-

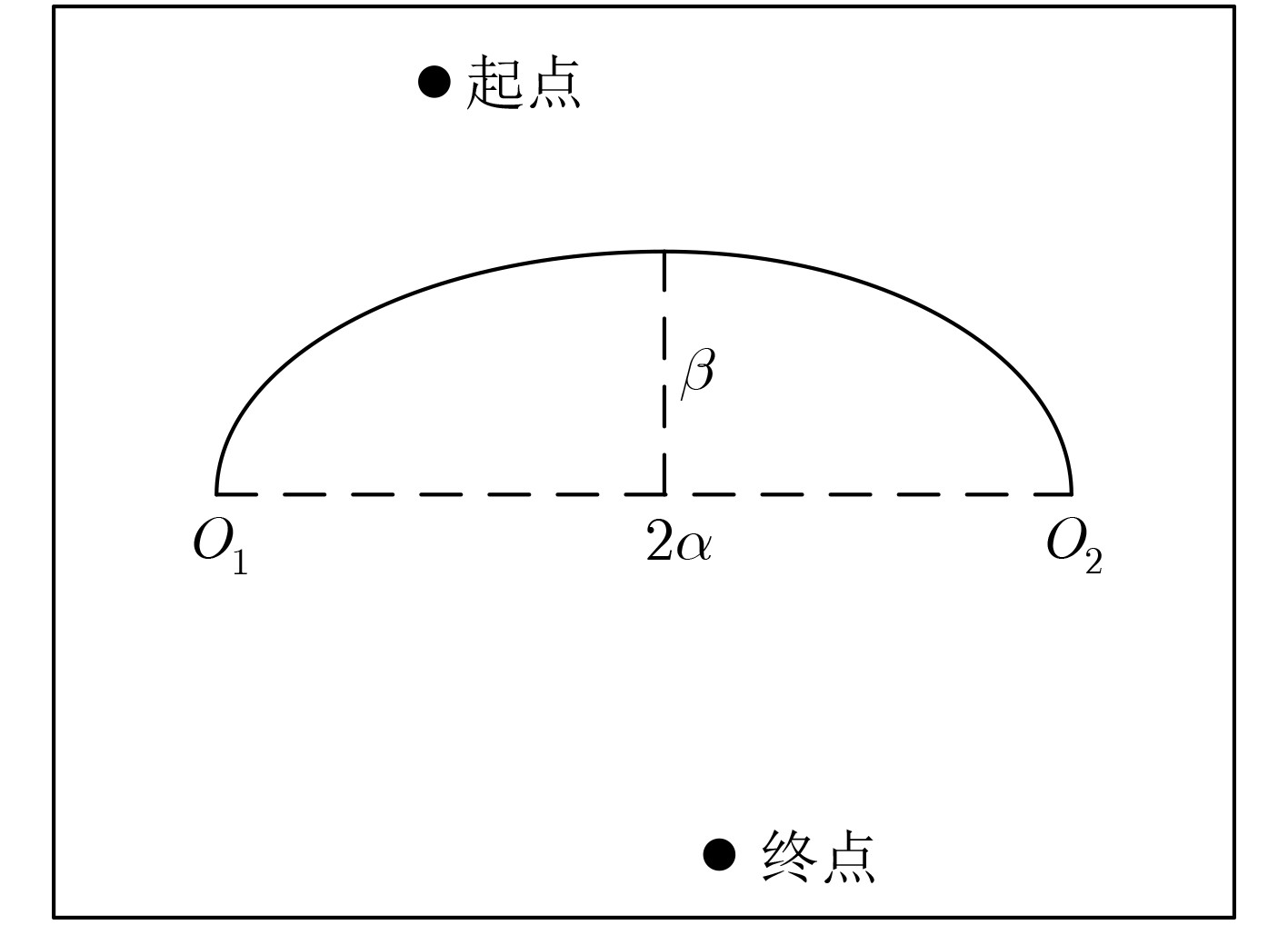
图 1 障碍物建模图
Figure 1.
-

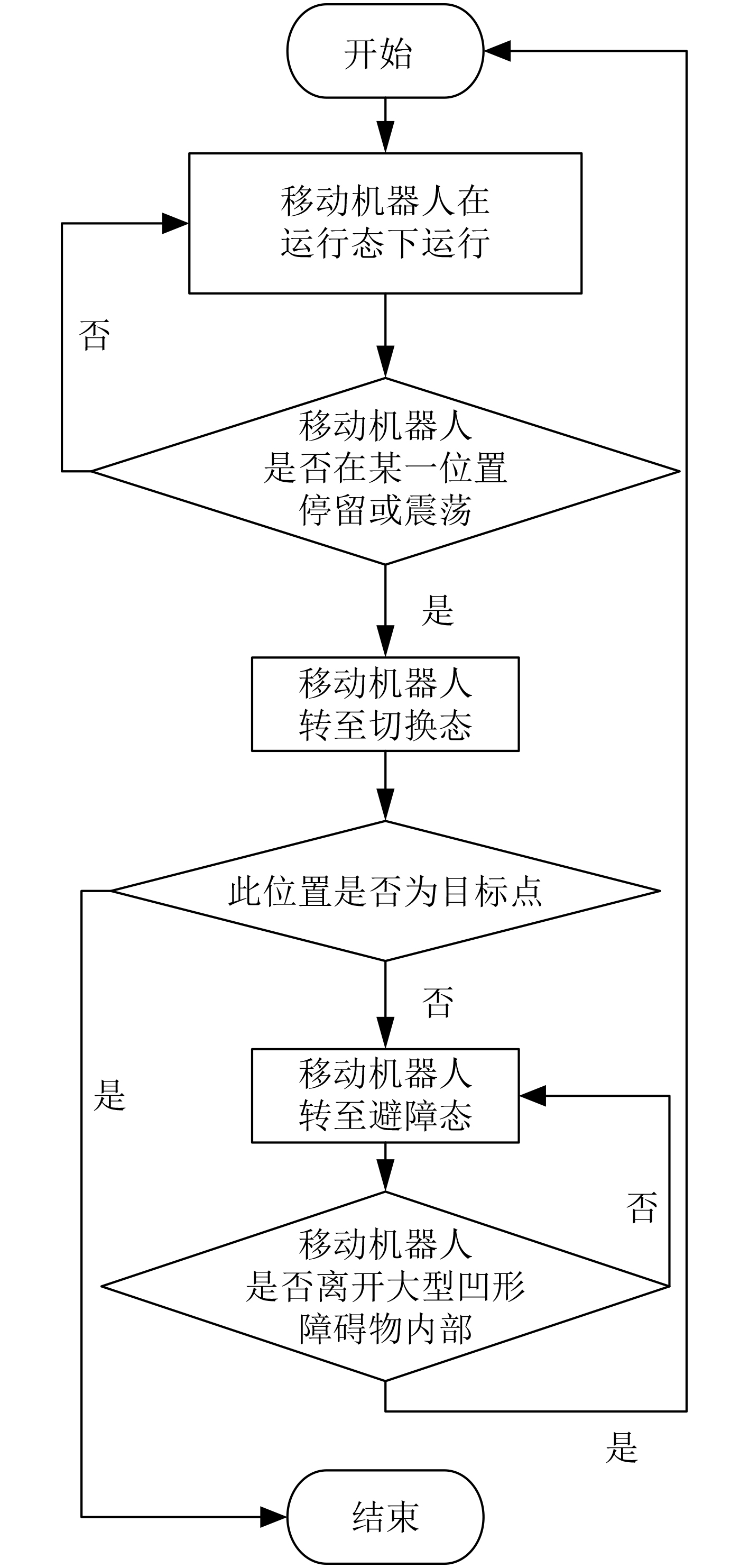
图 2 组合算法流程图
Figure 2.
-
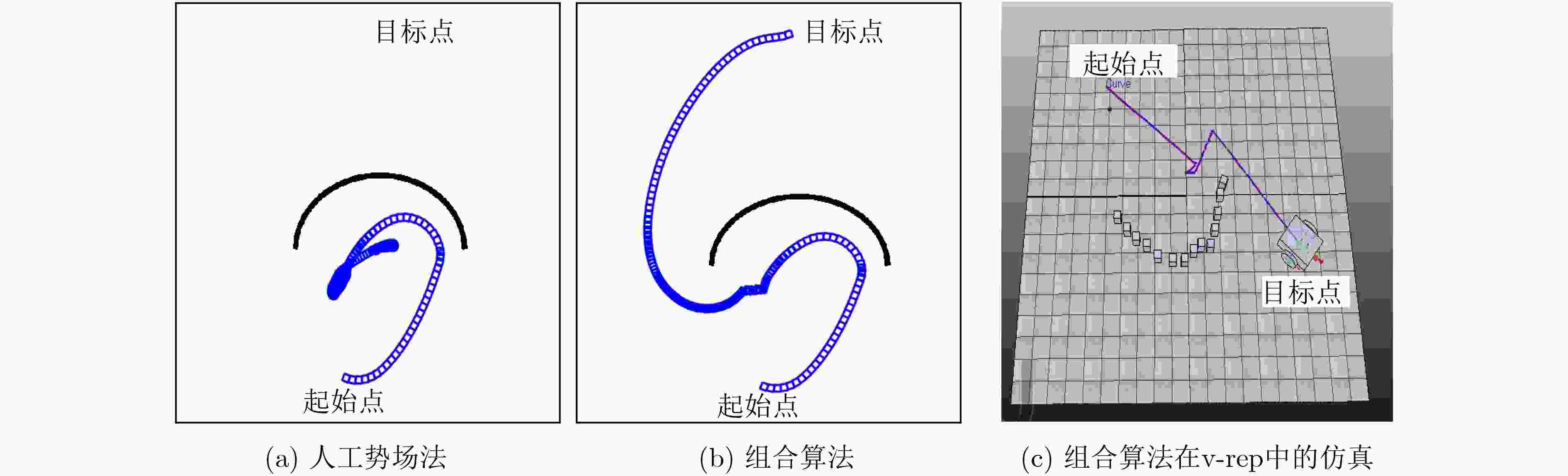
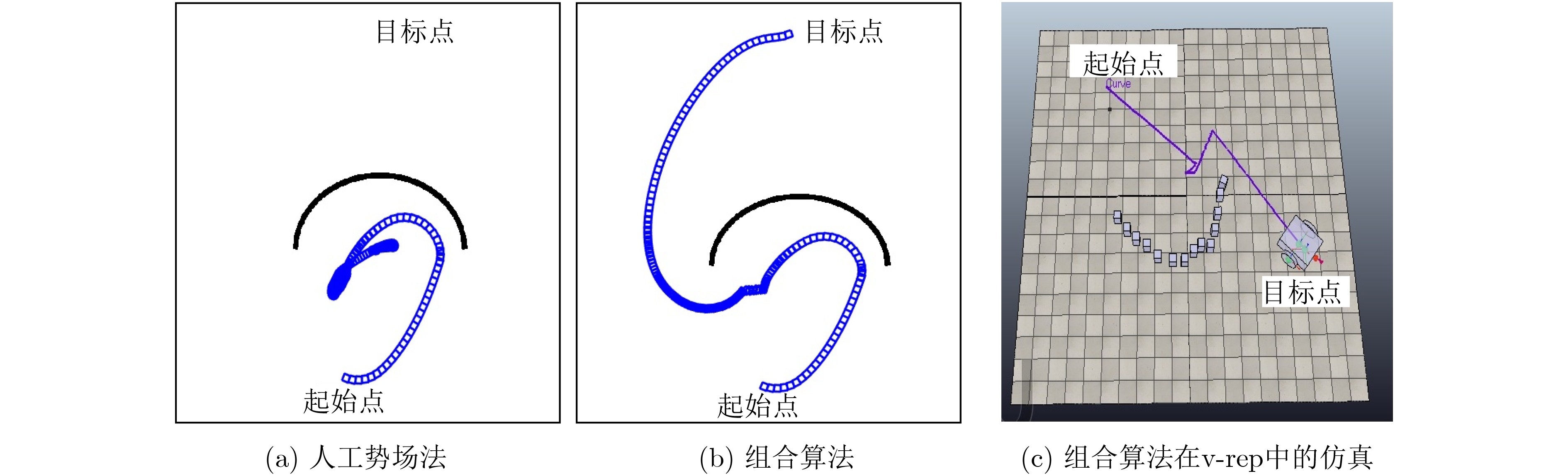
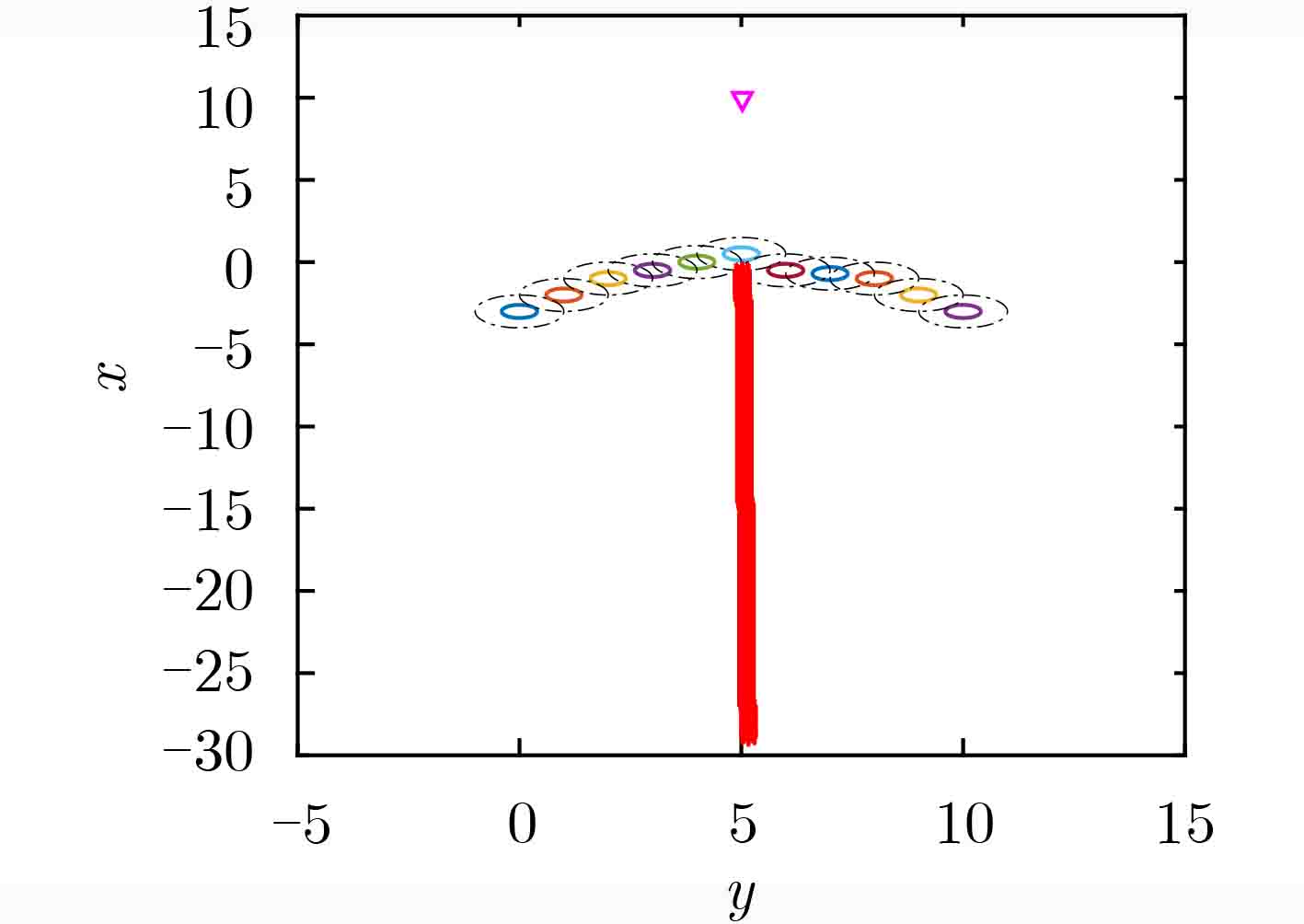
图 3 针对大型凹形障碍物仿真结果
Figure 3.
-

图 4 针对大型凹形障碍物的A*算法的仿真结果
Figure 4.
-

图 5 针对大型凹形障碍物的改进人工势场法算法的仿真结果
Figure 5.
-
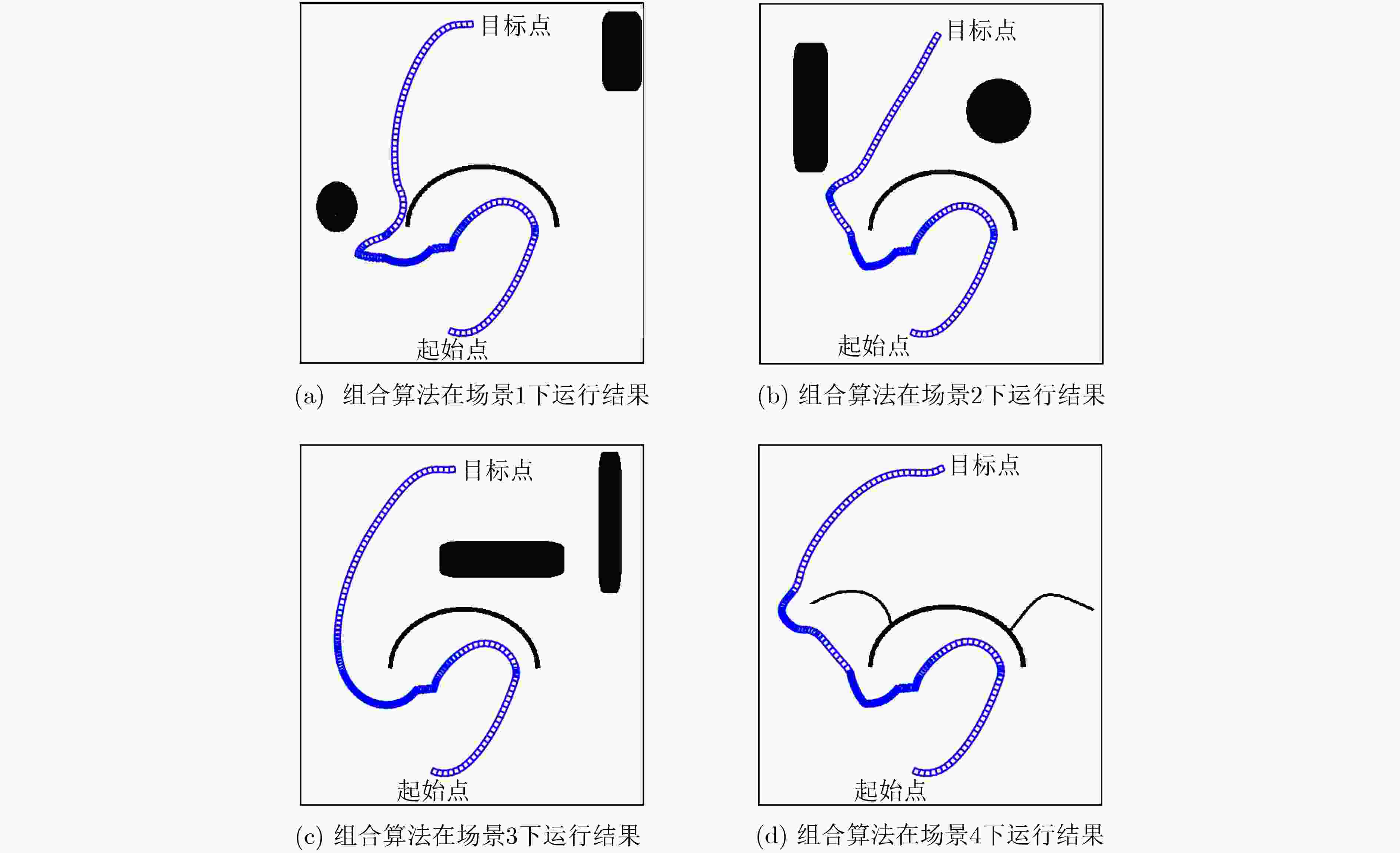
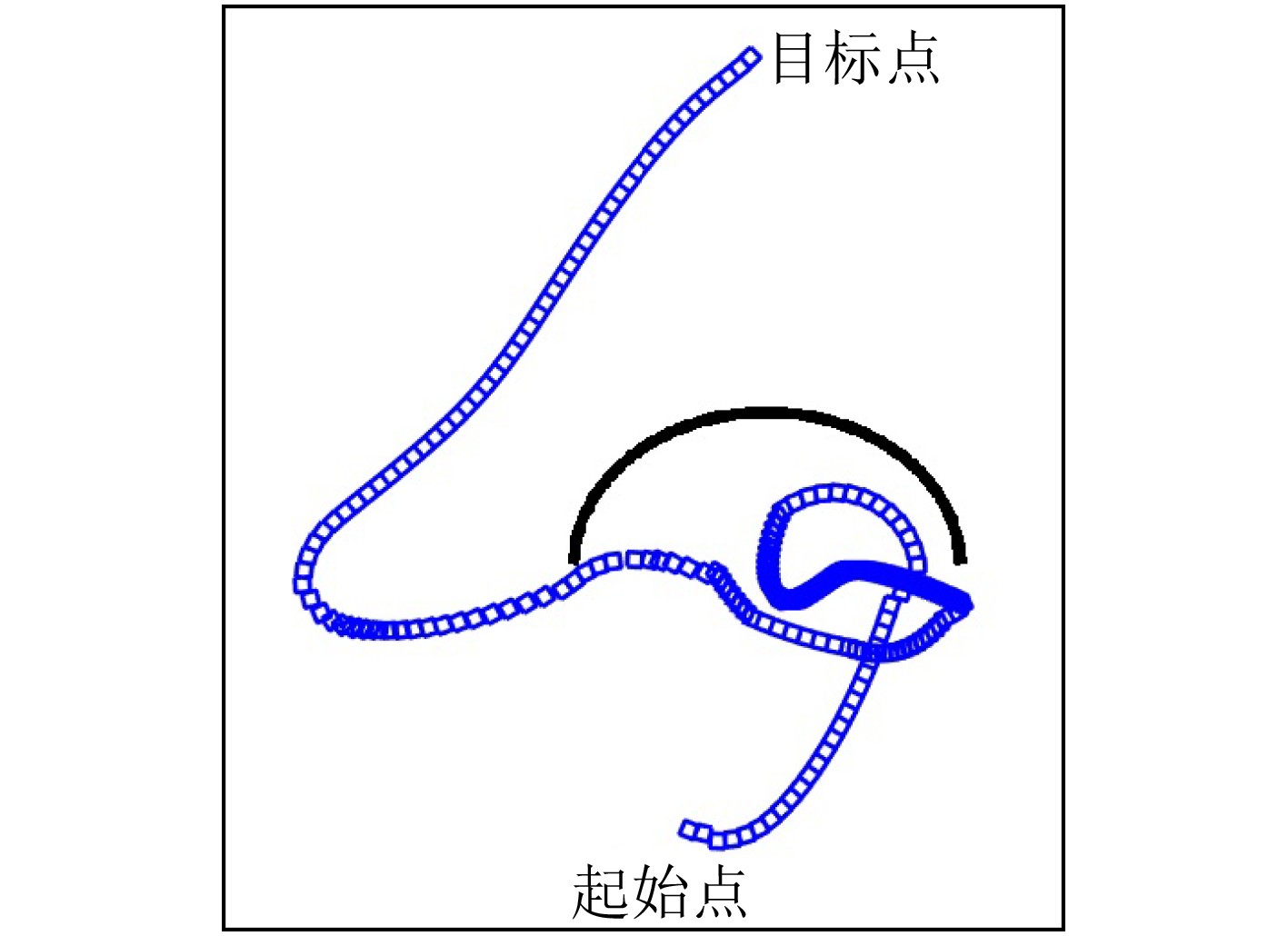
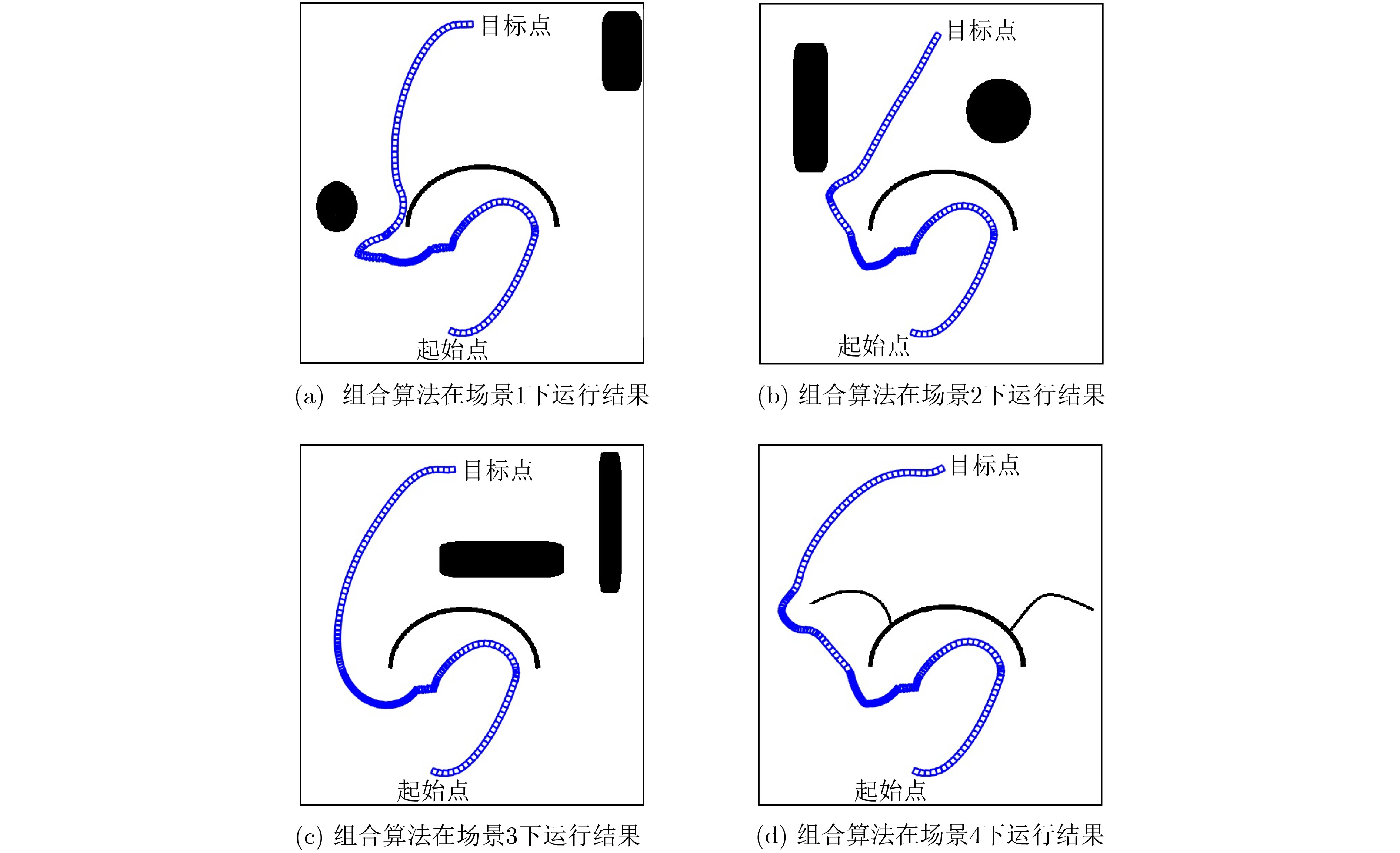
图 6 组合算法在其他场景下的运行结果
Figure 6.
-
符号 符号含义 符号 符号含义 ${\rm{obs}}$ 障碍物 ${\bf{X}}{\rm{d}}$ 目标位置 ${U_{{\rm{Xd}}}}(x)$ 引力势能 ${U_{{\rm{obs}}}}(x)$ 斥力势能 ${U_{{\rm{art}}}}(x)$ 总势能 ${{F}}$ 合力 ${{{F}}_{{\rm{Xd}}}}$ 吸引力 ${{F}}_{\rm{obs}}$ 排斥力 $j$ 移动机器人感知到的
周边障碍物的个数表 1 人工势场法符号含义
-
符号 符号含义 符号 符号含义 $g(\cdot )$ 从初始节点到当前移动机器人
所在节点node的启发式评估代价$h(\cdot )$ 从当前移动机器人所在节点node到
目标节点的启发式评估代价$(x_{\rm{start}},y_{\rm{start}})$ 初始节点坐标 $(x_{\rm{goal}},y_{\rm{goal}})$ 目标节点坐标 $(x,y)$ 移动机器人实时位置坐标 表 2 A*算法符号含义
-
符号 符号含义 符号 符号含义 $O_1$ 障碍物的左端点 $O_2$ 障碍物的右端点 $2\alpha $ 障碍物的长 $\beta $ 障碍物的宽 $v_t$ 移动机器人的实时线速度 $a$ 移动机器人在运行态时的最大速度 $\Delta d$ 移动机器人在某段时间内的移动距离 $S_{\rm{obs}}$ 所有障碍物总面积 $S_{\rm{map}}$ 地图面积 $\rho $ 障碍物密度 表 3 模型描述符号含义
-
算法 时间(s) 路径长度(m) A*算法 22.40 1040.69 改进人工势场法[15] 无穷大 无穷大 本文组合算法 10.62 707.09 表 4 算法性能比较
图共
6 个 表共
4 个