-
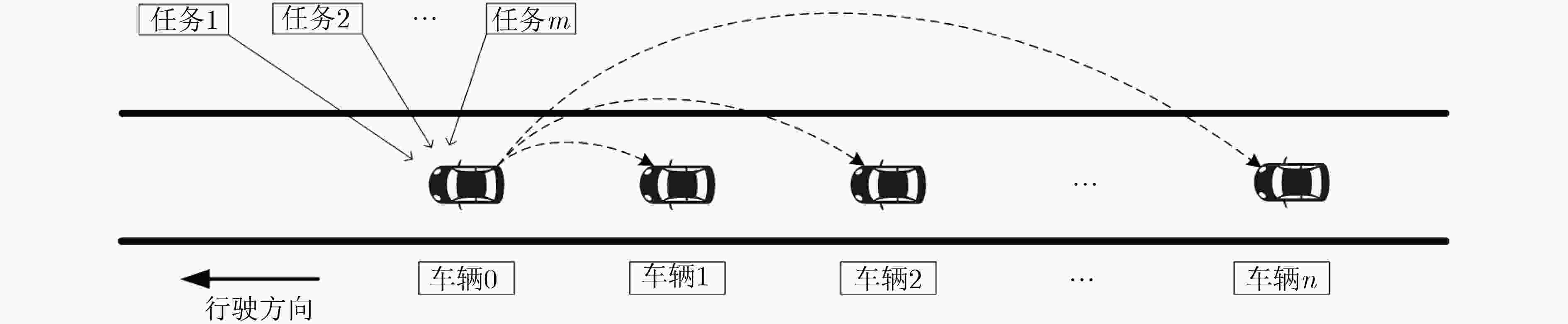
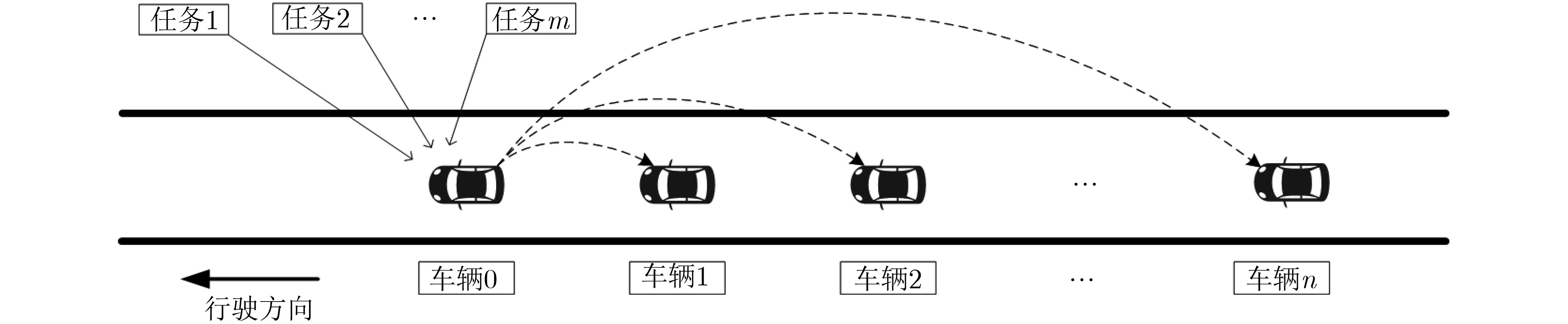
图 1 自动协同驾驶的多车编队场景示意图
Figure 1.
-
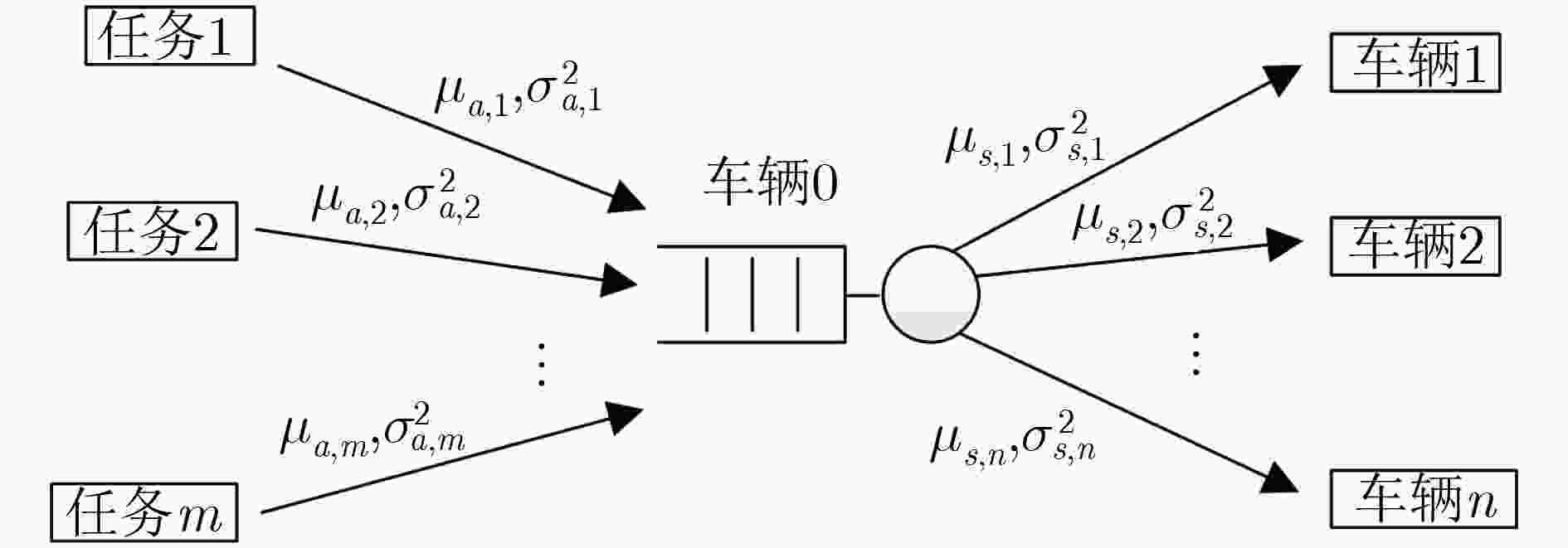
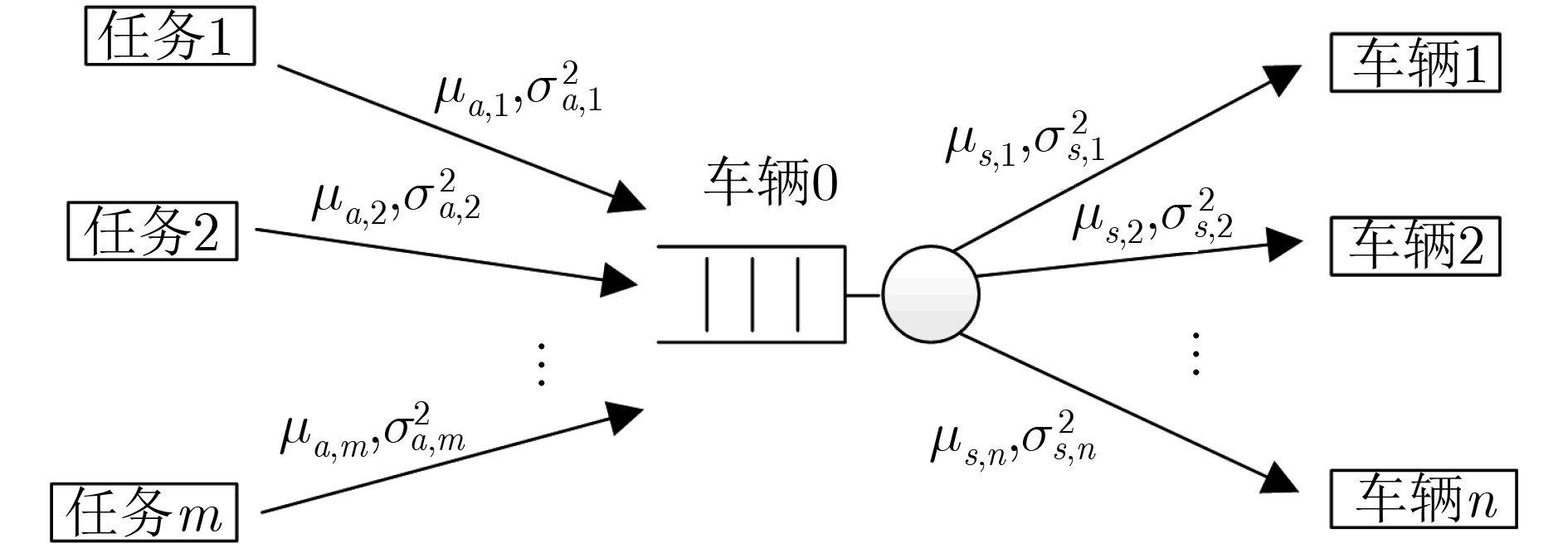
图 2 车辆编队网络拓扑建模
Figure 2.
-
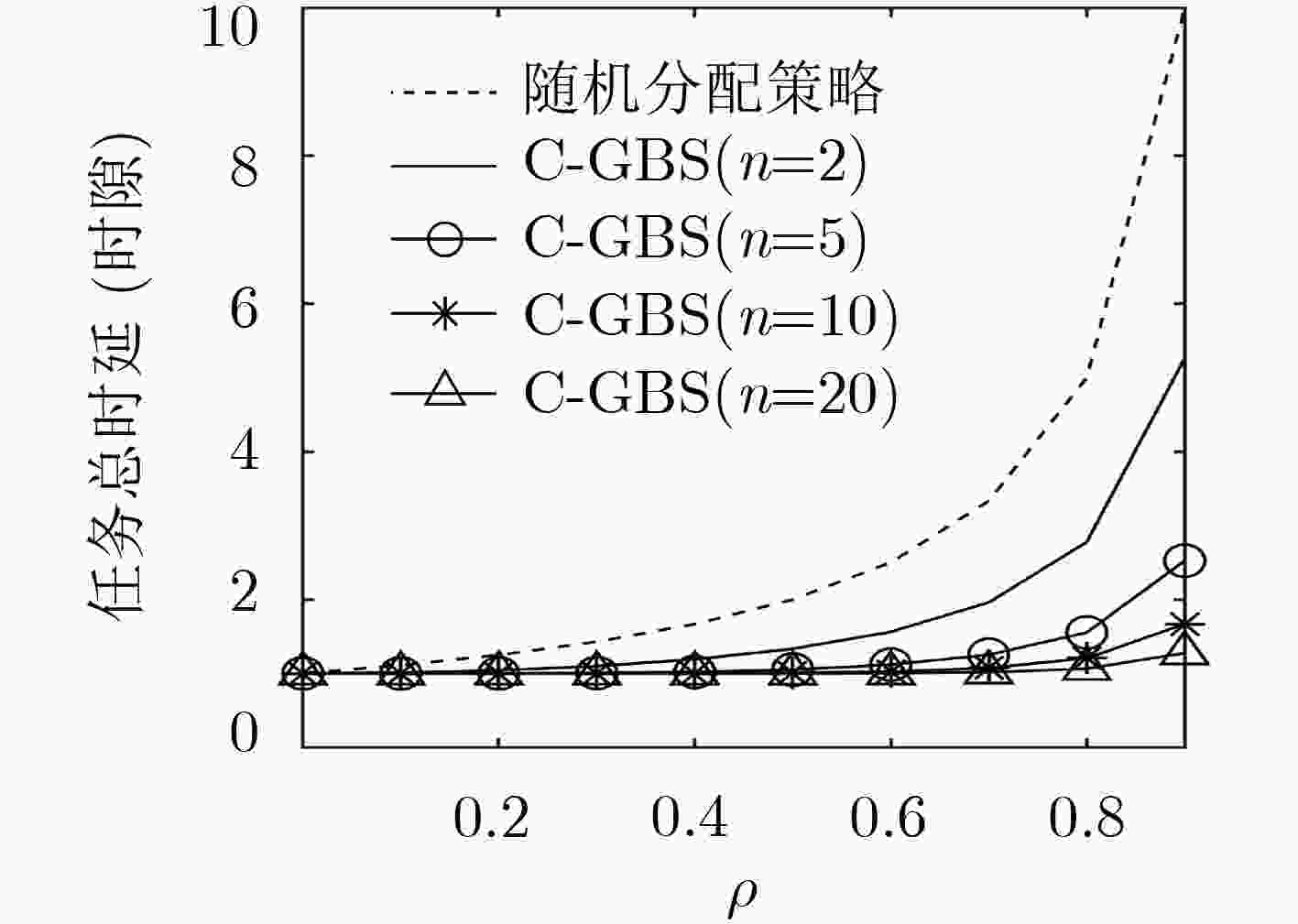
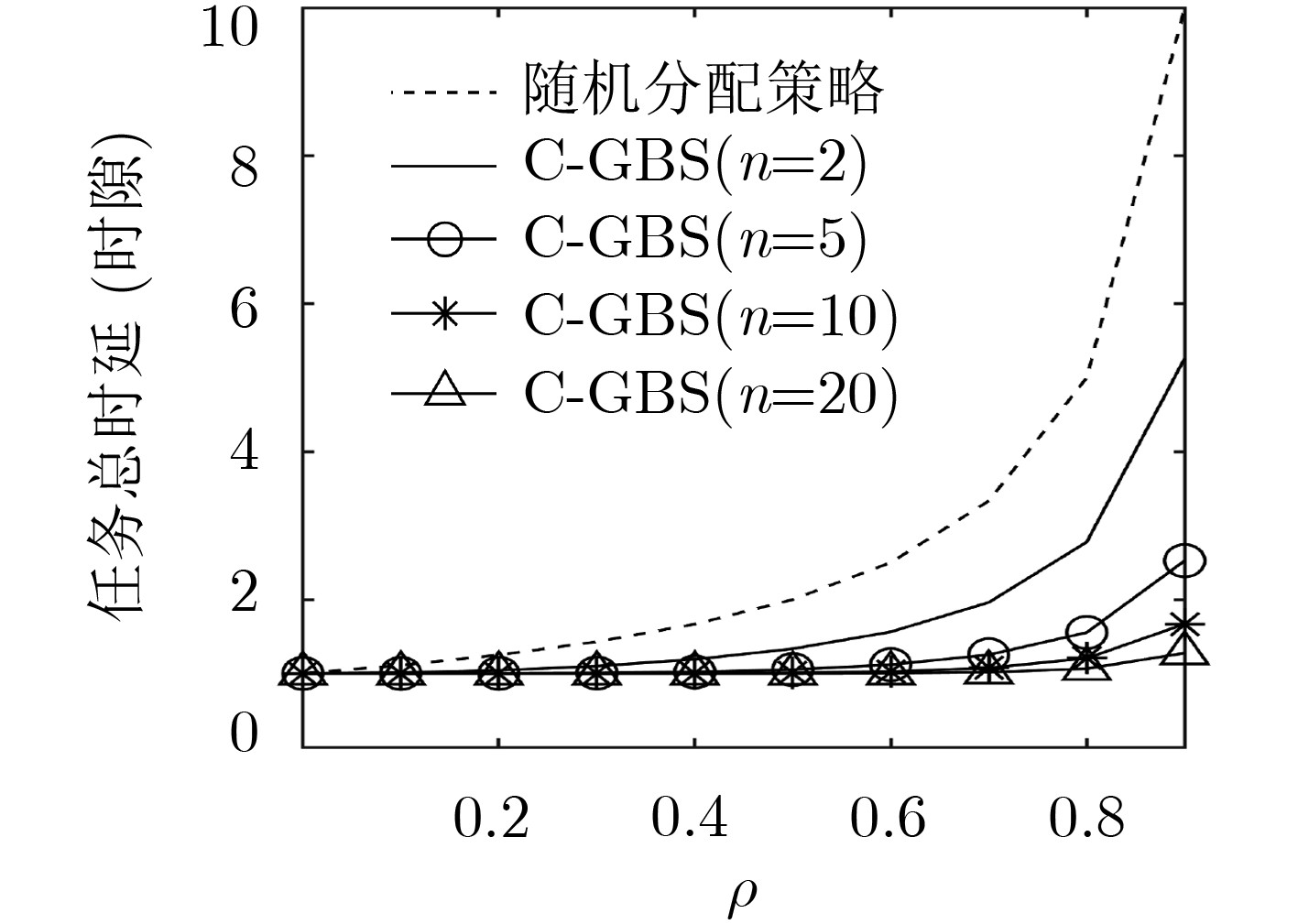
图 3 不同分配策略的任务总时延
Figure 3.
-
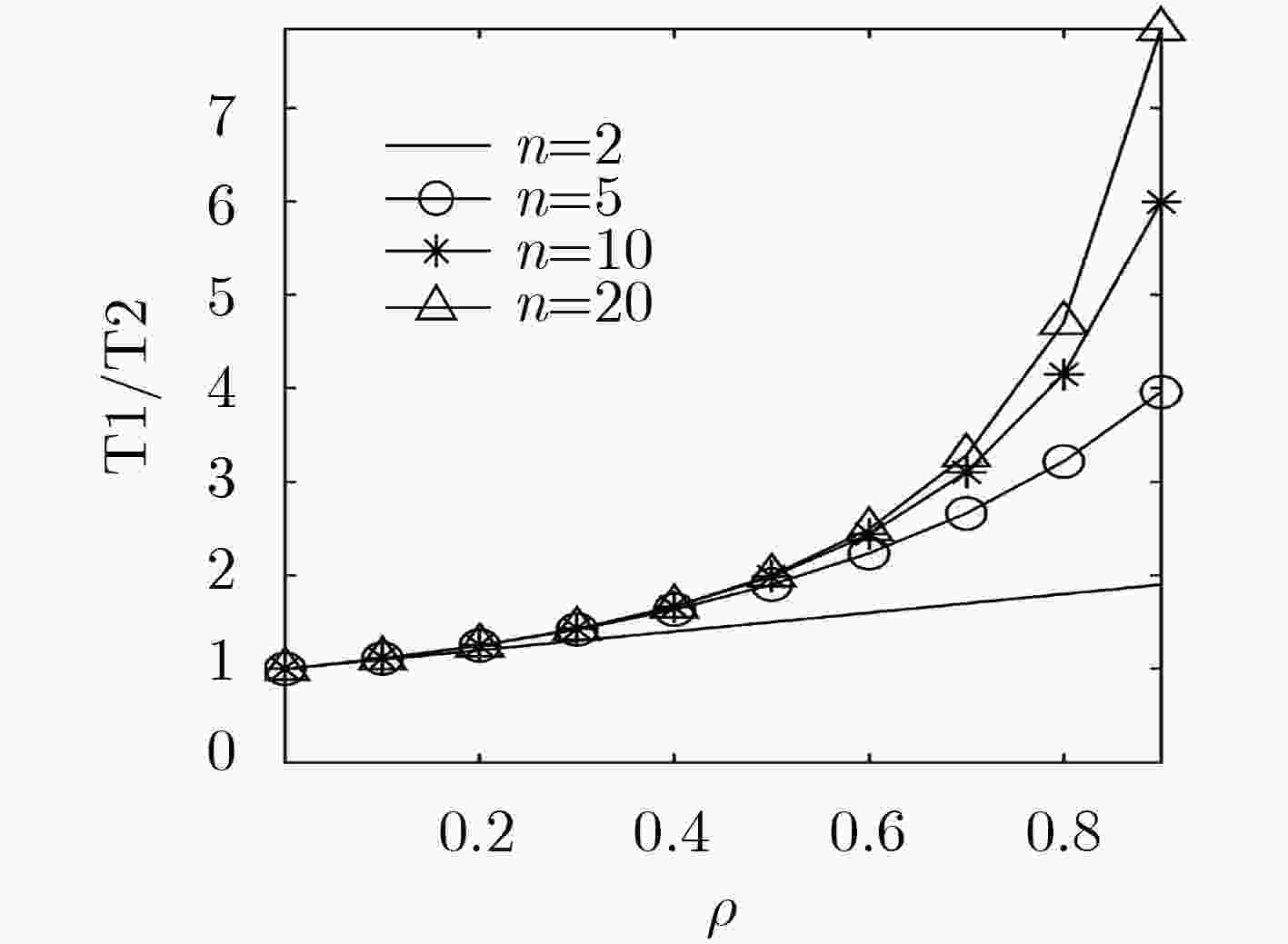
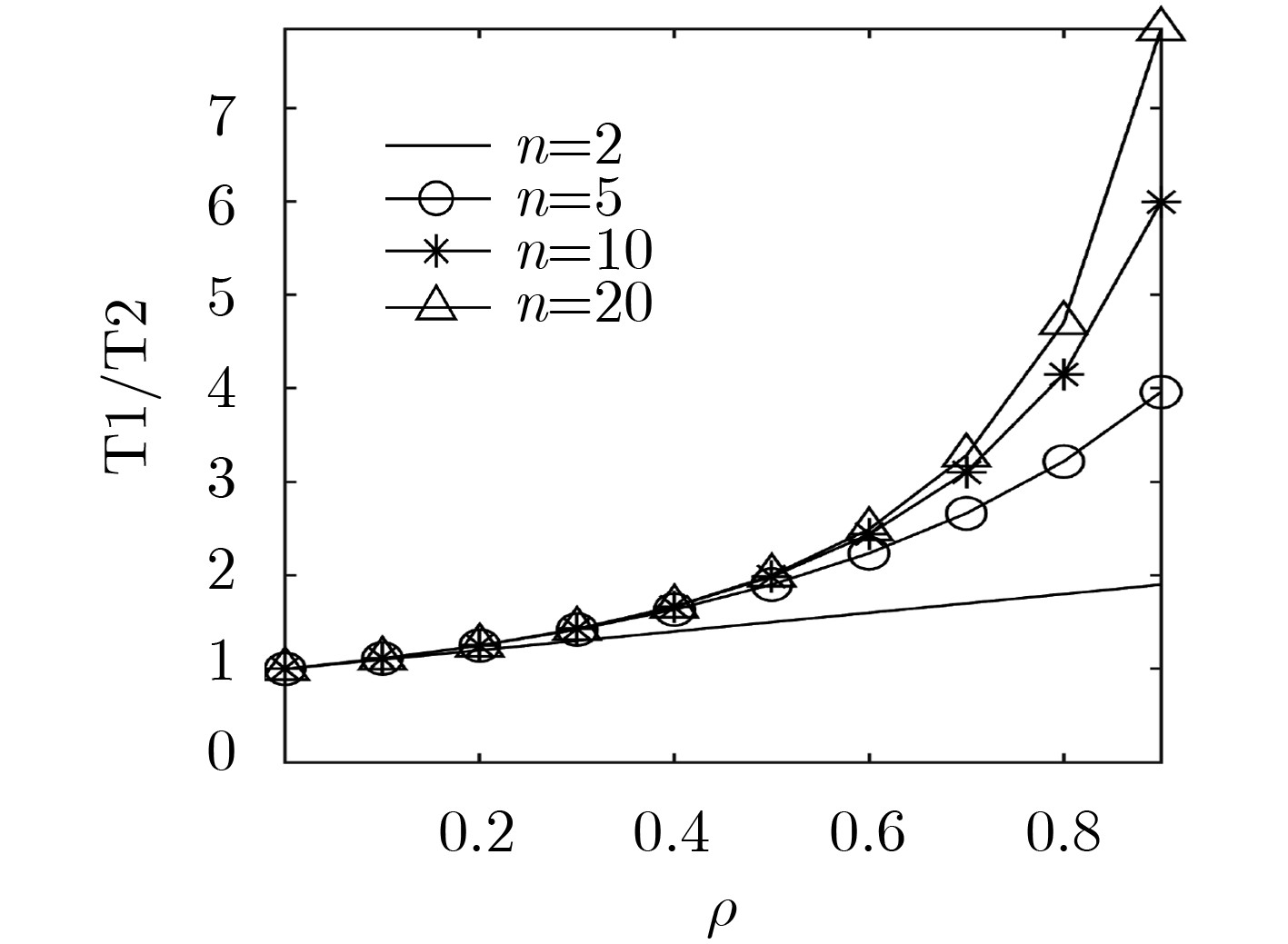
图 4 不同分配策略的处理时延比值关系图
Figure 4.
-

图 5 不同分配策略的系统资源利用率
Figure 5.
-
输入:车辆集$V$,任务集T 输出:结果集S (1) 基于对车辆状态的分类,初始化候选车辆集${V_1}$和结果集S; (2) 遍历任务集T,选取T 中时延门限${T_i}$最小的任务${t_i}$,对其进行
分配;(3) 选择候选车辆集${V_1}$中的第1辆车${v_{k,1}}$,根据${v_{k,1}}$的处理速率和
任务${t_i}$的sizei估计${v_{k,1}}$处理任务${t_i}$所需的时间${\tau _{i,1}}$,并令
$ {\tau _i} = {\tau _{i,1}},\kappa = 1$;(4) 遍历候选车辆集${V_1}$,依次计算${V_1}$中每辆车vk处理任务${t_i}$所需
时间${\tau _{i,k}}$,若${\tau _{i,k}}<{\tau _{i}}$,则令$ {\tau _i} = {\tau _{i,k}},\kappa = k$;(5) 遍历${V_1}$完成后,将任务${t_i}$分配给${V_1}$中的第$ \kappa $辆车处理; (6) 更新车辆vk的状态,更新候选车辆集${V_1}$,更新任务集T并更
新结果集S记录每项任务的处理情况;(7) 返回第(2)步,继续执行,直到任务全部完成。 表 1 C-GBS算法
图共
5 个 表共
1 个