v}}} )} \right| \le \theta $ && flag=0 (12) 将 ${H_o}$参数保存至 ${H_f}$及 ${H_b}$; (13) 在第 $t$帧确定目标的位置为 $L_t^{} = {\rm{Loc}}({H_o}(\overset{\frown}{{{v}}} ))$,使用学习率 ${\lambda _o}$按照式(4)更新 ${H_o}$分类器; (14) 转入第(1)步处理第 $t + 1$帧; (15) end if (16) if $H_*^{t - 2}(\overset{\frown}{{{v}}} ) - H_*^{t - 1}(\overset{\frown}{{{v}}} ) > \theta $ && flag=1 (17) 利用 ${H_f}$及 $\{ \mu _f^1,\sigma _f^1,\mu _f^0,\sigma _f^0\} $定位 $L_t^{} = {\rm{Loc}}({H_f}(\overset{\frown}{{{v}}} ))$; (18) 采集正、负样本,利用 ${\lambda _o}$更新 ${H_f}$分类器; (19) 按照式(10)更新学习率 ${\lambda _f}$,使用学习率 ${\lambda _f}$更新 ${H_o}$分类器; (20) 转入第(16)步处理第 $t + 1$帧; (21) end if (22) if $H_*^{t - 1}(\overset{\frown}{{{v}}} ) - H_*^{t - 2}(\overset{\frown}{{{v}}} ) > \theta $ && flag=1 (23) 利用 ${H_b}$及 ${\rm{\{ }}\mu _b^1,\sigma _b^1,\mu _b^0,\sigma _b^0{\rm{\} }}$定位 $L_t^{} = {\rm{Loc}}({H_b}(\overset{\frown}{{{v}}} ))$; (24) 采集正、负样本,利用 ${\lambda _o}$更新 ${H_b}$分类器; (25) 按照式(10)更新学习率 $\lambda_b $,使用学习率 ${\lambda _{b}}$更新 ${H_o}$分类器; (26) 转入第(16)步处理第 $t + 1$帧; (27) end if (28) if $\left| {H_*^{t - 1}(\overset{\frown}{{{v}}} ) - H_*^{t - 2}(\overset{\frown}{{{v}}} )} \right| \le \theta $ && flag=1 (29) 将 ${H_o}$参数保存至 ${H_f}$及 ${H_b}$; (30) 确定目标位置为 $L_t^{} = {\rm{Loc}}({H_o}(\overset{\frown}{{{v}}} ))$,利用学习率 ${\lambda _o}$按照式 (4)更新 ${H_o}$分类器; (31) 设置学习率 ${\lambda _f} = 0$和 ${\lambda _{b}} = {\lambda _o}$,将flag设置为0,转到第(1)步 处理第 $t + 1$帧; (32) end if 表 1 基于多模型的实时压缩跟踪算法
-
图像序列 TLD[8] LOT[5] OAB[7] CT[9] MDCT[10] MMCT Fish 0.49 0.25 0.44 0.21 0.48 0.45 Sylvester 0.63 0.52 0.57 0.60 0.49 0.57 Faceocc1 0.55 0.40 0.17 0.68 0.70 0.66 Boy 0.57 0.41 0.75 0.30 0.28 0.24 Basketball 0.07 0.45 0.05 0.13 0.11 0.28 Football 0.56 0.54 0.41 0.09 0.27 0.64 平均成功率 0.48 0.43 0.40 0.34 0.39 0.47 表 2 跟踪成功率
-
图像序列 TLD LOT OAB CT MDCT MMCT Fish 13.20 29.30 22.50 41.85 26.41 24.69 Sylvester 10.39 13.10 13.40 12.12 18.64 14.00 Faceocc1 30.63 34.20 89.34 21.81 21.16 23.92 Boy 7.91 72.34 3.70 20.21 60.66 66.65 Basketball 127.97 69.28 141.02 91.79 145.18 45.77 Football 13.40 9.21 22.63 227.90 23.59 7.4 平均偏差率 33.92 37.91 48.77 69.30 49.27 30.41 平均帧率 15.92 0.48 5.26 74.70 72.85 74.60 表 3 中心偏差率及平均帧率
图共
5 个 表共
3 个