-
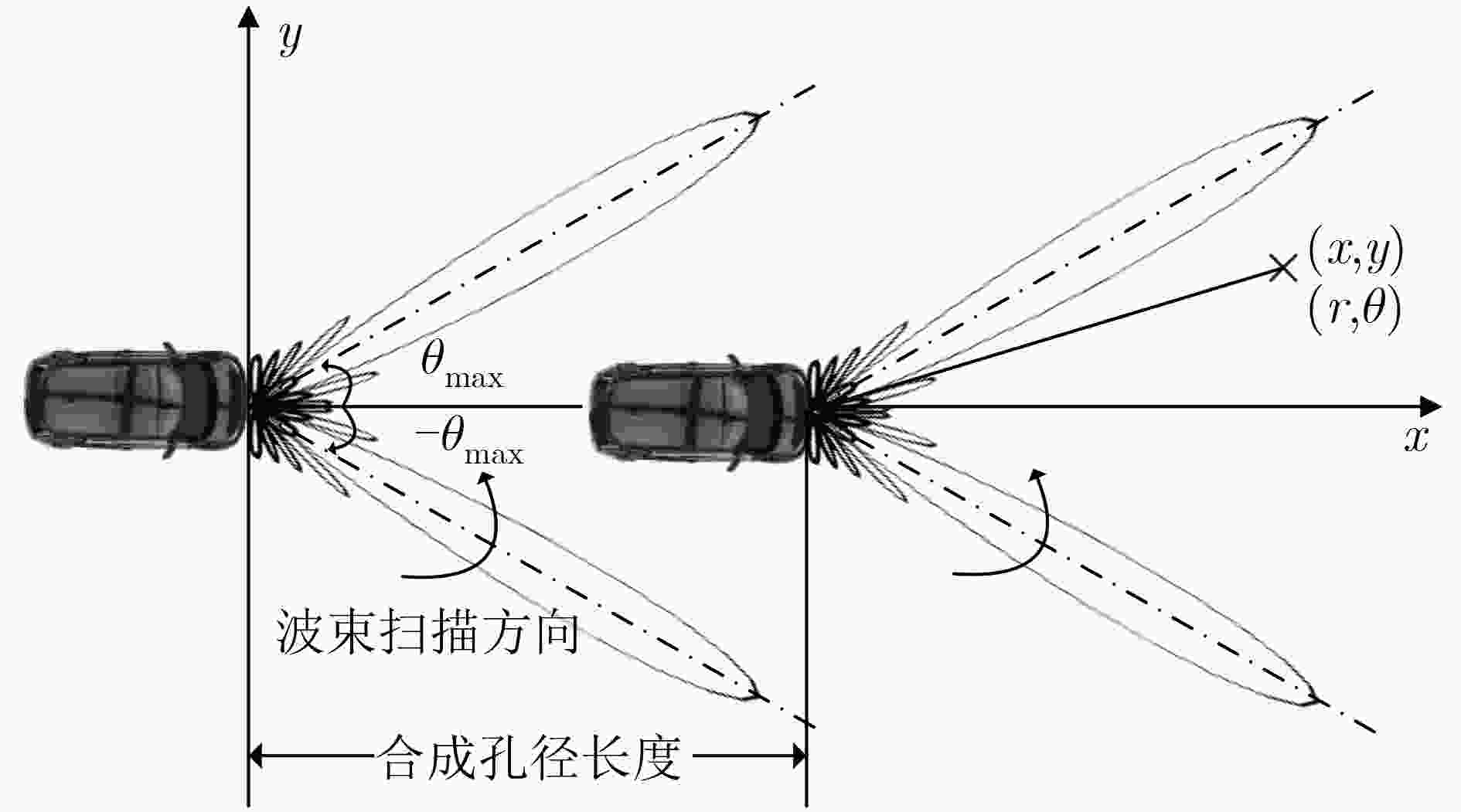
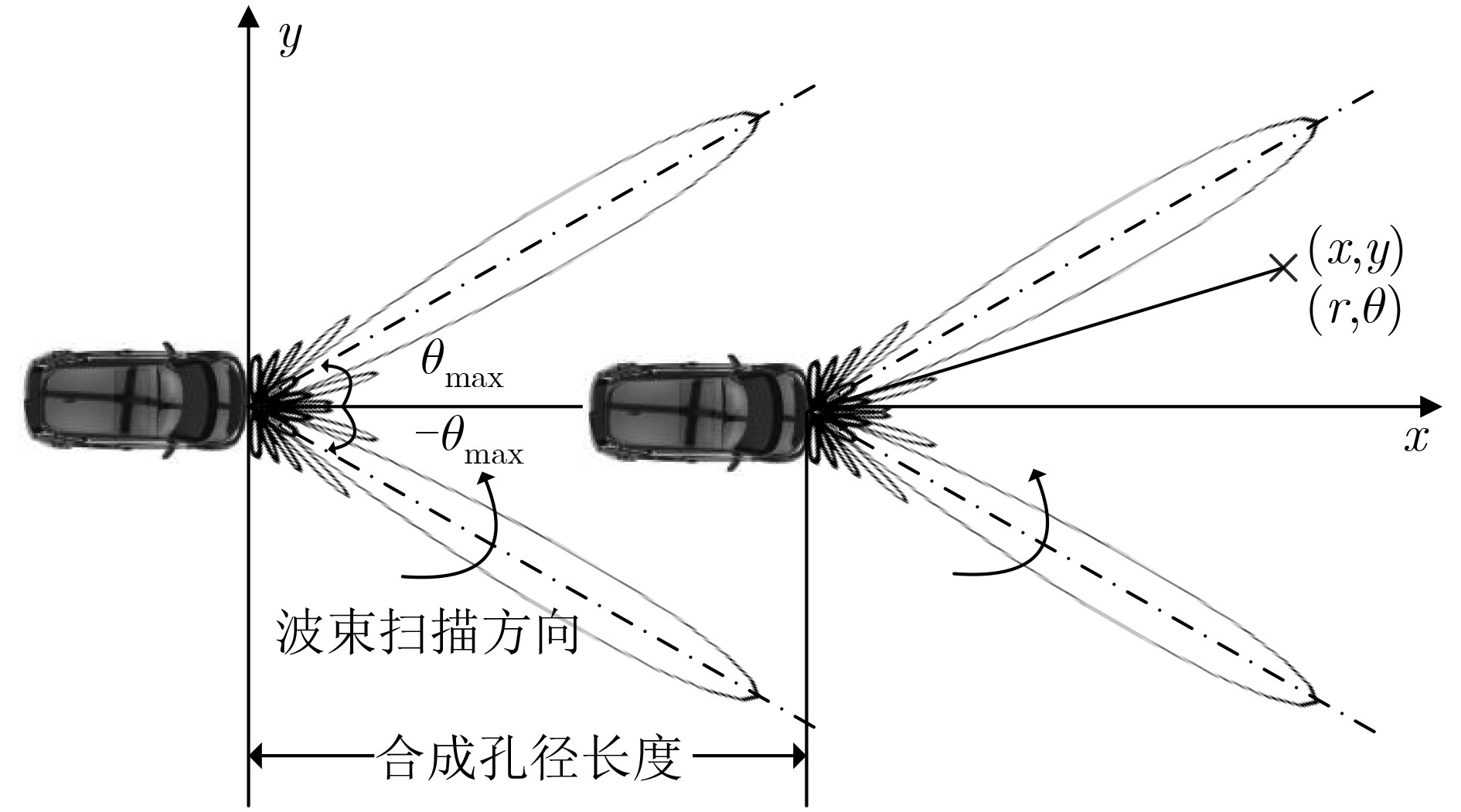
图 1 提升方位分辨率的前视成像雷达工作方式示意图
Figure 1.
-

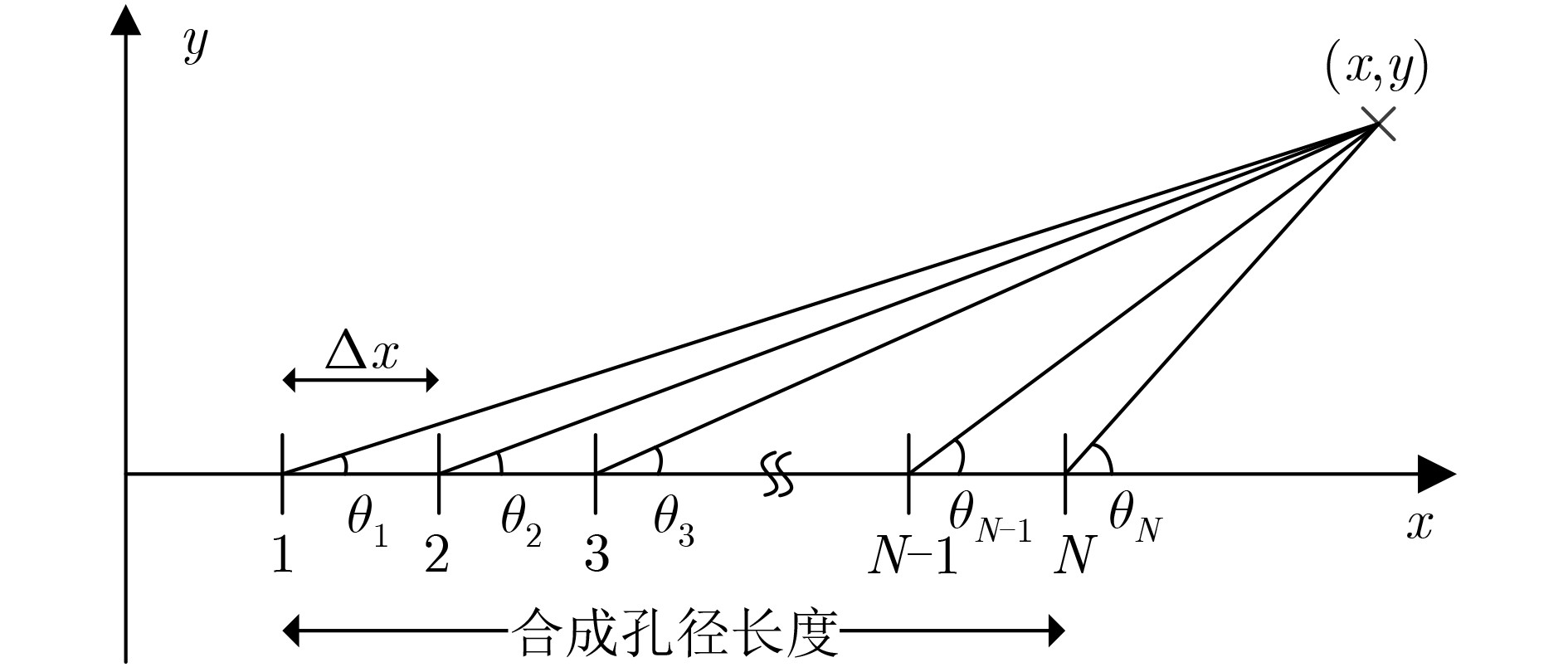
图 2 提升方位分辨率的前视成像雷达工作方式示意图
Figure 2.
-

图 3 成像处理流程图
Figure 3.
-

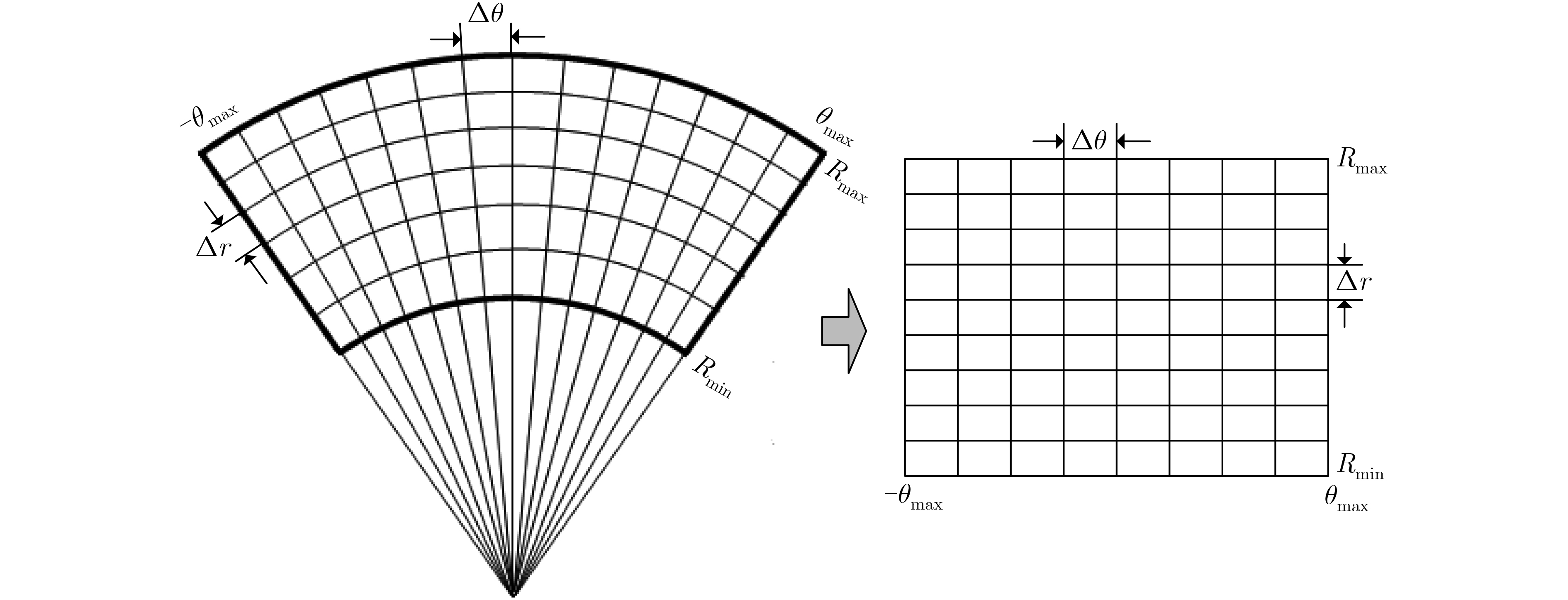
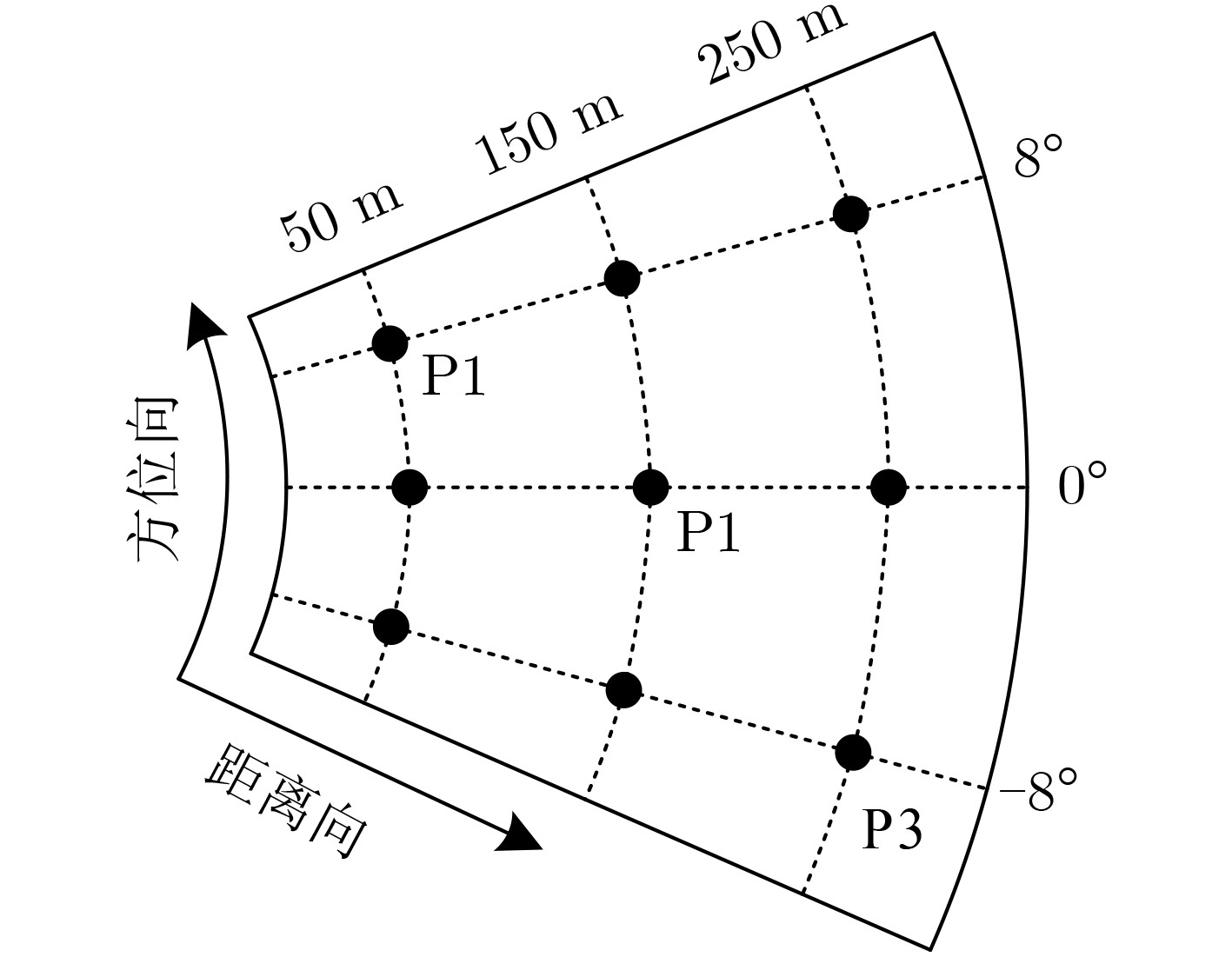
图 4 成像区域打网格处理示意图
Figure 4.
-
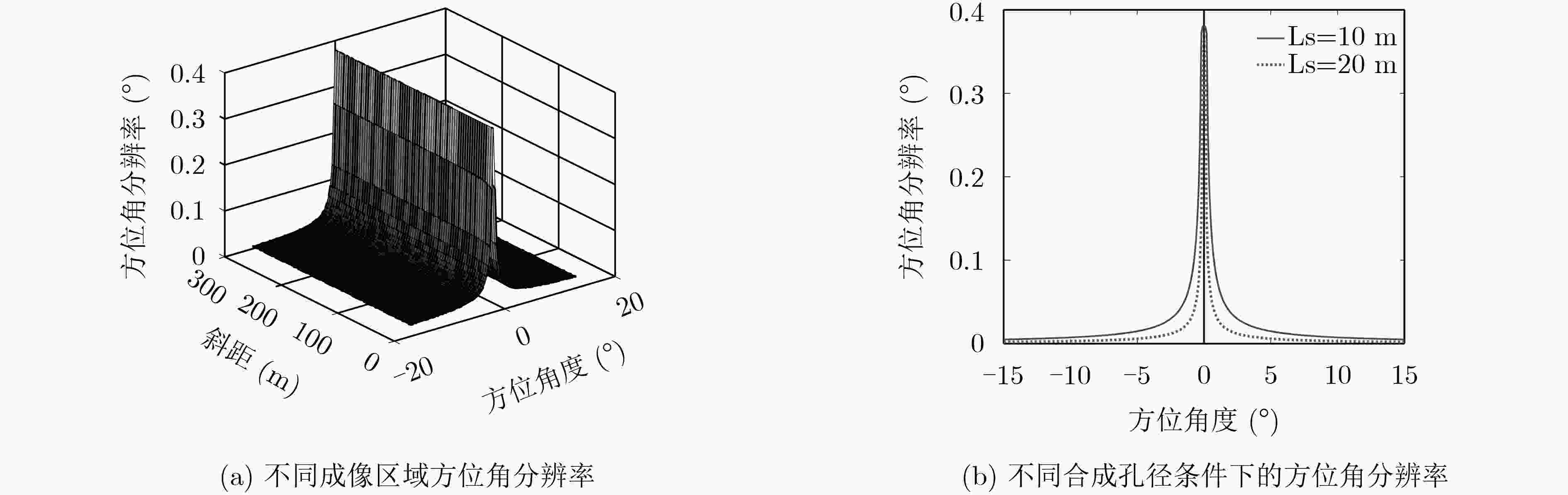
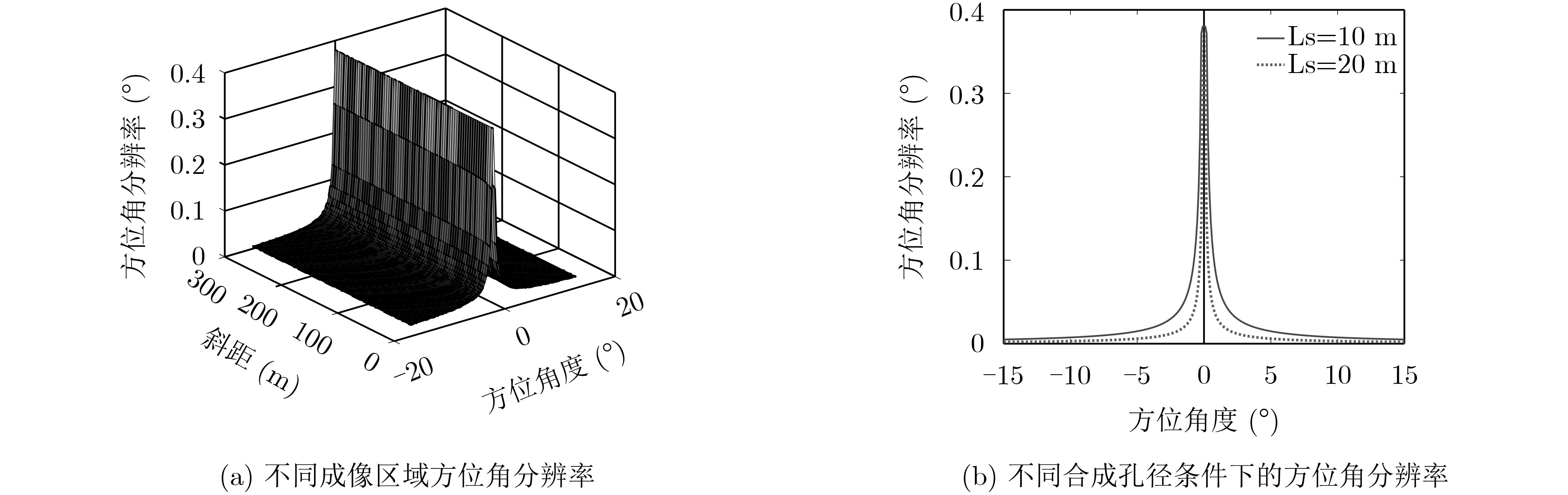
图 5 方位角分辨率仿真结果
Figure 5.
-
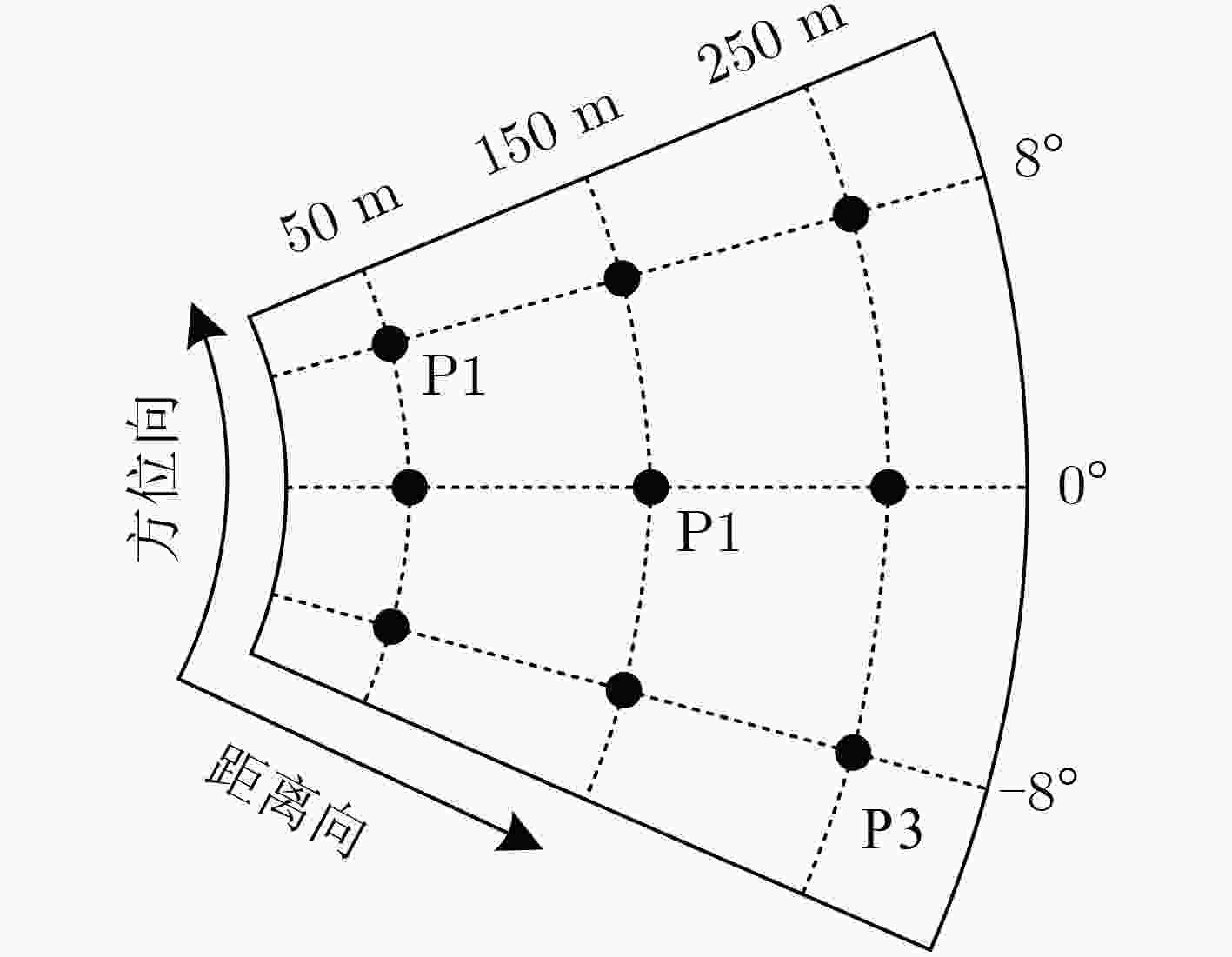
图 6 点阵目标场景设置
Figure 6.
-

图 7 点阵目标场景设置
Figure 7.
-
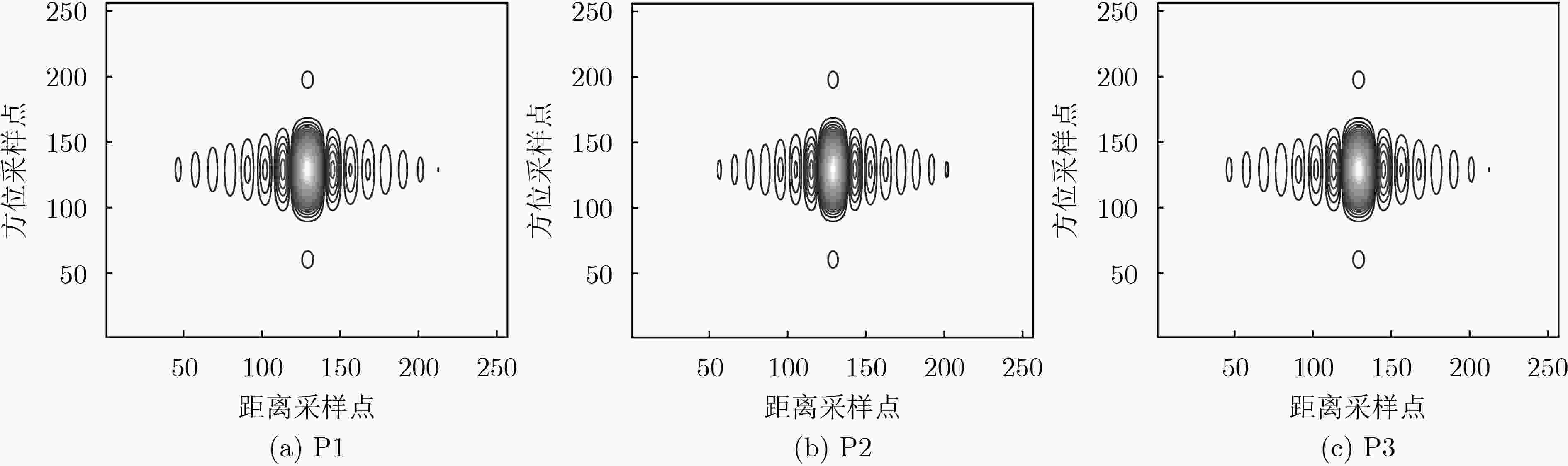
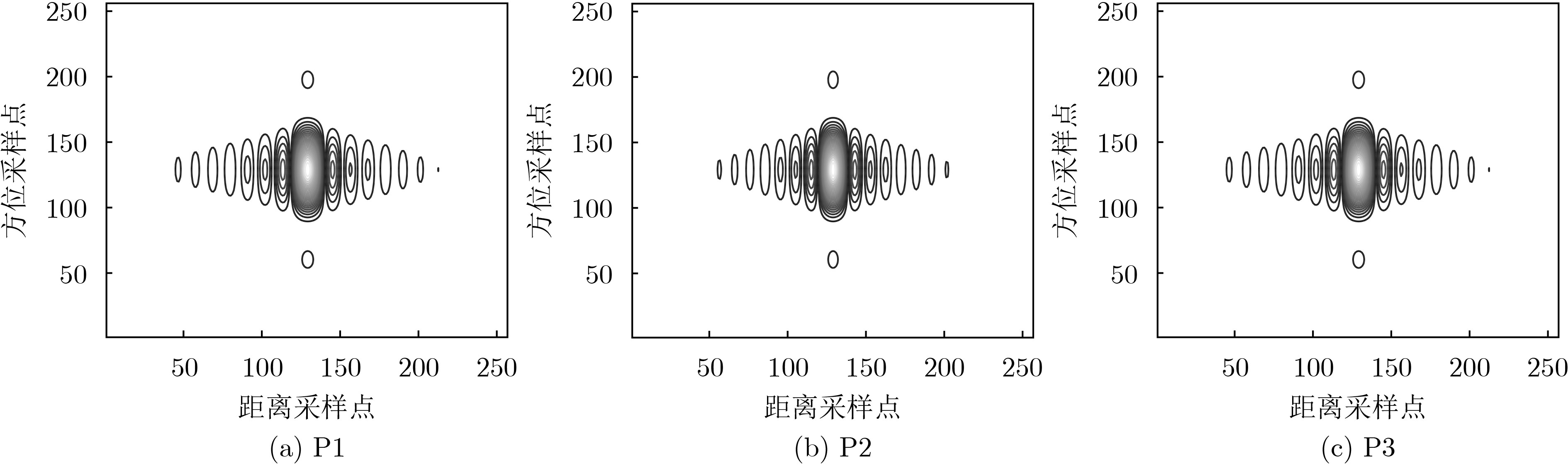
图 8 前视成像雷达实孔径点目标插值处理后的等高线(10 m合成孔径)
Figure 8.
-
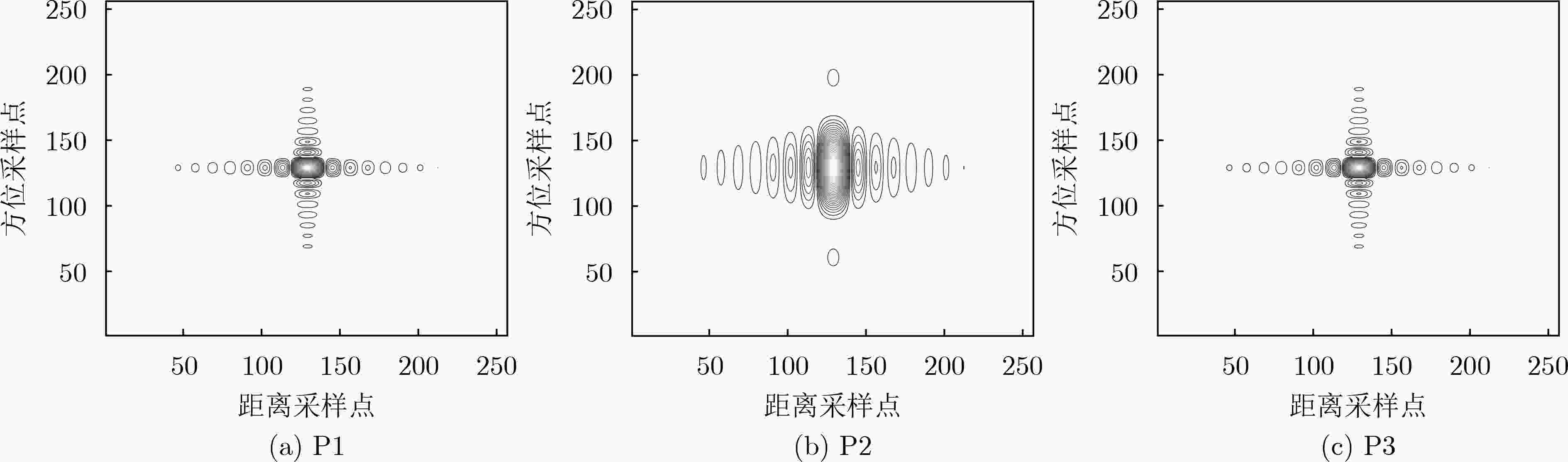
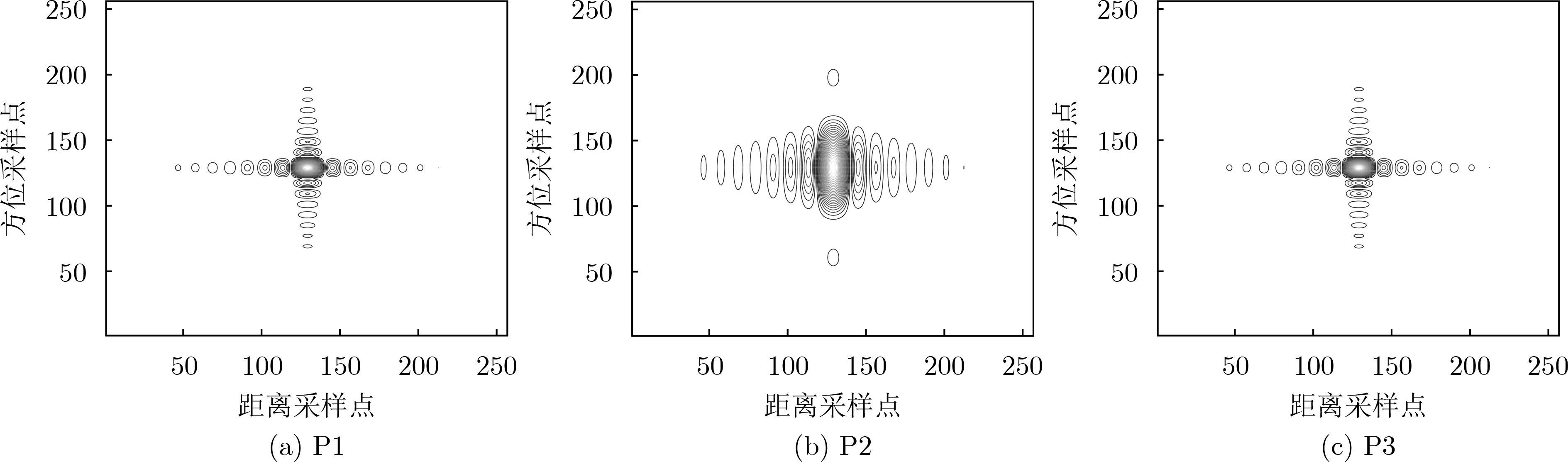
图 9 前视成像雷达高分辨合成孔径点目标插值处理后的等高线(15 m合成孔径)
Figure 9.
-
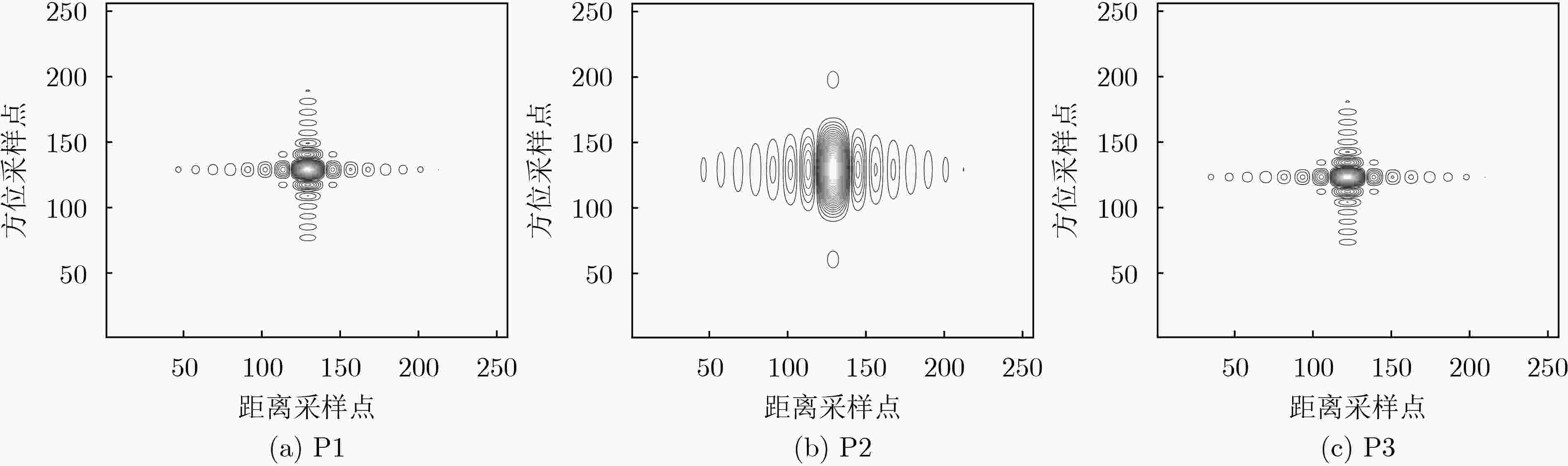
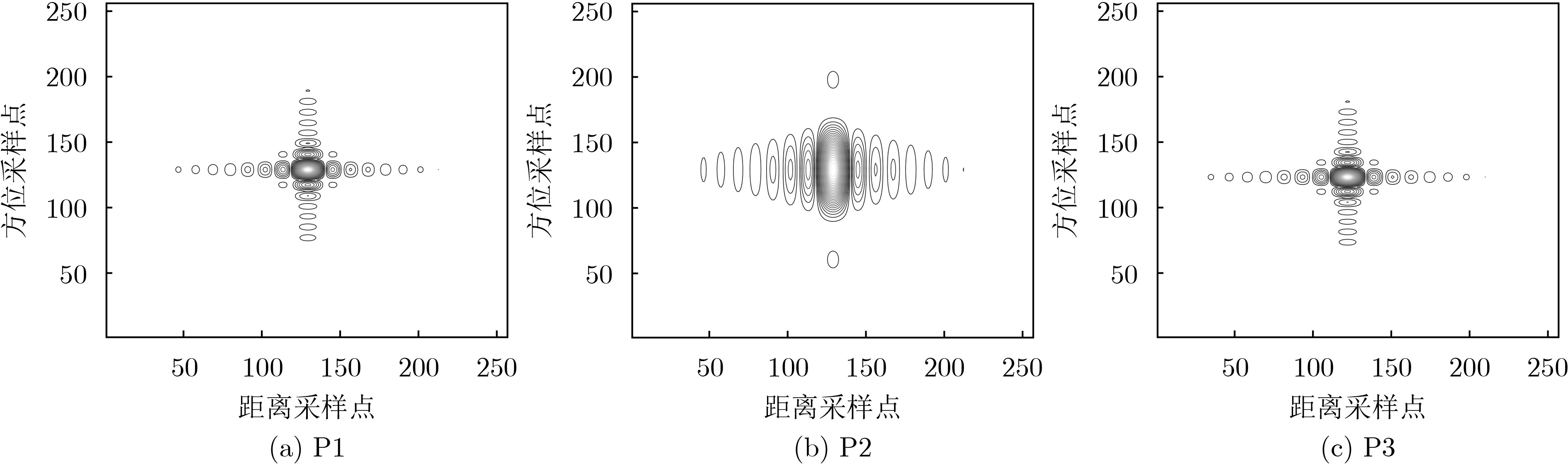
图 10 前视成像雷达高分辨合成孔径点目标插值处理后的等高线(5 m合成孔径)
Figure 10.
-
参数 数值 雷达载频 96 GHz 方位向天线长度 0.3 m 系统PRF 4000 Hz 脉冲宽度 80 μs 信号带宽 1 GHz 去斜接收后雷达信号采样率 150 MHz AD量化位数 12位 方位波束扫描角度范围 ±15° 雷达作用距离 20~300 m 波束跃度 0.3° 合成孔径长度 10 m 汽车速度 15 m/s 表 1 车载前视成像雷达仿真参数
-
模式 目标 距离向 方位向 分辨率(m) PSLR(dB) ISLR(dB) 分辨率(°) PSLR(dB) ISLR(dB) 实孔径图像 P1 0.09 –13.26 –9.98 0.390 –26.40 –22.24 P2 0.09 –13.26 –9.98 0.380 –26.52 –22.47 P3 0.09 –13.26 –9.98 0.390 –26.40 –22.24 实孔径理论值 P1 0.09 –13.26 –9.80 0.380 –26.60 –22.30 P2 0.09 –13.26 –9.80 0.380 –26.60 –22.30 P3 0.09 –13.26 –9.80 0.380 –26.60 –22.30 合成处理图像(10 m合成孔径) P1 0.09 –13.26 –9.98 0.010 –13.18 –9.74 P2 0.09 –13.26 –9.98 0.390 –26.52 –22.29 P3 0.09 –13.26 –9.98 0.010 –13.18 –9.74 合成处理理论值(10 m合成孔径) P1 0.09 –13.26 –9.80 0.010 –13.26 –9.80 P2 0.09 –13.26 –9.80 0.390 –26.60 –22.30 P3 0.09 –13.26 –9.80 0.010 –13.26 –9.80 合成处理图像(15 m合成孔径) P1 0.09 –13.06 –9.72 0.007 –13.08 –9.44 P2 0.09 –13.26 –9.98 0.390 –26.52 –22.29 P3 0.09 –13.06 –9.72 0.007 –13.07 –9.40 合成处理理论值(15 m合成孔径) P1 0.09 –13.26 –9.80 0.007 –13.26 –9.80 P2 0.09 –13.26 –9.80 0.390 –26.60 –22.30 P3 0.09 –13.26 –9.80 0.007 –13.26 –9.80 表 2 点目标聚焦性能指标
图共
10 个 表共
2 个