-

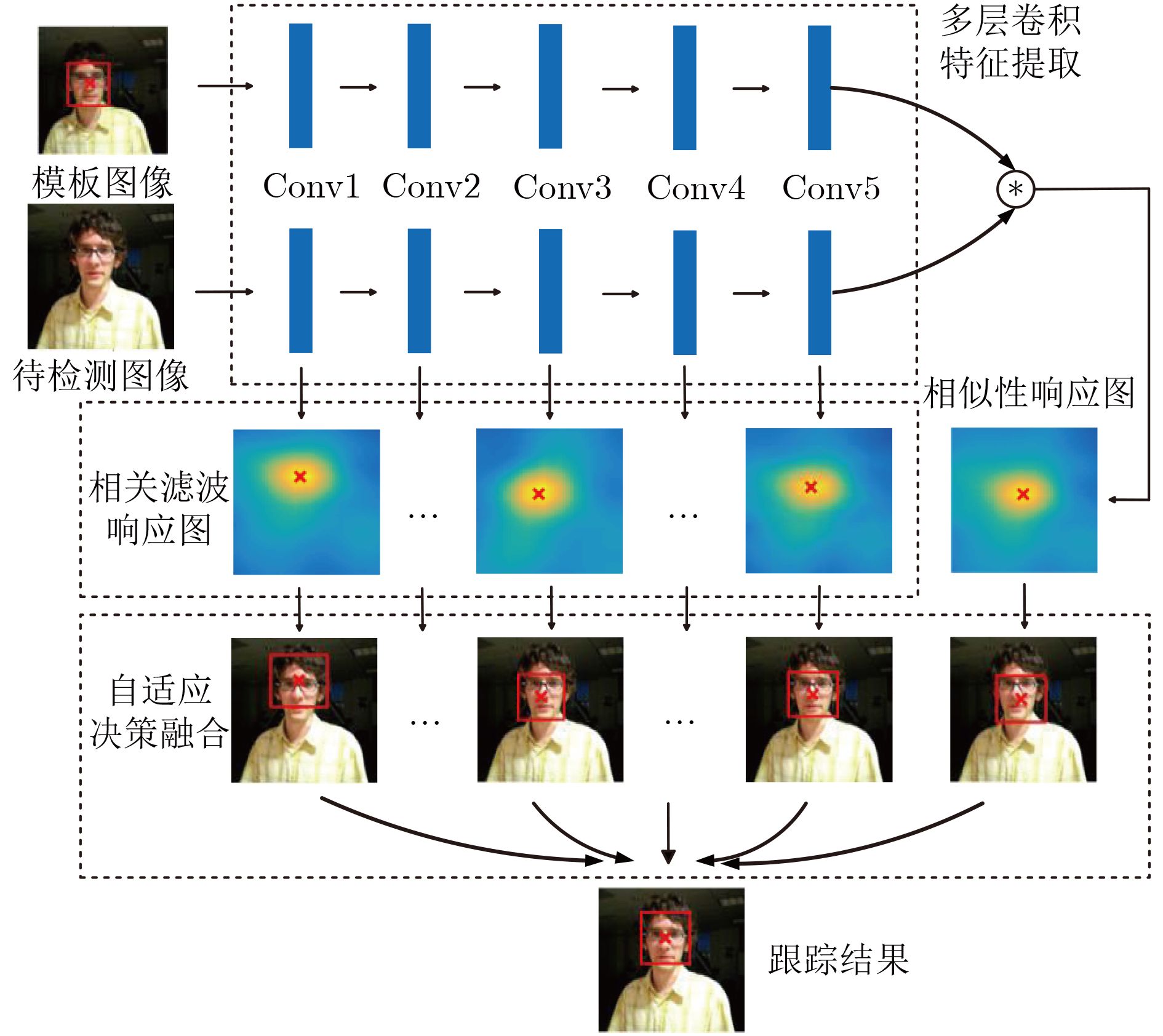
图 1 ASFTT算法框图
Figure 1.
-

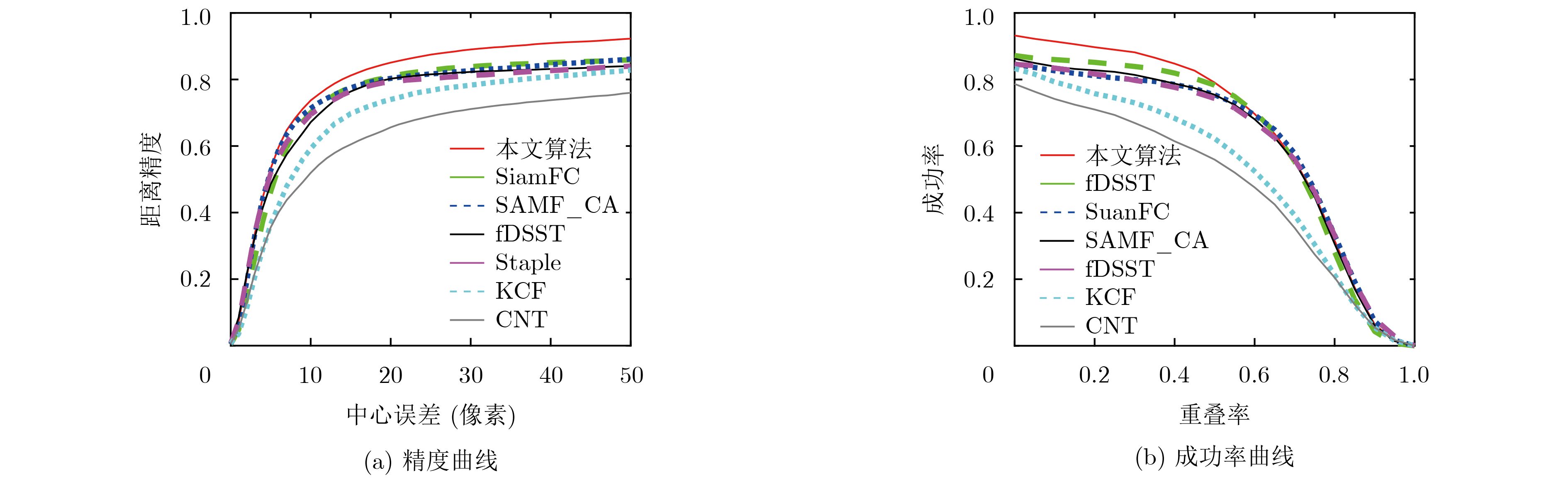
图 2 算法整体的精度曲线和成功率曲线图
Figure 2.
-
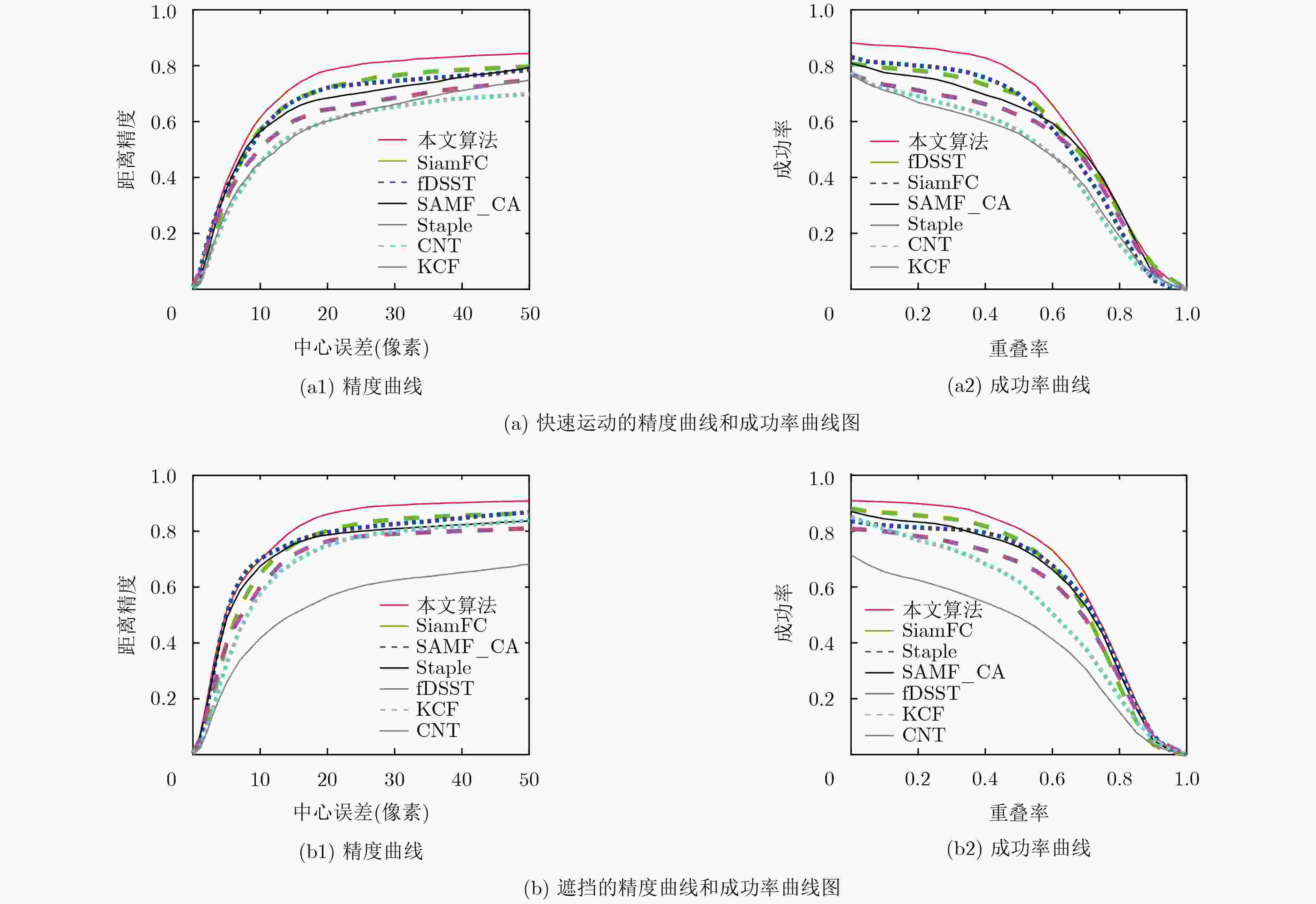
图 3 算法各属性的精度曲线和成功率曲线图
Figure 3.
-
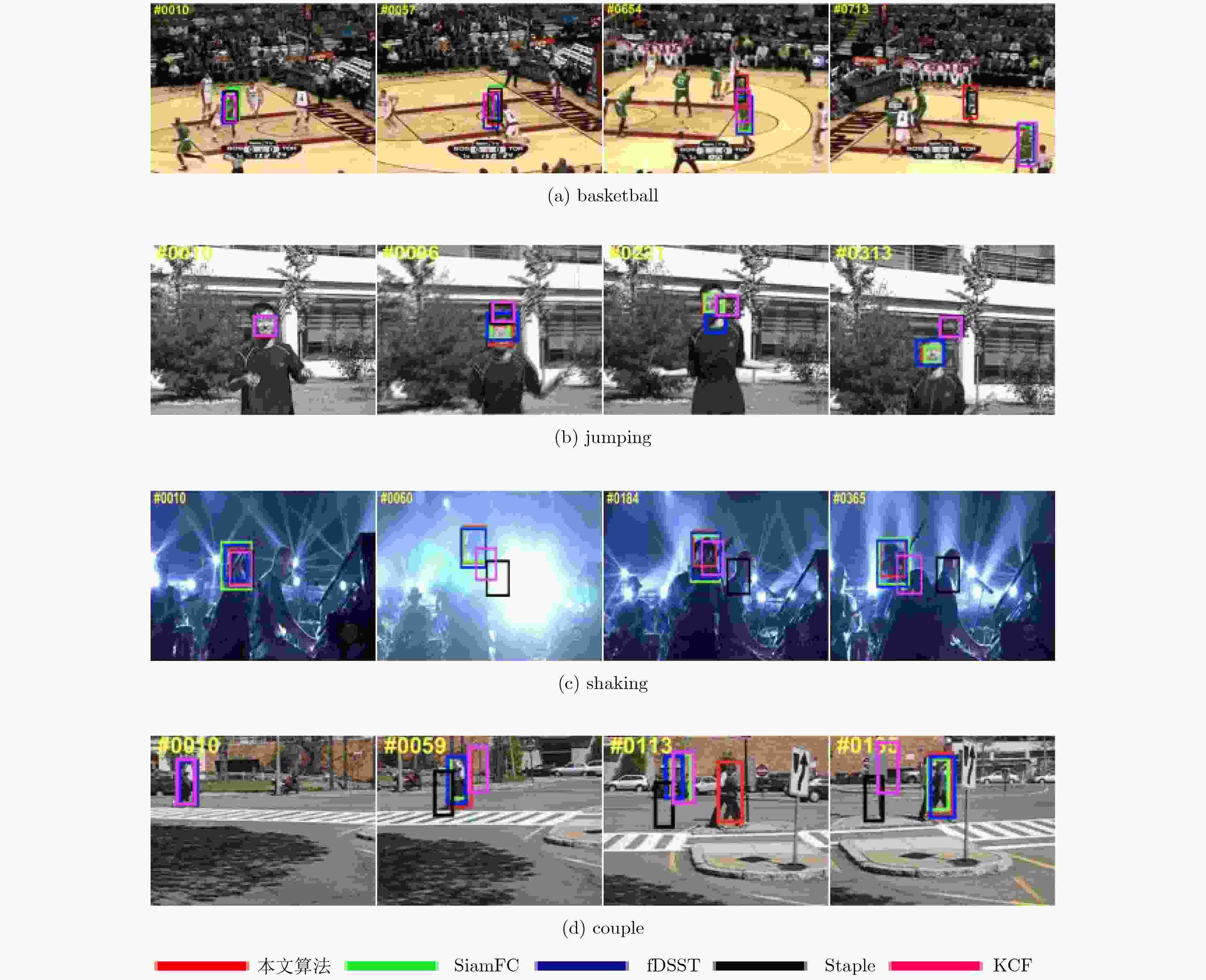
图 4 跟踪效果对比图
Figure 4.
-
输入:视频序列第1帧的目标位置;初始各决策权重$w_1^1,w_1^2, ·\!·\!· ,w_1^m$; $R_1^m = 0$,$l_1^m = 0$。 输出:每帧图像的目标位置$({a_t},{b_t})$。 (1) //权重初始化。使用式(4)计算$k$个跟踪器的初始权重; (2) for t=2 to T(T是视频的总帧数): (3) //提取网络多层特征。提取网络中待检测图像$k$层的特征$x_t^k$和模板分支最后一层特征${u'_1}$; (4) //响应值计算。使用式(6)和式(8)计算$k$个相关滤波响应值$R_t^k$和相似性响应值${R'_t}$; (5) //自适应响应决策融合。计算目标位置首先使用式(7)和式(9)计算步骤(4)中每个决策者预测的目标位置$(a_t^m,b_t^m)$;通过式(10)计算最终的 目标位置$({a_t},{b_t})$; (6) //更新权重值,用于下一帧检测。首先通过式(11)和式(12)计算各决策者的损失$L_t^m$和当前代价函数$p_t^m$;其次使用式(13)和式(14)更新稳 定性模型并计算每个决策者的稳定性度量值$r_t^m$;使用式(15b)和式(15a)计算每个决策者当前代价函数$p_t^m$的$\alpha _t^m$比例值和每个决策者 的累积代价函数$S_t^m$;并使用式(16)更新每个决策者所对应的权重$w_{t + 1}^m$;最后通过式(5)更新$k$个跟踪器的权重; (7) end for; 表 1 基于多层卷积特征的自适应决策融合目标跟踪算法
-
序列 帧数 影响因素 basketball 725 形变、遮挡、光照变化、背景杂波等 jumping 313 运动模糊、快速运动 shaking 365 光照变化、背景杂波、尺度变化等 couple 140 平面外旋转、尺度变化、形变等 表 2 测试视频序列包含的影响因素
图共
4 个 表共
2 个