-
图 1 时空交叉点
Figure 1.
-
图 2 测试数据1中雷达原始航迹示意
Figure 2.
-

图 3 算法补偿后测试数据1中雷达航迹示意
Figure 3.
-

图 4 测试环境2中雷达原始航迹示意
Figure 4.
-
图 5 测试环境2中算法补偿后雷达航迹示意
Figure 5.
-
图 6 测试环境3中雷达原始航迹示意
Figure 6.
-
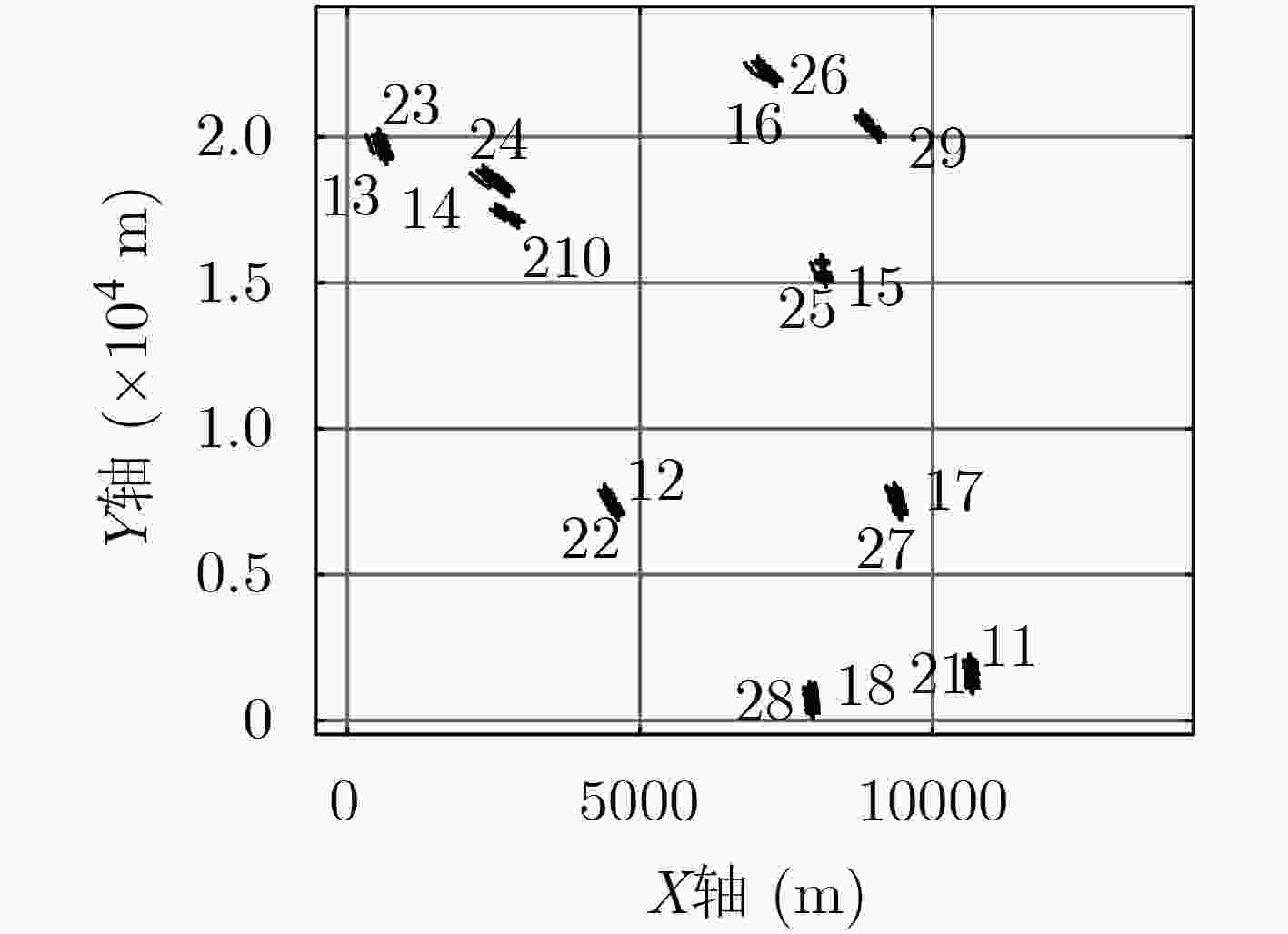
图 7 测试环境3中算法补偿后雷达航迹示意
Figure 7.
-
雷达1批号 11 12 雷达2批号 21 22 空间误差估计(m) 580.14 878.56 580.14 878.56 表 1 测试数据1下傅里叶算法关联结果
-
雷达1批号 15 13 11 12 雷达2批号 25 23 21 22 关联系数 0.657 0.657 0.648 0.503 时间误差估计(s) 30.31 30.31 25.42 29.57 空间误差估计(m) 525.22 819.61 525.22 819.61 571.18 813.87 468.00 825.56 表 2 测试数据1下交叉点算法关联结果
-
雷达1批号 13 雷达2批号 23 空间误差估计(m) 5310.32 8605.41 表 3 测试数据2下傅里叶算法关联结果
-
雷达1批号 13 15 14 雷达2批号 23 25 24 关联系数 0.845 0.845 0.835 时间误差估计 89.03 89.03 86.17 空间误差估计 4876.42 7953.41 4876.42 7953.41 5053.34 8036.30 表 4 测试环境2下交叉点算法关联结果
-
雷达1批号 17 12 11 18 14 13 16 15 雷达2批号 27 22 21 28 24 23 26 25 表 5 测试环境3下交叉差算法关联结果
-
雷达1批号 11 18 16 雷达2批号 21 28 26 表 6 测试环境3下傅里叶算法关联结果
图共
7 个 表共
6 个






